
A4988 กับ DRV8825 ไดรเวอร์สเต็ปเปอร์มอเตอร์: คู่มือการเลือกฉบับสมบูรณ์ (2026)
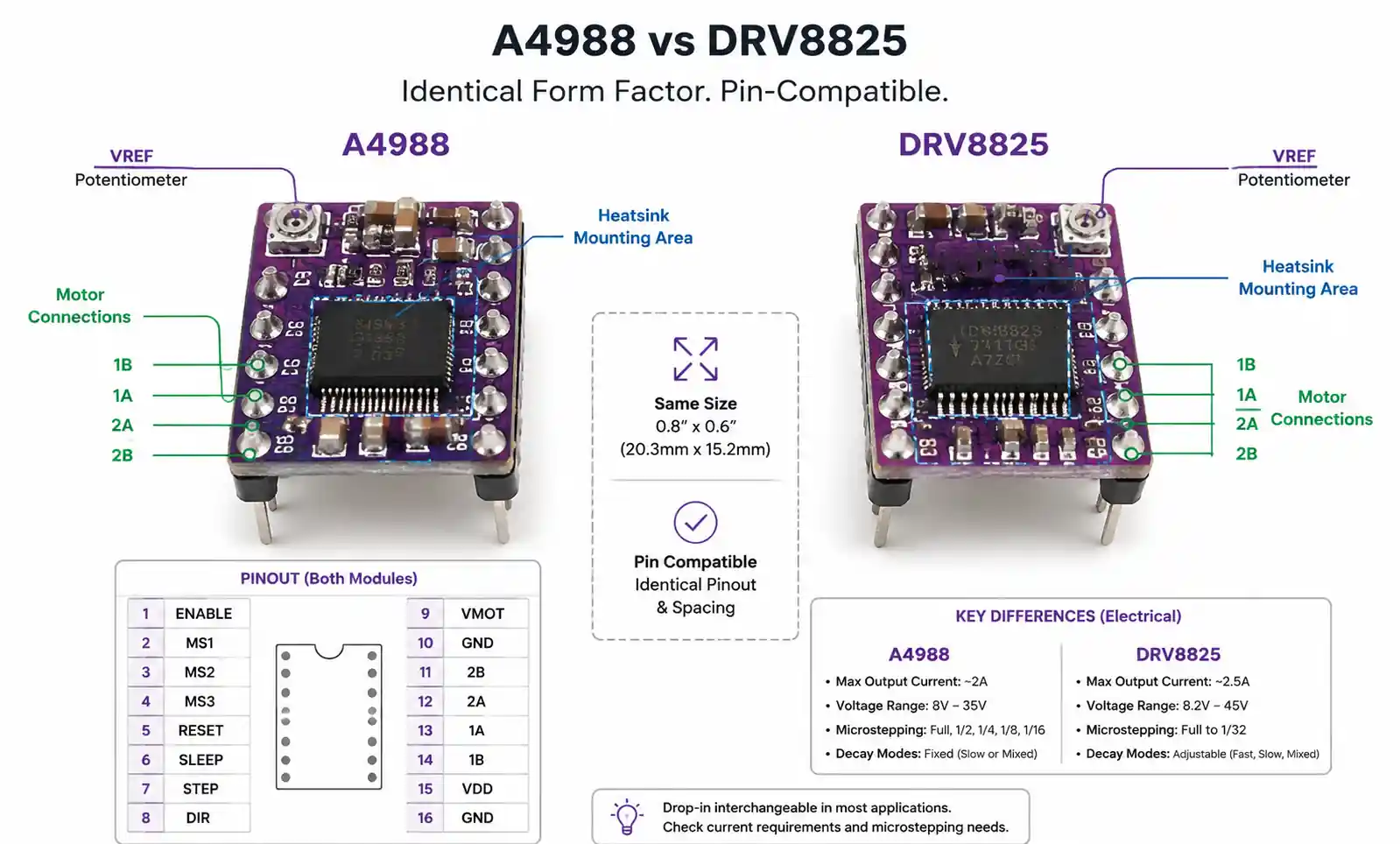
การเลือกระหว่างไดรเวอร์สเต็ปเปอร์มอเตอร์ A4988 และ DRV8825 ส่งผลต่อการส่งแรงบิด การจัดการความร้อน คุณภาพการเคลื่อนไหว และต้นทุนของระบบ ทั้งสองมีรอยเท้าและพินเอาต์เหมือนกัน แต่ลักษณะทางไฟฟ้าแตกต่างกันอย่างมาก คู่มือนี้ช่วยให้คุณจับคู่ความสามารถของไดรเวอร์กับความต้องการของมอเตอร์และแอปพลิเคชันของคุณ
สารบัญ
- เปรียบเทียบข้อมูลจําเพาะทางเทคนิคที่สําคัญ
- การวิเคราะห์ประสิทธิภาพ: การจัดการกระแสไฟฟ้าและการจัดการความร้อน
- ความสามารถของไมโครสเต็ปปิ้งและคุณภาพการเคลื่อนไหว
- คู่มือการเลือกแอปพลิเคชัน
- [ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไป](ข้อควรพิจารณา #design)
- คําถามที่พบบ่อย
- สรุป
1. เปรียบเทียบข้อมูลจําเพาะทางเทคนิคที่สําคัญ
| พารามิเตอร์ | A4988 | DRV8825 | ผลกระทบในทางปฏิบัติ |
|---|---|---|---|
| แรงดันไฟฟ้ามอเตอร์สูงสุด | 35V | 35V | 45V |
| กระแสไฟฟ้าต่อเนื่องต่อเฟส | 1A (ไม่มีฮีทซิงค์) | 1.5A (ไม่มีฮีทซิงค์) | DRV8825 ขับเคลื่อนมอเตอร์ขนาดใหญ่โดยไม่ต้องระบายความร้อนเพิ่มเติม |
| กระแสไฟสูงสุดต่อเฟส | 2A | 2A | 2A |
