

แผงวงจรโดรน: ส่วนประกอบ สถาปัตยกรรม และเทคโนโลยีการควบคุมการบินขั้นสูง
แผงวงจรโดรนหรือที่เรียกกันทั่วไปว่า PCB ควบคุมการบิน เป็นสถาปัตยกรรมอิเล็กทรอนิกส์ส่วนกลางของอากาศยานไร้คนขับ (UAV) ที่ทันสมัย บอร์ดเหล่านี้รวมการตรวจจับการประมวลผลสัญญาณการควบคุมมอเตอร์การจัดการพลังงานและการสื่อสารไร้สายไว้ในระบบฝังตัวขนาดกะทัดรัด
จากมุมมองทางวิศวกรรมระบบ โดรน PCB ทํางานเป็น แพลตฟอร์มควบคุมแบบเรียลไทม์ ที่ประมวลผลข้อมูลจากเซ็นเซอร์เฉื่อย ตีความคําสั่งนักบิน ดําเนินการอัลกอริธึมการรักษาเสถียรภาพ และกระจายพลังงานไปยังระบบย่อยขับเคลื่อน
บทความนี้ให้ การวิเคราะห์ทางวิศวกรรมทางเทคนิค ของแผงวงจรโดรน ครอบคลุมสถาปัตยกรรม ไปป์ไลน์การประมวลผลสัญญาณ การออกแบบระบบย่อย อินเทอร์เฟซการสื่อสาร โหมดความล้มเหลวทั่วไป และแนวโน้มที่เกิดขึ้นใหม่ในอุปกรณ์อิเล็กทรอนิกส์ UAV และการผลิต PCB
สารบัญ
- 1. แผงวงจรโดรนคืออะไร
- 2. แผงวงจรโดรนทํางานอย่างไร
- 3. ส่วนประกอบหลักของตัวควบคุมการบินโดรน
- 4. ประเภทของแผงวงจรที่ใช้ในโดรน
- [5. ไปป์ไลน์การประมวลผลสัญญาณใน Drone Electronics] (# 5-signal-processing-pipeline-in-drone-electronics)
- 6. การกระจายพลังงานและการจัดการพลังงาน
- [7. ระบบสื่อสารบนแผงวงจรโดรน] (# 7-ระบบสื่อสารบนแผงวงจรโดรน)
- 8. ความล้มเหลวและการแก้ไขปัญหา PCB ของโดรนทั่วไป
- 9. การซ่อมแซมแผงวงจรโดรนที่เสียหาย
- [10. การอัพเกรดและดัดแปลงแผงวงจรโดรน] (#10-อัพเกรดและดัดแปลงแผงวงจรโดรน)
- [11. แนวโน้มที่เกิดขึ้นใหม่ในอุปกรณ์อิเล็กทรอนิกส์โดรนและเทคโนโลยี PCB] (#11-emerging-trends-in-drone-electronics-and-pcb-technology)
- 12. คําถามที่พบบ่อย
- 13. สรุป
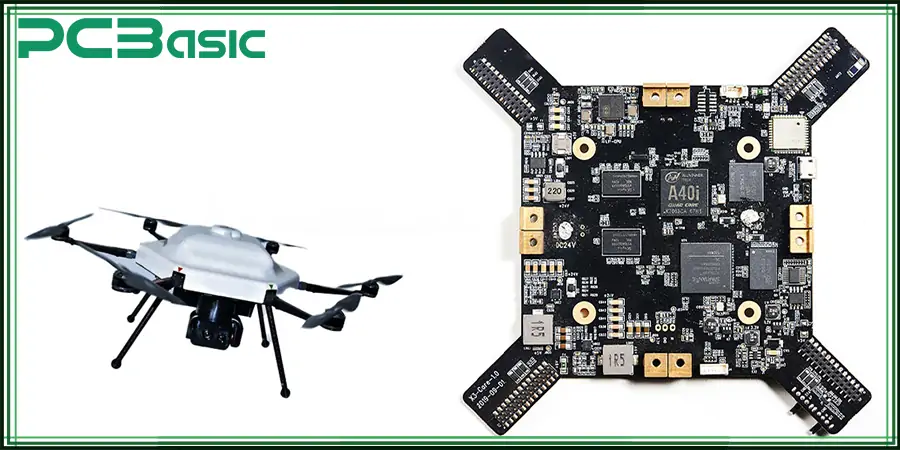
1. แผงวงจรโดรนคืออะไร?
