

Buck Converter: หลักการทํางาน โทโพโลยี ข้อควรพิจารณาในการออกแบบ และการใช้งาน
Buck Converter (ตัวควบคุมการสลับแบบสเต็ปดาวน์) เป็นหนึ่งในโทโพโลยีการแปลงพลังงาน DC-DC พื้นฐานและใช้กันอย่างแพร่หลาย ด้วยการใช้ประโยชน์จากการสลับความถี่สูงและส่วนประกอบการจัดเก็บพลังงาน จึงมีประสิทธิภาพสูงและประสิทธิภาพการระบายความร้อนที่เหนือกว่าเมื่อเทียบกับตัวควบคุมเชิงเส้น บทความนี้ให้การวิเคราะห์เชิงลึกในระดับวิศวกรรมของตัวแปลงบั๊ก ซึ่งครอบคลุมหลักการทํางาน รูปแบบโทโพโลยี สมการการออกแบบหลัก กลยุทธ์การควบคุม และความท้าทายในการใช้งานจริง
สารบัญ
- [ข้อมูลเบื้องต้นเกี่ยวกับ Buck Converters] (ตัวแปลง #introduction เป็นบั๊ก)
- [หลักการทํางานและรอบการสลับ] (#operating-principle-and-switching-cycle)
- [องค์ประกอบหลักและเกณฑ์การคัดเลือก] (#key องค์ประกอบและเกณฑ์การคัดเลือก)
- [โทโพโลยีตัวแปลงบั๊ก] (โทโพโลยีตัวแปลง #buck)
- [สมการการออกแบบและข้อมูลเชิงลึกทางวิศวกรรม](#design สมการและข้อมูลเชิงลึกทางวิศวกรรม)
- [วิธีการควบคุมและความเสถียร] (#control วิธีการและความเสถียร)
- [Buck Converter vs Linear Regulator] (ตัวแปลง #buck เทียบกับตัวควบคุมเชิงเส้น)
- [การใช้งานทั่วไป] (#typical แอปพลิเคชัน)
- ปัญหาการออกแบบทั่วไปและแนวทางแก้ไข
- คําถามที่พบบ่อย
ข้อมูลเบื้องต้นเกี่ยวกับ Buck Converters
Buck Converter เป็น ตัวแปลง DC-DC แบบไม่แยก ที่ออกแบบมาเพื่อลดแรงดันไฟฟ้าขาเข้าที่สูงขึ้นเป็นแรงดันเอาต์พุตที่ต่ํากว่าอย่างมีประสิทธิภาพ ซึ่งแตกต่างจากตัวควบคุมเชิงเส้นตรงที่ไม่กระจายแรงดันไฟฟ้าส่วนเกินเป็นความร้อน แต่จะถ่ายโอนพลังงานผ่านองค์ประกอบการสลับและการจัดเก็บแทน
ลักษณะสําคัญ:
- ประสิทธิภาพสูง (โดยทั่วไป 85%–95%)