| ไมโครสเต็ปปิ้งสูงสุด | 1/16 ขั้นตอน | 1/32 ขั้นตอน | DRV8825 ให้ความละเอียดที่ละเอียดยิ่งขึ้นเพื่อการเคลื่อนไหวที่ราบรื่นยิ่งขึ้น |
| ความกว้างพัลส์ขั้นต่ํา | 1 ไมโครวินาที | 1.9 ไมโครวินาที | A4988 ตอบสนองต่อสัญญาณสเต็ปความเร็วสูงได้เร็วขึ้น |
| ลอจิกซัพพลาย Voltage | 3-5.5V | 3-5.5V | 2.5-5.25V |
| ความต้านทานความร้อน (θJA) | 45°C/W | 45°C 28°C/W | 28°C DRV8825 กระจายความร้อนได้อย่างมีประสิทธิภาพมากขึ้น |
| คุณสมบัติการป้องกัน | ความร้อนกระแสเกิน | ความร้อน, กระแสเกิน, UVLO | DRV8825 เพิ่มการล็อกแรงดันต่ํา |
พิกัดแรงดันไฟฟ้าและกระแสไฟฟ้าที่สูงขึ้นของ DRV8825 เหมาะกับมอเตอร์ NEMA 17 และ NEMA 23 ที่ใหญ่กว่า ในขณะที่ A4988 ยังคงคุ้มค่าสําหรับมอเตอร์ขนาดเล็ก ความแตกต่างของความต้านทานความร้อนมีความสําคัญในระบบปิด θJA ที่ต่ํากว่าของ DRV8825 ช่วยให้กระแสไฟฟ้าสูงขึ้นโดยไม่ต้องปิดระบบระบายความร้อน
2. ประสิทธิภาพการทํางาน: การจัดการกระแสไฟฟ้าและการจัดการความร้อน
ไดรเวอร์ทั้งสองใช้การควบคุมกระแสของสับผ่าน VREF: I_limit = VREF / (8 × R_sense) ด้วยตัวต้านทานความรู้สึกมาตรฐาน 0.1Ω VREF ตั้งแต่ 0.4V ถึง 2.0V ครอบคลุมสเต็ปเปอร์มอเตอร์ขนาดเล็กถึงขนาดกลางส่วนใหญ่
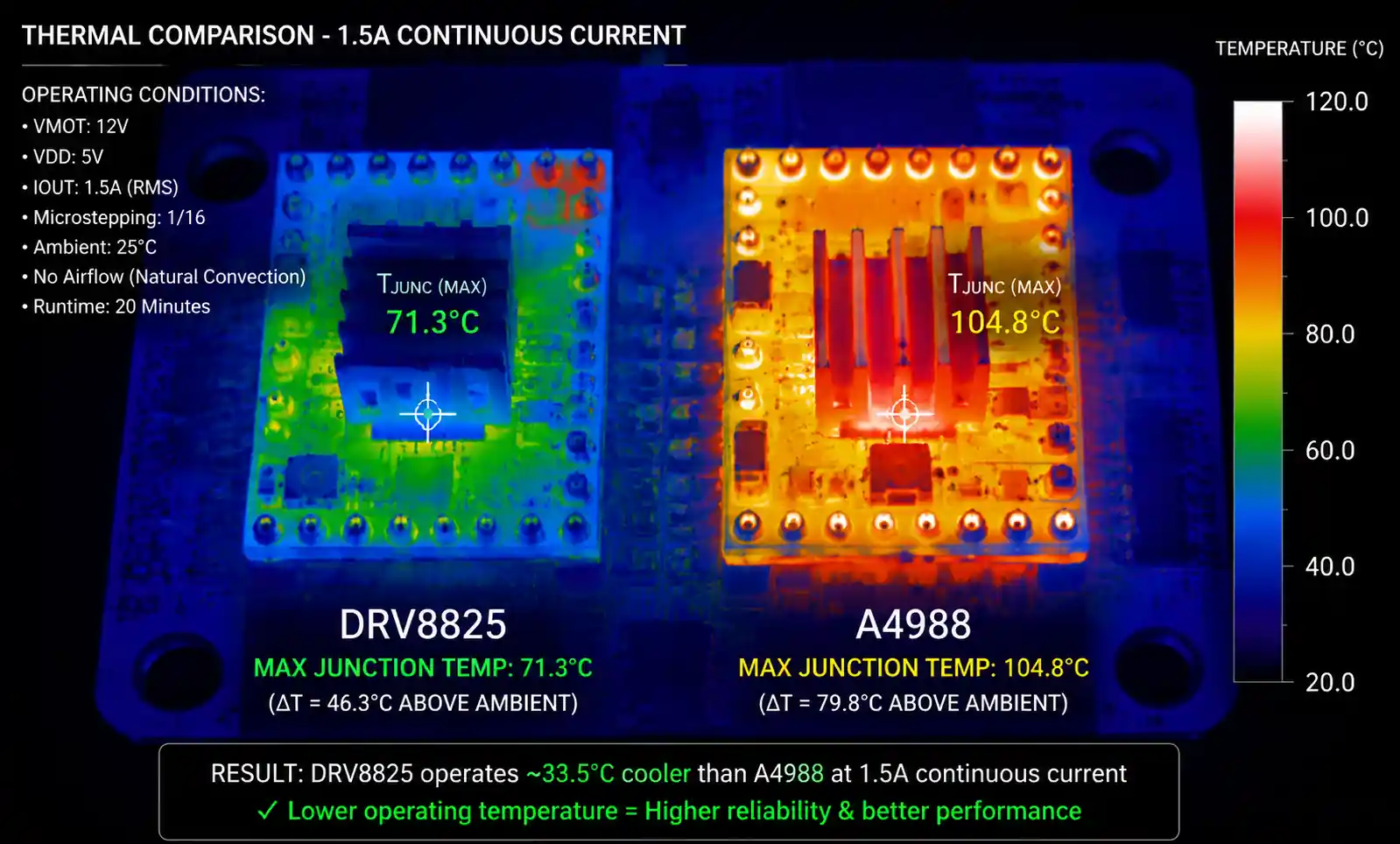