แผงวงจรโดรน เป็นระบบอิเล็กทรอนิกส์ฝังตัวหลักที่รับผิดชอบ การควบคุมการบิน การนําทาง การประมวลผลสัญญาณ และการประสานงานระบบย่อย ใน UAV
ในโดรนที่ทันสมัยที่สุด บอร์ดนี้เรียกว่า ตัวควบคุมการบิน (FC) รวมระบบย่อยอิเล็กทรอนิกส์หลายระบบ ได้แก่ :
- ไมโครคอนโทรลเลอร์หรือโปรเซสเซอร์แบบฝังตัว
- หน่วยวัดแรงเฉื่อย (IMU)
- วงจรควบคุมพลังงาน
- อินเทอร์เฟซการควบคุมมอเตอร์
- โมดูลการสื่อสาร
- อินเทอร์เฟซเซ็นเซอร์ต่อพ่วง
จากมุมมองของสถาปัตยกรรมระบบ ตัวควบคุมการบินทําหน้าที่เป็น ระบบควบคุมวงปิด วัดสถานะทางกายภาพของโดรน (ตําแหน่ง ความเร็ว การวางแนว) อย่างต่อเนื่อง และปรับเอาต์พุตของมอเตอร์เพื่อรักษาการบินที่มั่นคง
2. แผงวงจรโดรนทํางานอย่างไร
ตัวควบคุมการบินของโดรนทํางานผ่าน ลูปควบคุมข้อเสนอแนะแบบเรียลไทม์ โดยทั่วไปลูปนี้จะทํางานที่ 500 Hz – 8 kHz ขึ้นอยู่กับความสามารถของเฟิร์มแวร์และฮาร์ดแวร์
ขั้นตอนลูปควบคุม
- การได้มาซึ่งอินพุต
- ฟิวชั่นเซ็นเซอร์
- การควบคุมการประมวลผลอัลกอริทึม
- การสร้างเอาต์พุตของมอเตอร์
- การแก้ไขข้อเสนอแนะ
เซนเซอร์ฟิวชั่น
ตัวควบคุมรวบรวมข้อมูลจากเซ็นเซอร์หลายตัว:
- ไจโรสโคป
- มาตรความเร่ง
- เครื่องวัดสนามแม่เหล็ก
- บารอมิเตอร์
- โมดูล GPS
อินพุตเหล่านี้ถูกหลอมรวมโดยใช้อัลกอริทึมเช่น:
- ตัวกรอง Kalman
- ตัวกรองเสริม
- ฟิลเตอร์ Mahony / Madgwick
กระบวนการนี้สร้างการประมาณการที่แม่นยําของ ทัศนคติและตําแหน่ง ของโดรน
การควบคุมการบิน PID
โดรนส่วนใหญ่พึ่งพา ลูปควบคุม PID:
[ เอาต์พุต = K_p \cdot e + K_i \int e,dt + K_d \frac{de}{dt} ]
ที่ไหน:
- (e) = ข้อผิดพลาดระหว่างการวางแนวที่ต้องการและที่วัดได้
- (K_p) = กําไรตามสัดส่วน
- (K_i) = กําไรอินทิกรัล
- (K_d) = กําไรอนุพันธ์
พารามิเตอร์เหล่านี้ควบคุมว่าโดรนแก้ไขการเคลื่อนไหวอย่างก้าวร้าวเพียงใด
3. ส่วนประกอบหลักของตัวควบคุมการบินโดรน
แผงวงจรโดรนรวมโมดูลการทํางานหลายโมดูล
ไมโครคอนโทรลเลอร์ / โปรเซสเซอร์
โปรเซสเซอร์คือ แกนหลักการคํานวณ ของโดรน
ตระกูล MCU ทั่วไป ได้แก่:
- ซีรีส์ STM32
- โปรเซสเซอร์ ARM Cortex-M
ความรับผิดชอบหลัก:
- การเรียกใช้เฟิร์มแวร์การบิน
- การดําเนินการอัลกอริทึมการควบคุม
- การจัดการฟิวชั่นเซ็นเซอร์
- การจัดการโปรโตคอลการสื่อสาร
หน่วยวัดแรงเฉื่อย (IMU)
โดยทั่วไป IMU จะรวม:
- ไจโรสโคป 3 แกน
- มาตรความเร่ง 3 แกน
เซ็นเซอร์เหล่านี้วัด ความเร็วเชิงมุมและความเร่งเชิงเส้น
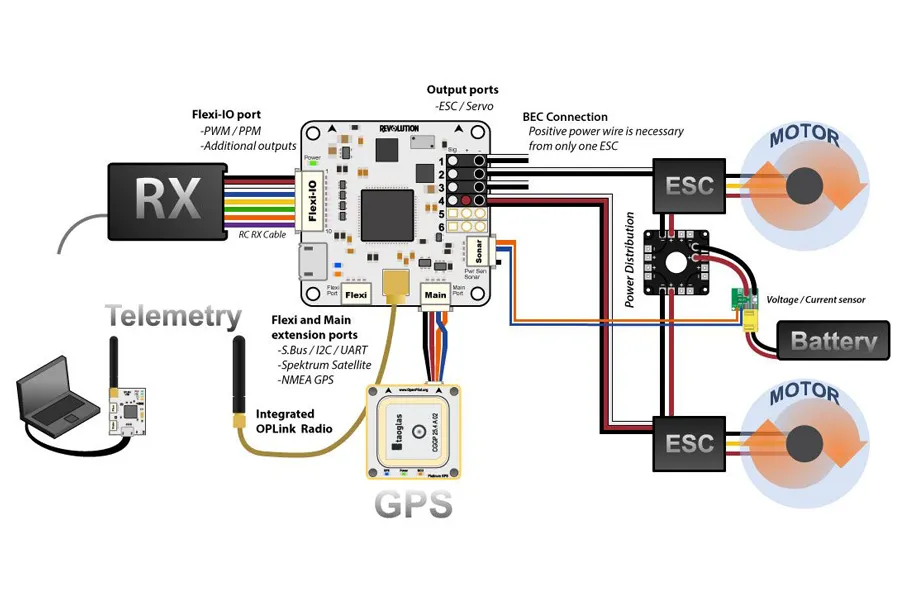
อินเทอร์เฟซการควบคุมมอเตอร์
ตัวควบคุมการบินส่งสัญญาณไปยัง ESC (ตัวควบคุมความเร็วอิเล็กทรอนิกส์) ผ่าน:
- พีดับบลิวเอ็ม
- วันช็อต
- โปรโตคอลดิจิทัล DShot
วงจรควบคุมพลังงาน
ตัวควบคุมแรงดันไฟฟ้าแปลงแรงดันแบตเตอรี่เป็นรางที่เสถียร:
- ราง 5V
- รางลอจิก 3.3V
อินเทอร์เฟซอุปกรณ์ต่อพ่วง
อินเทอร์เฟซทั่วไป ได้แก่ :
- ยูอาร์ต
- เอสพีไอ
- ไอ²ซี
- CAN บัส (โดรนขั้นสูง)
4. ประเภทของแผงวงจรที่ใช้ในโดรน
โดยทั่วไปแล้วอุปกรณ์อิเล็กทรอนิกส์ของโดรนจะแบ่งออกเป็นโมดูล PCB เฉพาะหลายโมดูล
คณะกรรมการควบคุมการบิน
จัดการ:
- การประมวลผลเซ็นเซอร์
- อัลกอริทึมการควบคุม
- เสถียรภาพการบิน
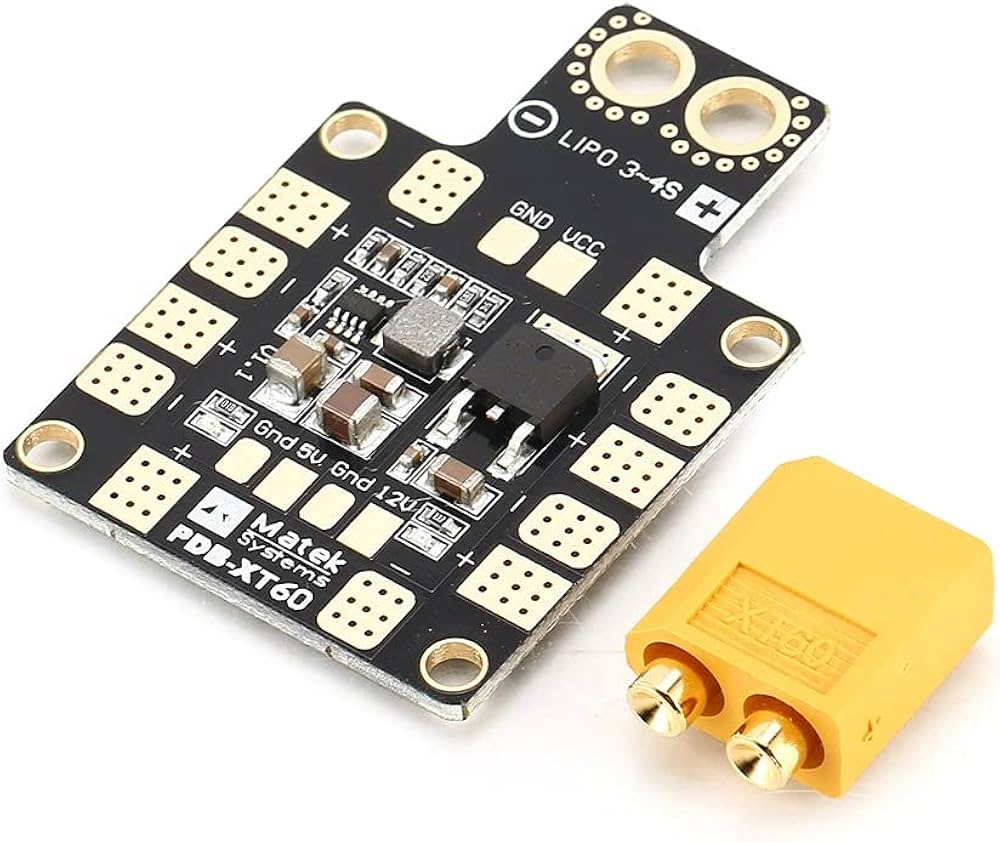
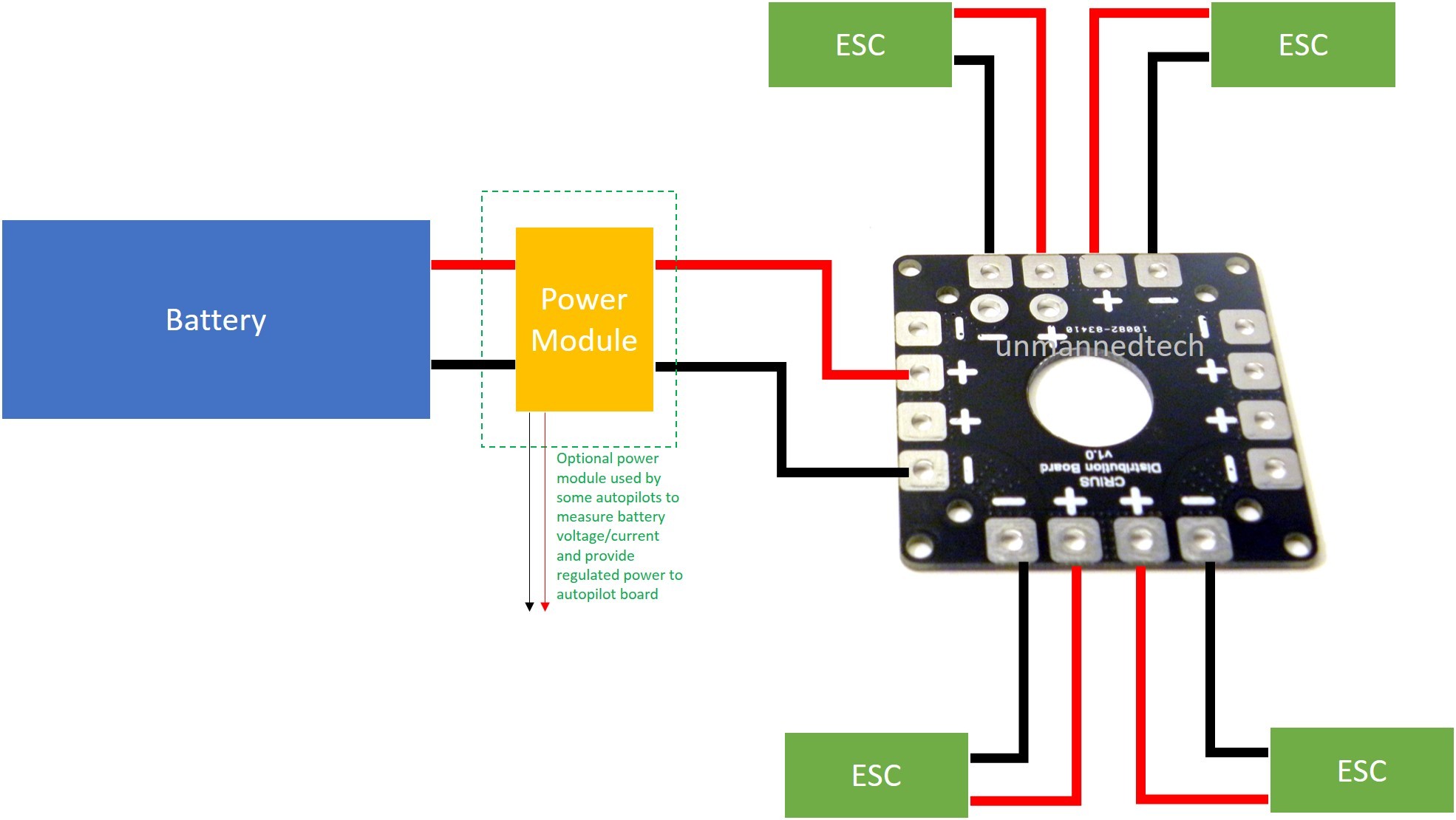