- การควบคุมตาม PWM
- การถ่ายโอนพลังงานผ่านตัวเหนี่ยวนํา
- แรงดันขาออกควบคุมโดยรอบการทํางาน
หลักการทํางานและรอบการสลับ
ตัวแปลงบั๊กทํางานผ่านการสลับเป็นระยะ ซึ่งโดยทั่วไปจะควบคุมโดย PWM
การสลับสถานะ
1. สถานะเปิด (ปิดสวิตช์)
- แรงดันไฟฟ้าขาเข้าถูกนําไปใช้กับตัวเหนี่ยวนํา
- กระแสเหนี่ยวนําเพิ่มขึ้นเป็นเส้นตรง
- พลังงานถูกเก็บไว้ในสนามแม่เหล็ก
2. สถานะปิด (เปิดสวิตช์)
- ตัวเหนี่ยวนําปล่อยพลังงานที่เก็บไว้
- กระแสไหลผ่านเส้นทางอิสระ
- กระแสเหนี่ยวนําลดลง
รูปที่ 1: Buck Converter สลับรูปคลื่น
- เนื้อหาที่แนะนํา: รูปคลื่นกระแสตัวเหนี่ยวนํา, แรงดันโหนดสวิตช์, สัญญาณ PWM *
องค์ประกอบหลักและเกณฑ์การคัดเลือก
1. MOSFET (สวิตช์)
- Rds ต่ํา (เปิด) ช่วยลดการสูญเสียการนําไฟฟ้า
- ประจุเกตต่ํา (Qg) ช่วยลดการสูญเสียการสลับ
- การแลกเปลี่ยนระหว่างประสิทธิภาพและความเร็วในการสลับ
2. ตัวเหนี่ยวนํา
- กําหนดกระแสกระเพื่อมและโหมดการนําไฟฟ้า
- หลีกเลี่ยงความอิ่มตัวของสี
- การออกแบบระลอกคลื่นทั่วไป: 20–40% ของกระแสไฟที่กําหนด
3. ตัวเก็บประจุ
- กรองการกระเพื่อมของแรงดันขาออก
- พารามิเตอร์ที่สําคัญ: ความจุและ ESR
4. ไดโอด / มอสเฟ็ทแบบซิงโครนัส
- ไดโอด: เรียบง่าย แต่มีประสิทธิภาพน้อยกว่า
- MOSFET: ประสิทธิภาพสูงขึ้นต้องการการควบคุม
รูปที่ 2: วงจรแปลงบั๊กพื้นฐาน
โทโพโลยีตัวแปลงบั๊ก
บั๊กแบบไม่ซิงโครนัส
- ใช้ไดโอดสําหรับอิสระ
- ต้นทุนที่ต่ํากว่า ประสิทธิภาพที่ต่ํากว่า
ซิงโครนัสบั๊ก
- ใช้ MOSFET แทนไดโอด
- ประสิทธิภาพสูงขึ้นโดยเฉพาะที่แรงดันไฟฟ้าต่ํา
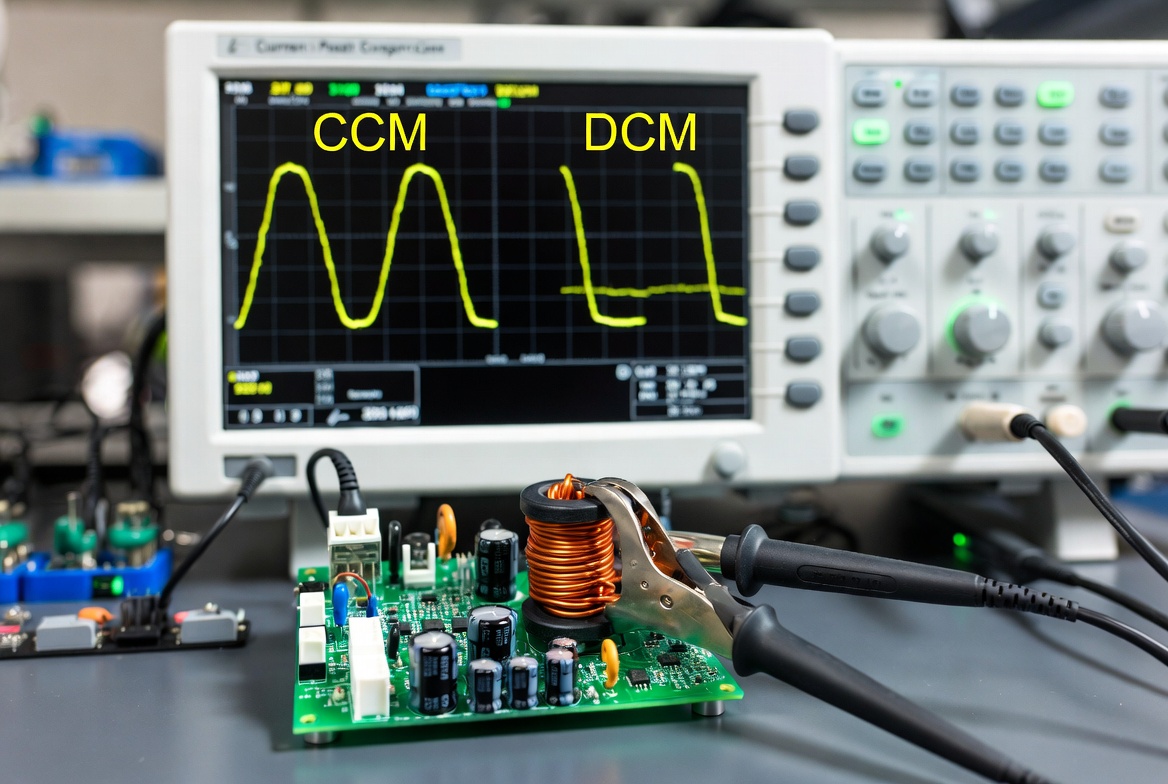
โหมดการนําไฟฟ้าต่อเนื่อง (CCM)
- กระแสเหนี่ยวนําไม่เคยถึงศูนย์
- ระลอกคลื่นต่ําและประสิทธิภาพที่สูงขึ้น