พิกัดต่อเนื่อง 4988A ของ A1A จํากัดการเลือกมอเตอร์ไว้ที่มอเตอร์ NEMA 14 ที่เล็กกว่าหรือมอเตอร์ NEMA 17 กระแสต่ํา เกินนี้จะทําให้เกิดการปิดระบบระบายความร้อนที่อุณหภูมิทางแยก ~150°C พิกัด 1.5A ของ DRV8825 ขยายไปถึงมอเตอร์ NEMA 17 มาตรฐาน (1.2-1.5A ต่อเฟส) ซึ่งพบได้ทั่วไปในเครื่องพิมพ์ 3 มิติและการใช้งาน CNC ขนาดเล็ก
การเปรียบเทียบประสิทธิภาพการระบายความร้อน
| สภาพการใช้งาน | A4988 อุณหภูมิเพิ่มขึ้น | DRV8825 อุณหภูมิเพิ่มขึ้น | ข้อกําหนดฮีทซิงค์ |
|---|---|---|---|
| 0.5A, 24V, 25°C แวดล้อม | ~20°C | ~12°C | ไม่มี |
| 1.0A, 24V, 25°C แวดล้อม | ~60°C | ~35°C | แนะนําสําหรับ A4988 |
| 1.5A, 24V, 25°C แวดล้อม | ความเสี่ยงจากการปิดระบบ | ~55°C | แนะนําสําหรับ DRV8825 |
| 2.0A, 24V, 25°C แวดล้อม | ไม่ปลอดภัย | ~85°C | จําเป็นสําหรับ DRV8825 |
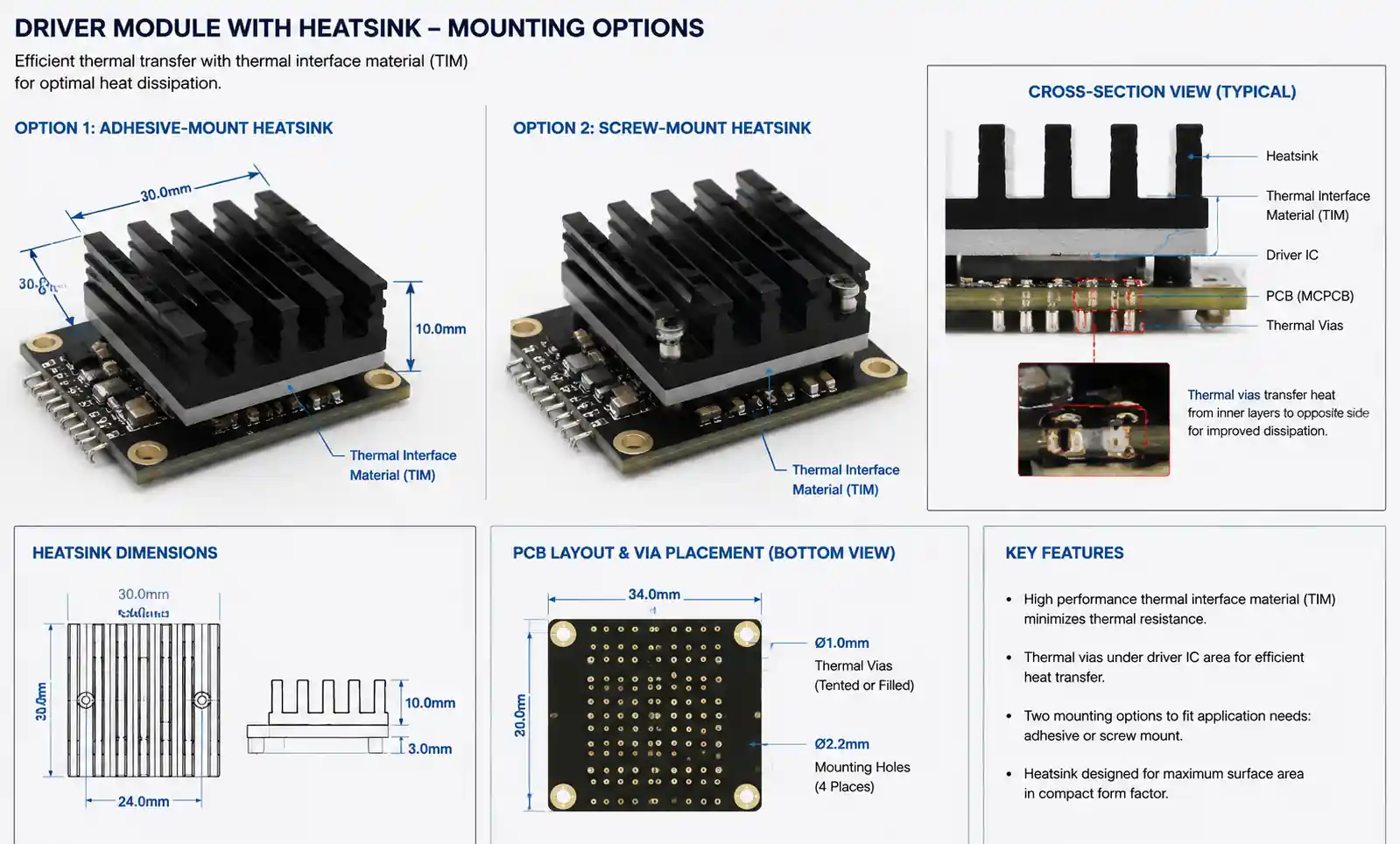
การติดตั้งฮีทซิงค์ช่วยลดอุณหภูมิทางแยกลง 20-30°C ขยายกระแสไฟที่ปลอดภัยได้ ~30% จําเป็นต้องมีการระบายความร้อนด้วยอากาศแบบบังคับต่อเนื่องที่สูงกว่า 1.2A โดยไม่คํานึงถึงตัวเลือกของผู้ขับขี่ RDS(on) ที่ต่ํากว่าของ DRV8825 (0.38Ω เทียบกับ 0.5Ω) ช่วยลดการสูญเสีย I²R โดยตรง สร้างความร้อนน้อยลงต่อแอมแปร์ที่ส่ง
3. ความสามารถของไมโครสเต็ปปิ้งและคุณภาพการเคลื่อนไหว