แผงจ่ายไฟ (PDB)
กระจายพลังงานแบตเตอรี่ไปยัง:
- ESC
- ตัวควบคุมการบิน
- อุปกรณ์อิเล็กทรอนิกส์น้ําหนักบรรทุก
บอร์ด ESC
ESC แปลงพลังงานแบตเตอรี่ DC เป็น สัญญาณขับเคลื่อนมอเตอร์สามเฟส
บอร์ด GPS
ให้:
- การติดตามตําแหน่ง
- การนําทาง
- ฟังก์ชันการกลับบ้าน
บอร์ดวิดีโอ / กล้อง
จัดการ:
- การจับภาพ
- การส่งสัญญาณ FPV
- การซ้อนทับการวัดและส่งข้อมูลทางไกล
5. ไปป์ไลน์การประมวลผลสัญญาณใน Drone Electronics
การประมวลผลสัญญาณภายในตัวควบคุมการบินของโดรนเป็นไปตามไปป์ไลน์ที่มีโครงสร้าง
1. การรับสัญญาณ
อินพุตรวมถึง:
- สัญญาณรีโมทคอนโทรล
- ข้อมูล IMU
- ข้อมูล GPS
- สัญญาณ telemetry
2. เซนเซอร์ฟิวชั่น
สัญญาณเซ็นเซอร์ดิบมีเสียงดังและต้องกรอง
เทคนิคการกรองทั่วไป ได้แก่ :
- ฟิลเตอร์ Low-pass
- ตัวกรอง Kalman
- ตัวกรองเสริม
3. การควบคุมการดําเนินการอัลกอริทึม
เฟิร์มแวร์ควบคุมคํานวณ การปรับแรงขับของมอเตอร์ที่ต้องการ
4. เอาต์พุตมอเตอร์
คําสั่งจะถูกส่งไปยัง ESC ผ่านสัญญาณดิจิตอลหรือ PWM
5. ข้อเสนอแนะการรักษาเสถียรภาพ
ลูปจะทําซ้ําอย่างต่อเนื่องเพื่อรักษา ไดนามิกการบินที่เสถียร
6. การจ่ายพลังงานและการจัดการพลังงาน
สถาปัตยกรรมพลังงานมีความสําคัญต่อความน่าเชื่อถือของโดรน
แหล่งแบตเตอรี่
โดรนส่วนใหญ่ใช้ แบตเตอรี่ LiPo ตั้งแต่:
- 2 วินาที (7.4V)
- 4 ส (14.8 โวลต์)
- 6 วินาที (22.2 โวลต์)
ฉบับ tag ระเบียบอี
ตัวแปลง DC-DC สร้างแรงดันไฟฟ้าที่เสถียร:
- 5V สําหรับระบบลอจิก
- 3.3V สําหรับเซ็นเซอร์
การกระจายปัจจุบัน
รถโดยสารส่งพลังงานไปยัง:
- มอเตอร์
- คอนโทรลเลอร์
- อุปกรณ์อิเล็กทรอนิกส์น้ําหนักบรรทุก