โหมดการนําไฟฟ้าไม่ต่อเนื่อง (DCM)
- กระแสเหนี่ยวนําลดลงเหลือศูนย์
- เหมาะสําหรับงานเบา
- ระลอกคลื่นและความซับซ้อนของ EMI ที่สูงขึ้น
บั๊กหลายเฟส
- หลายเฟส
- ลดระลอกคลื่นและปรับปรุงประสิทธิภาพการระบายความร้อน
รูปที่ 3: กระแสเหนี่ยวนํา CCM กับ DCM
สมการการออกแบบและข้อมูลเชิงลึกทางวิศวกรรม
ปริมาณการส่งออก tage
[ V_{out} = D \cdot V_{in} ]
ระลอกคลื่นปัจจุบันของตัวเหนี่ยวนํา
[ \Delta I_L = \frac{(V_{in} - V_{out}) \cdot D}{L \cdot f} ]
แรงดันขาออก tage Ripple
[ \Delta V_{out} \approx \frac{\Delta I_L}{8 \cdot f \cdot C} ]
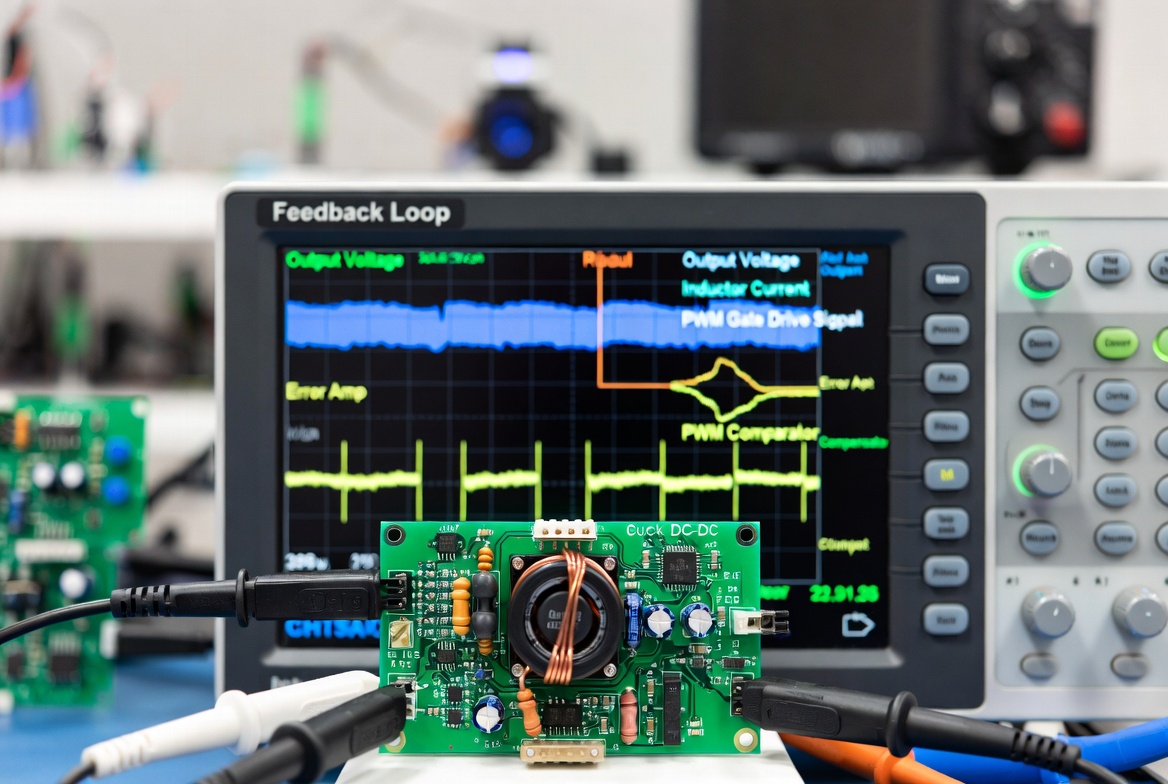
วิธีการควบคุมและความเสถียร
เทคนิคการควบคุม
- การควบคุมโหมดแรงดันไฟฟ้า (VMC)
- การควบคุมโหมดปัจจุบัน (CMC)
การออกแบบค่าตอบแทน
- การชดเชยประเภท II / ประเภท III
- มั่นใจได้ถึงความเสถียรของลูปและการตอบสนองชั่วคราว
รูปที่ 4: Control Loop และเครือข่ายการชดเชย
Buck Converter กับ Linear Regulator
| ลักษณะเฉพาะ | ตัวแปลงบั๊ก | ตัวควบคุมเชิงเส้น |
|---|---|---|
| อย่างมีประสิทธิภาพ | สูง (>85%) | ต่ํา |
| การสร้างความร้อน | ต่ํา | จุดสูง |
| ซับซ้อน | จุดสูง | ต่ํา |
| เสียงรบกวน | สูงขึ้น (สลับเสียงรบกวน) | ต่ํามาก |
| กรณีการใช้งานที่ดีที่สุด | ระบบพลังงานปานกลางถึงสูง | วงจรอะนาล็อกเสียงรบกวนต่ํา |
การใช้งานทั่วไป
พาวเวอร์ซัพพลาย CPU (VRM)
- ตัวแปลงบั๊กหลายเฟส
- การจัดส่งกระแสสูง
อุปกรณ์ที่ใช้พลังงานจากแบตเตอรี่
- สมาร์ทโฟน แท็บเล็ต
- ยืดอายุแบตเตอรี่
ไดรเวอร์ LED
- การควบคุมกระแสคงที่
- ประสิทธิภาพสูง
ยานยนต์อิเล็กทรอนิกส์
- การแปลง 12V เป็น 5V / 3.3V
- ความน่าเชื่อถือสูง
ระบบฝังตัว
- ไมโครคอนโทรลเลอร์และอุปกรณ์ IoT