A4988 มีการตั้งค่าห้าแบบ (เต็มจนถึง 1/16) ในขณะที่ DRV8825 มีการตั้งค่าหกแบบ (ถึง 1/32) สําหรับมอเตอร์ 200 ขั้น A4988 ทําได้ 3200 ก้าว/รอบเทียบกับ 6400 สําหรับ DRV8825
นอกเหนือจากไมโครสเต็ปปิ้ง 1/16 การปรับปรุงความแม่นยําของตําแหน่งจะกลายเป็นเล็กน้อยเนื่องจากแรงบิดของมอเตอร์และข้อจํากัดของการควบคุมในปัจจุบัน โหมด 1/32 ของ DRV8825 มีค่ามากที่สุดในการลดเสียงสะท้อนระดับกลางและเสียงรบกวนมากกว่าความละเอียด 6400 ตําแหน่งที่แท้จริง
ที่ความเร็วต่ํา (<500 ก้าว/วินาที) ไมโครสเต็ปปิ้งที่สูงขึ้นจะช่วยลดการสั่นสะเทือน ซึ่งมองเห็นได้จากคุณภาพการพิมพ์หรือพื้นผิวที่ความเร็วสูง (>5000 ก้าว/วินาที) ประโยชน์ของไมโครสเต็ปปิ้งจะลดลง และประสิทธิภาพขึ้นอยู่กับการเลือกมอเตอร์และการปรับแต่งการเร่งความเร็วมากขึ้น
ไมโครสเต็ปปิ้งที่ละเอียดกว่าของ DRV8825 ช่วยลดแรงบิดกระเพื่อมจาก 5-8% (A4988 ที่ 1/16) เป็น 3-5% สําหรับการใช้งานที่มีความเร็วคงที่ เช่น ตัวเลื่อนกล้องหรือระบบจ่าย ความแตกต่างนี้สามารถวัดได้และส่งผลต่อคุณภาพเอาต์พุต
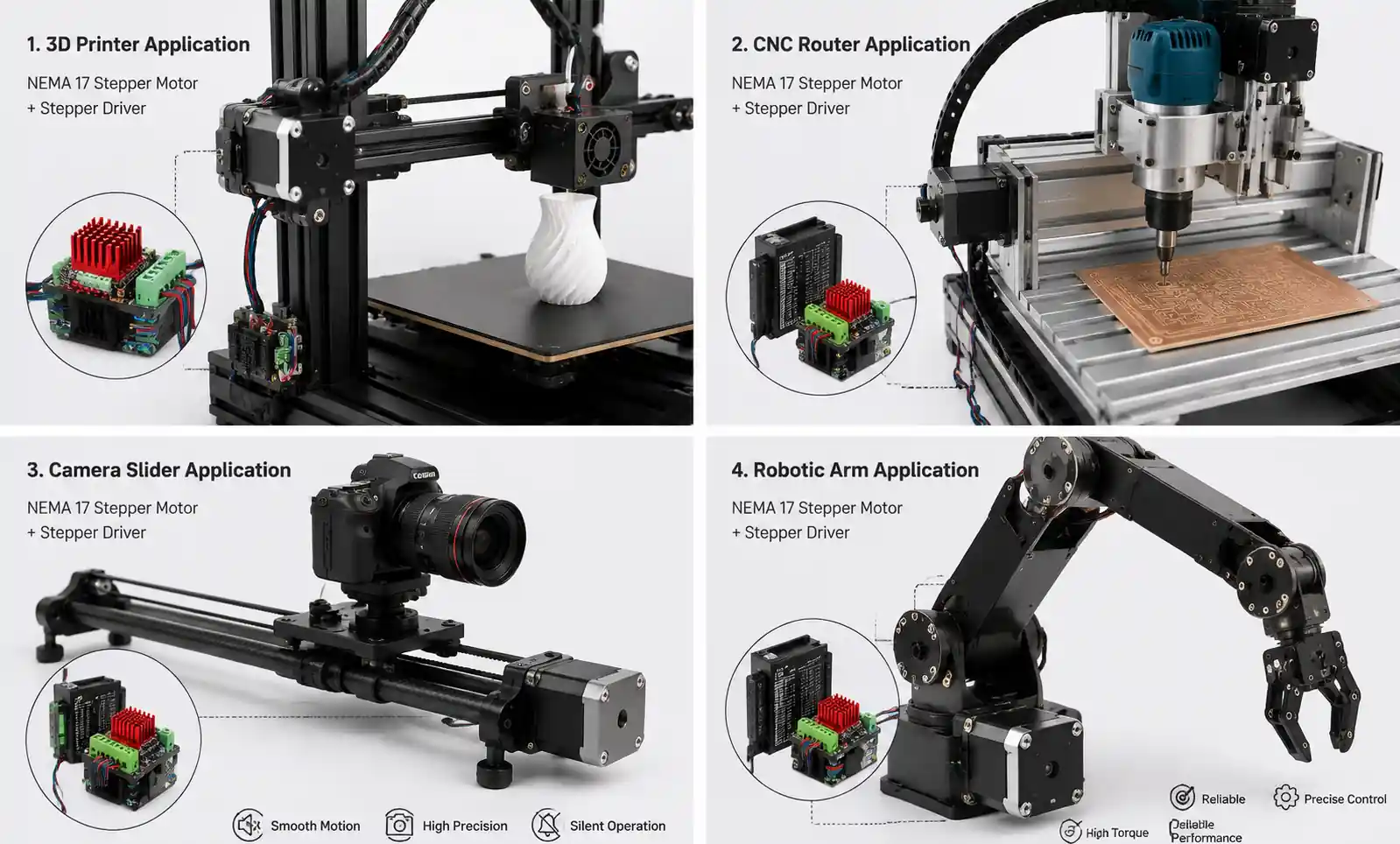
4. คู่มือการเลือกแอปพลิเคชัน
| ใบสมัคร | ขนาดมอเตอร์ | คนขับที่แนะนํา เหตุผลสําคัญ |
|---|---|---|
| เครื่องพิมพ์ 3 มิติ (มาตรฐาน) | NEMA 17, 1.2-1.5A | NEMA 17, 1.2-1.5A |
| เครื่องพิมพ์ 3 มิติ (งบประมาณ) | NEMA 17, 0.8-1.0A | NEMA 17, 0.8-1.0A |