การออกแบบ PCB ที่เหมาะสมต้องคํานึงถึง:
- ความกว้างของร่องรอยทองแดง
- การกระจายความร้อน
- ความจุปัจจุบัน
7. ระบบสื่อสารบนแผงวงจรโดรน
Drone PCB รองรับระบบย่อยการสื่อสารหลายระบบ
ลิงค์รีโมทคอนโทรล
โปรโตคอลวิทยุทั่วไป ได้แก่ :
- เอสบีเอส
- ซีอาร์เอสเอฟ
- ดีเอสเอ็มเอ็กซ์
สิ่งเหล่านี้ส่งคําสั่งนักบินไปยังตัวควบคุมการบิน
การสื่อสาร GPS
โมดูล GPS เชื่อมต่อผ่าน UART
ข้อมูลประกอบด้วย:
- ละติจูด
- ลองจิจูด
- ระดับความสูง
- ความเร็ว
การวัดและส่งข้อมูลทางไกล
Telemetry ส่งข้อมูลแบบเรียลไทม์ไปยังสถานีภาคพื้นดิน:
- แรงดันแบตเตอรี่
- โหมดการบิน
- ระดับความสูง
- ความแรงของสัญญาณ
การส่งวิดีโอ
โดรน FPV ส่งวิดีโอผ่าน:
- อนาล็อก 5.8 GHz
- ระบบดิจิตอล HD
8. ความล้มเหลวของ PCB โดรนทั่วไปและการแก้ไขปัญหา
| ปัญหา | สาเหตุที่เป็นไปได้ | โซลูชั่นทางวิศวกรรม |
|---|---|---|
| โดรนไม่เปิดเครื่อง | แบตเตอรี่หรือปริมาตร tag ความล้มเหลวของตัวควบคุม | ตรวจสอบปริมาณแบตเตอรี่ tage และรางไฟฟ้า |
| ส่วนประกอบที่ร้อนเกินไป | ไฟฟ้าลัดวงจรหรือกระแสไฟมากเกินไป | ตรวจสอบร่องรอย PCB และการระบายความร้อน |
| เที่ยวบินไม่เสถียร | เซ็นเซอร์เบี่ยงเบนหรือข้อผิดพลาดในการสอบเทียบ | ปรับเทียบเซ็นเซอร์ IMU ใหม่ |
| สัญญาณอ่อน | ปัญหาเสาอากาศหรือเครื่องรับ | ตรวจสอบการเดินสายเสาอากาศและเครื่องรับ |
| ส่วนประกอบที่ถูกเผา | ESC หรือความเสียหายจากไฟกระชาก | เปลี่ยนส่วนประกอบที่เสียหาย |
| มอเตอร์ขัดข้อง | สายสัญญาณ ESC เสีย | ตรวจสอบการเชื่อมต่อ ESC |
9. ซ่อมแผงวงจรโดรนที่เสียหาย
การซ่อมแซม PCB ของโดรนต้องมีการวินิจฉัยอย่างรอบคอบ