- รางแรงดันไฟฟ้าที่เสถียร
ปัญหาการออกแบบทั่วไปและแนวทางแก้ไข
แรงดันขาออก tage Ripple
สาเหตุ: ESR สูงหรือความจุไม่เพียงพอ
วิธีแก้ไข: ใช้ตัวเก็บประจุ ESR ต่ําและเพิ่มความจุ
ปัญหา EMI
สาเหตุ: การเปลี่ยนการสลับอย่างรวดเร็ว
วิธีแก้ไข: เพิ่มวงจร snubber และปรับเค้าโครง PCB ให้เหมาะสม
MOSFET ร้อนเกินไป
สาเหตุ: การสูญเสียการสลับสูง
วิธีแก้ไข: ใช้ Qg MOSFET ต่ําและปรับปรุงเกทไดรฟ์
ความไม่มั่นคง
สาเหตุ: การออกแบบค่าตอบแทนที่ไม่ดี
วิธีแก้ไข: ปรับแต่งเครือข่ายการชดเชยและตรวจสอบด้วยพล็อต Bode
คําถามที่พบบ่อย
Q1: เหตุใดตัวแปลงบั๊กจึงมีประสิทธิภาพมากกว่าตัวควบคุมเชิงเส้น
เพราะพวกมันถ่ายโอนพลังงานผ่านการสลับและการจัดเก็บแทนที่จะกระจายแรงดันไฟฟ้าส่วนเกินเป็นความร้อน
Q2: ควรใช้ตัวแปลงบั๊กแบบซิงโครนัสเมื่อใด
- แรงดันขาออกต่ํา (<3.3V)
- การใช้งานในปัจจุบันสูง
- ระบบที่มีความสําคัญต่อประสิทธิภาพ
Q3: ความถี่ในการสลับที่สูงขึ้นจะดีกว่าเสมอหรือไม่?
ไม่ ความถี่ที่สูงขึ้นจะลดขนาด แต่เพิ่มการสูญเสียการสลับ
Q4: จะแยกแยะ CCM และ DCM ได้อย่างไร?
- CCM: กระแสเหนี่ยวนําไม่เคยถึงศูนย์
- DCM: กระแสเหนี่ยวนําถึงศูนย์ในแต่ละรอบ
Q5: ตัวแปลงบั๊กสามารถแยกได้หรือไม่?
ไม่ ตัวแปลงบั๊กมาตรฐานไม่แยก การแยกต้องใช้โทโพโลยีที่แตกต่างกัน เช่น ตัวแปลงฟลายแบ็ค
สรุป
Buck Converter เป็นรากฐานที่สําคัญของอุปกรณ์อิเล็กทรอนิกส์กําลังที่ทันสมัย แม้ว่าแนวคิดจะตรงไปตรงมา แต่การใช้งานในโลกแห่งความเป็นจริงจําเป็นต้องมีการแลกเปลี่ยนอย่างระมัดระวังระหว่างประสิทธิภาพ ประสิทธิภาพการระบายความร้อน EMI และความเสถียร ระบบขั้นสูงพึ่งพาการออกแบบแบบซิงโครนัสและหลายเฟสมากขึ้นเพื่อตอบสนองความต้องการด้านประสิทธิภาพที่ต้องการ