| เราเตอร์ CNC (ขนาดเล็ก) | NEMA 23, 1.5-2.0A | NEMA 23, 1.5-2.0A |
| ตัวเลื่อนกล้อง | NEMA 14/17 | เนมา DRV8825 |
| เครื่องแกะสลักเลเซอร์ | NEMA 17, 1.0-1.2A | NEMA 17, 1.0-1.2A |
| ข้อต่อแขนหุ่นยนต์ | NEMA 17, 1.0-1.5A | NEMA 17, 1.0-1.5A |
| หยิบและวาง | NEMA 17, 1.2A | NEMA 17, 1.2A |
เลือก A4988 เมื่อ: กระแสมอเตอร์ ≤1A งบประมาณเป็นหลัก สเต็ปพัลส์ >150 kHz หรือการเคลื่อนไหวสตาร์ท-สต็อปอย่างรวดเร็วครอบงํา
เลือก DRV8825 เมื่อ: กระแสไฟมอเตอร์ >1A, แรงดันไฟฟ้าที่จ่ายเข้าใกล้ 30V, ความราบรื่นของการเคลื่อนไหวเป็นสิ่งสําคัญ, อุณหภูมิแวดล้อมเกิน 35°C หรือต้องการความละเอียดไมโครสเต็ปปิ้งสูงสุด
5. ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไป
พาวเวอร์ซัพพลาย: รวมความจุจํานวนมาก—อิเล็กโทรไลต์ขั้นต่ํา 100μF + เซรามิก 0.1μF ต่อไดรเวอร์ ความจุไม่เพียงพอทําให้เกิดแรงดันไฟฟ้าพุ่งสูงขึ้นซึ่งอาจเกินขีดจํากัด 4988V ของ A35 สําหรับไดรเวอร์หลายคน ให้คํานวณการจับฉลากสูงสุด: N_drivers × I_max × 1.4 โดยมีมาร์จิ้น 20%
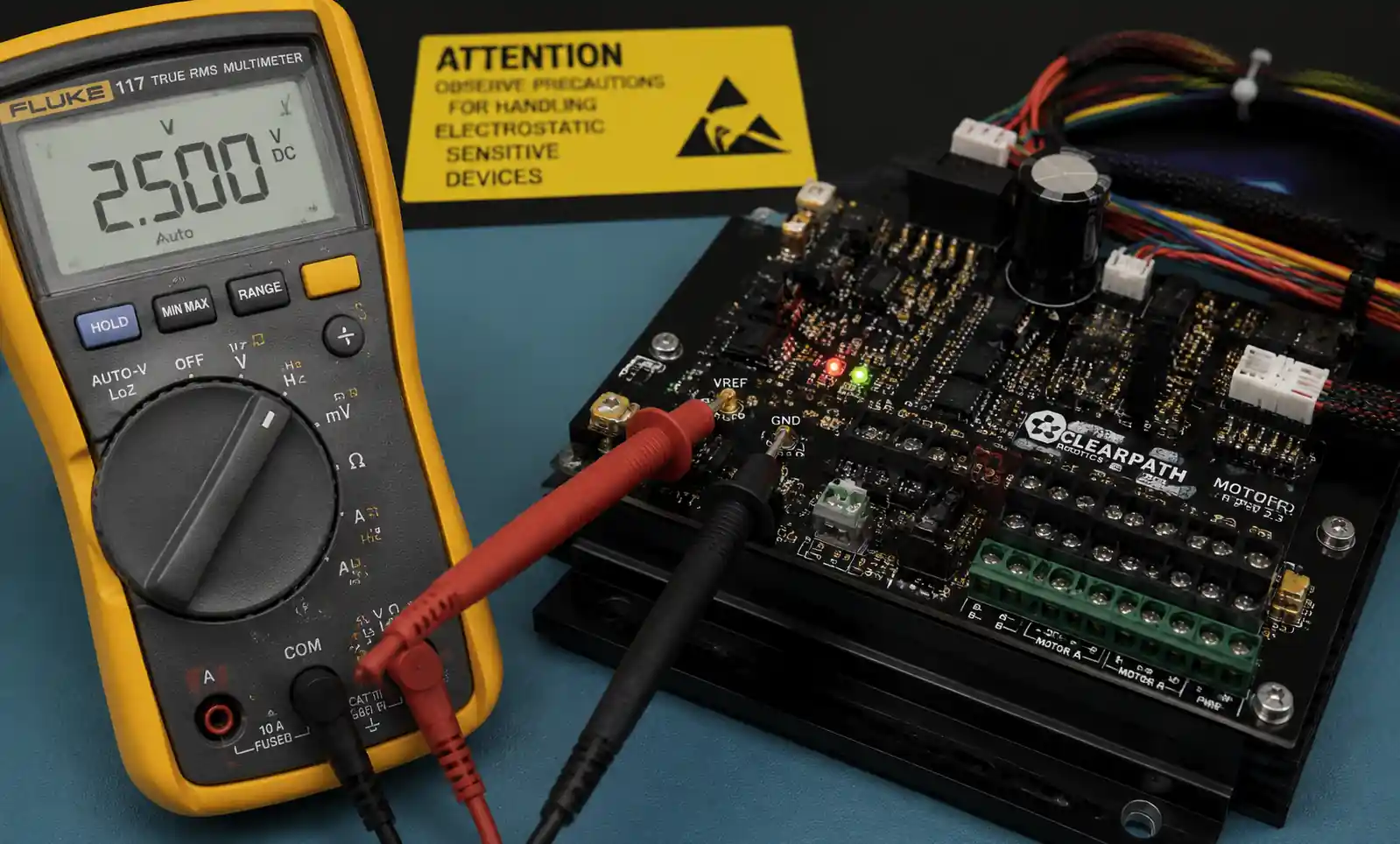
การตั้งค่า VREF: วัดด้วยไดรเวอร์ที่ขับเคลื่อนแต่ไม่ได้เชื่อมต่อมอเตอร์ คํานวณ: VREF = I_desired × 8 × R_sense สําหรับ R_sense = 0.1Ω และ I_desired = 1A: VREF = 0.8V สําหรับกระแส RMS (การสับไซน์) ให้คูณด้วย 0.7 เพื่อตั้งค่า RMS เป็น 70% ของพิกัดสูงสุด