1. การตรวจสอบด้วยสายตา
ตรวจสอบ:
- ไอซีที่ถูกเผา
- ตัวเก็บประจุเสียหาย
- ขั้วต่อเสีย
2. การทําความสะอาด
ใช้:
- ไอโซโพรพิลแอลกอฮอล์
- แปรงป้องกันไฟฟ้าสถิตย์
3. การทดสอบทางไฟฟ้า
วงจรทดสอบด้วย:
- มัลติมิเตอร์
- ออสซิลโลสโคป
4. การเปลี่ยนส่วนประกอบ
เปลี่ยนชิ้นส่วนที่ชํารุด เช่น:
- หน่วยงานกํากับดูแล
- ตัวเก็บประจุ
- ตัวเชื่อมต่อ
5. ซ่อมข้อต่อประสาน
ข้อต่อบัดกรีเย็นอาจทําให้เกิดความผิดพลาดเป็นระยะ
6. การทดสอบการทํางาน
การตรวจสอบขั้นสุดท้ายควรประกอบด้วย:
- การทดสอบมอเตอร์
- การสอบเทียบเซ็นเซอร์
- การทดสอบการบิน
10. การอัพเกรดและดัดแปลงแผงวงจรโดรน
ผู้ใช้ขั้นสูงมักจะอัพเกรดอุปกรณ์อิเล็กทรอนิกส์ของโดรน
การปรับเปลี่ยนทั่วไป ได้แก่ :
- การติดตั้งไมโครคอนโทรลเลอร์ที่เร็วขึ้น
- การเพิ่มเซ็นเซอร์วัดการไหลแบบออปติคัล
- การรวมโมดูล LiDAR
- การอัปเกรดโปรโตคอล ESC
- การเพิ่มโมดูลการวัดและส่งข้อมูลทางไกลระยะไกล
สิทธิประโยชน์รวมถึง:
- ปรับปรุงเสถียรภาพการบิน
- ระยะการบินที่ไกลขึ้น
- ความสามารถในการนําทางที่ดีขึ้น
อย่างไรก็ตาม การปรับเปลี่ยนต้องพิจารณาอย่างรอบคอบเกี่ยวกับ:
- การใช้พลังงาน
- ความเข้ากันได้ของเฟิร์มแวร์
- ข้อจํากัดของเค้าโครง PCB
11. แนวโน้มที่เกิดขึ้นใหม่ในอุปกรณ์อิเล็กทรอนิกส์โดรนและเทคโนโลยี PCB
อุปกรณ์อิเล็กทรอนิกส์ของโดรนมีการพัฒนาอย่างรวดเร็ว
การออกแบบ PCB ความหนาแน่นสูง
บอร์ด UAV สมัยใหม่ใช้:
- PCB หลายชั้น
- เทคโนโลยี HDI
- ส่วนประกอบระยะพิทช์ละเอียด
ตัวควบคุมการบินที่เปิดใช้งาน AI
ปัญญาประดิษฐ์ช่วยให้:
- การหลีกเลี่ยงสิ่งกีดขวาง