เค้าโครง PCB: แผ่นระบายความร้อนที่สัมผัสต้องบัดกรีกับระนาบกราวด์ที่มีจุดแวะระบายความร้อนหลายจุด (เส้นผ่านศูนย์กลางขั้นต่ํา 4, 0.3 มม.) หากไม่มีจุดแวะที่เหมาะสมความร้อนจะไม่สามารถหลบหนีได้ทําให้ความสามารถในปัจจุบันลดลง 30-40% สูงกว่า 1.2A ให้เพิ่มฮีทซิงค์ (10-15°C/W)
ข้อผิดพลาดทั่วไปที่ควรหลีกเลี่ยง
| ความผิดพลาด | ผลที่ตามมา | การป้องกัน |
|---|---|---|
| การเชื่อมต่อ/ถอดมอเตอร์ขณะขับเคลื่อน | ความเสียหายของไดรเวอร์ | ปิดเครื่องก่อนเสมอ |
| การแยกส่วนไม่เพียงพอ แรงดันไฟฟ้าพุ่งเกินพิกัด | 100μF + 0.1μF ต่อไดรเวอร์ | |
| ตั้งค่าปัจจุบันสูงเกินไป มอเตอร์ร้อนเกินไป ตั้งค่าเป็น 70-80% ของพิกัดมอเตอร์ | ||
| ฮีทซิงค์หายไปที่กระแสไฟสูง การปิดระบบระบายความร้อน | เพิ่มฮีทซิงค์สูงกว่า 1A ต่อเนื่อง | |
| ไม่มีระยะขอบแรงดันไฟฟ้าบน VMOT | VMOT | VMOT แรงดันไฟฟ้าลดลงระหว่างการเคลื่อนที่ |
| เปิดใช้งานพินลอย | พฤติกรรมที่คาดเดาไม่ได้ ดึง ENABLE สูงหรือต่ําอย่างชัดเจน |
6. คําถามที่พบบ่อย
ฉันสามารถเปลี่ยน A4988 ด้วย DRV8825 โดยไม่ต้องเปลี่ยนวงจรได้หรือไม่
ใช่ พินเอาต์และรอยเท้าเดียวกัน ปรับ VREF และตรวจสอบปริมาณอุปทานของคุณ tage ไม่เกิน 35V การกําหนดค่าไมโครสเต็ปปิ้งแตกต่างกัน—DRV8825 ใช้พิน MODE2 สําหรับโหมด 1/32