- การนําทางอัตโนมัติ
- การติดตามวัตถุ
การสื่อสาร 5G
5G ปรับปรุง:
- การสตรีมวิดีโอแบบเรียลไทม์
- รีโมทคอนโทรลที่มีความหน่วงแฝงต่ํา
วัสดุขั้นสูง
ปรับปรุงวัสดุ PCB ใหม่:
- การจัดการความร้อน
- ความสมบูรณ์ของสัญญาณ
บรรจุภัณฑ์อิเล็กทรอนิกส์ 3 มิติ
การออกแบบ PCB แบบเรียงซ้อนช่วยลดขนาดและน้ําหนัก
12. คําถามที่พบบ่อย
ตัวควบคุมการบินโดรนทําหน้าที่อะไร?
ตัวควบคุมการบินประมวลผลข้อมูลเซ็นเซอร์และคําสั่งนักบินเพื่อควบคุมความเร็วของมอเตอร์ ช่วยให้โดรนรักษาสมดุลและนําทางได้อย่างแม่นยํา
เหตุใดเซ็นเซอร์ IMU จึงมีความสําคัญในโดรน
เซ็นเซอร์ IMU วัดการเคลื่อนไหวและการวางแนว ทําให้ตัวควบคุมสามารถรักษาเสถียรภาพของเครื่องบินระหว่างการบินได้
โดรนสามารถทํางานโดยไม่มี GPS ได้หรือไม่?
ใช่. โดรนจํานวนมากสามารถบินได้โดยใช้เซ็นเซอร์ IMU เท่านั้น แม้ว่า GPS จะปรับปรุงการนําทางและเปิดใช้งานคุณสมบัติอิสระ
อะไรทําให้ PCB โดรนล้มเหลวบ่อยที่สุด?
สาเหตุทั่วไป ได้แก่ :
- ไฟกระชาก
- ความเสียหายจากความชื้น
- ความร้อนสูงเกินไป
- ผลกระทบทางกล
13. สรุป
แผงวงจรโดรนแสดงถึง โครงสร้างพื้นฐานด้านความฉลาดและการควบคุมส่วนกลางของระบบ UAV ที่ทันสมัย ด้วยการรวมการตรวจจับอัลกอริธึมการควบคุมการจัดการพลังงานและอินเทอร์เฟซการสื่อสารตัวควบคุมการบินช่วยให้การบินมีเสถียรภาพและตอบสนอง
เมื่อการใช้งาน UAV ขยายตัว ตั้งแต่การถ่ายภาพทางอากาศไปจนถึงการตรวจสอบทางอุตสาหกรรมและโลจิสติกส์อัตโนมัติ ความก้าวหน้าใน การรวม AI การออกแบบ PCB ความหนาแน่นสูง และเทคโนโลยีการสื่อสารความเร็วสูง กําลังขับเคลื่อนแพลตฟอร์มโดรนรุ่นต่อไป