อะไรทําให้เกิดการสั่นสะเทือนของเสียงสะท้อน
สเต็ปเปอร์มอเตอร์มีเสียงสะท้อนตามธรรมชาติ (โดยทั่วไปคือ 100-300 Hz) ซึ่งแรงบิดลดลงและการสั่นสะเทือนเพิ่มขึ้น ไมโครสเต็ปปิ้งที่สูงขึ้นจะเปลี่ยนการทํางานออกจากจุดเรโซแนนซ์ โหมด 1/32 ของ DRV8825 มีตัวเลือกการปรับแต่งเพิ่มเติม
ฉันจะคํานวณความเร็วสูงสุดได้อย่างไร
Max_RPM ≈ (V_supply × 60) / (8 × L × I × steps_per_rev × microstep_factor) สําหรับ NEMA 17 (3mH, 1.2A) ที่ 24V พร้อมไมโครสเต็ปปิ้ง 1/16: ≈156 RPM แรงดันไฟฟ้าที่สูงขึ้น (45V ของ DRV8825) เพิ่มความเร็วสูงสุด
สิ่งเหล่านี้ใช้ได้กับมอเตอร์ขั้วเดียวหรือไม่
ทั้งสองได้รับการออกแบบมาสําหรับมอเตอร์ไบโพลาร์เท่านั้น มอเตอร์ยูนิโพลาร์สามารถใช้ในโหมดไบโพลาร์ได้โดยตัดก๊อกตรงกลางทิ้งไว้ แต่แรงบิดจะลดลง ~30%
ทําไมคนขับถึงร้อนเมื่อหยุดนิ่ง?
ไดรเวอร์สเต็ปเปอร์รักษากระแสไฟที่ถือครอง (เท่ากับค่าสูงสุดที่กําหนดค่าไว้) เพื่อป้องกันการหมุนของเพลา ที่ 1A คาดว่าจะกระจายต่อเนื่อง 0.8-1.2W สําหรับช่วงเวลาที่ไม่ได้ใช้งานเป็นเวลานาน ให้ลดกระแสไฟผ่านคอนโทรลเลอร์หรือปิดใช้งานด้วย ENABLE
อะไรคือความแตกต่างในทางปฏิบัติระหว่าง 1/16 และ 1/32?
ความแตกต่างของความแม่นยําของตําแหน่งมีน้อย ทั้งคู่เกินความละเอียดของระบบกลไก 1/32 ช่วยลดเสียงรบกวนเป็นหลักและให้การเคลื่อนไหวที่ราบรื่นยิ่งขึ้นในการพิมพ์ 3 มิติหรือการเคลื่อนไหวของกล้อง แรงบิดต่ํากว่า 5-10% ที่ 1/32 เลือก 1/32 สําหรับคุณภาพเสียงและการเคลื่อนไหว ไม่ใช่ความแม่นยําของตําแหน่ง
ฉันสามารถขับขนานเพื่อเพิ่มกระแสได้หรือไม่
ไม่ การตรวจจับกระแสไฟฟ้าอิสระรบกวน สําหรับมอเตอร์ >2A ให้ใช้ไดรเวอร์กระแสไฟสูงกว่า (TB6600, DM542) ที่รองรับ 4-8A ต่อเฟส
7. สรุป
เลือก A4988 เมื่อ: มอเตอร์พิกัด ≤1A, รอบการทํางานปานกลาง, การออกแบบที่ไวต่อต้นทุน หรือความถี่ขั้นบันไดเข้าใกล้ 200 kHz
เลือก DRV8825 เมื่อ: มอเตอร์ที่ได้รับการจัดอันดับ >1A อุณหภูมิแวดล้อมที่สูงขึ้น หรือการเคลื่อนไหวที่ราบรื่นที่สุดโดยต้องการเสียงรบกวนน้อยที่สุด พิกัด 45V ให้พื้นที่ว่างสําหรับมอเตอร์ขนาดใหญ่หรือการเพิ่มแรงดันไฟฟ้าเพื่อเพิ่มแรงบิดความเร็วสูง
ก่อนสรุป: ตรวจสอบกระแสไฟพิกัดของมอเตอร์ต่อเฟส (เลือกไดรเวอร์ที่ให้ 120% พร้อมการระบายความร้อนที่เพียงพอ) ปริมาณอุปทาน tage (อยู่ในขีดจํากัด) และข้อกําหนดไมโครสเต็ปปิ้ง (ตรงกับความแม่นยําของตําแหน่งและข้อมูลจําเพาะของเสียงรบกวนของคุณ) สําหรับต้นแบบ การทดสอบไดรเวอร์ทั้งสองกับมอเตอร์และระบบกลไกเฉพาะของคุณเผยให้เห็นความแตกต่างด้านประสิทธิภาพอย่างชัดเจนที่สุด