

วิธีการเลือก IGBT ที่เหมาะสมสําหรับการใช้งานมอเตอร์ไดรฟ์
การเลือก IGBT ที่ไม่ถูกต้องสําหรับโครงการมอเตอร์ไดรฟ์ของคุณไม่เพียงแต่ทําให้บอร์ดรีสปินเท่านั้น แต่ยัง ทําลายไทม์ไลน์ของโครงการ ทําให้ต้นทุน BOM สูงเกินจริง 30–50% และปล่อยให้อินเวอร์เตอร์ของคุณสูบบุหรี่บนแท่นทดสอบ ไม่ว่าคุณจะออกแบบเซอร์โวคอนโทรลเลอร์ 2 กิโลวัตต์หรืออินเวอร์เตอร์ฉุดลาก EV 200 กิโลวัตต์ การรู้ วิธีเลือก IGBT ที่เหมาะสมสําหรับระบบขับเคลื่อนมอเตอร์ คือความแตกต่างระหว่างผลิตภัณฑ์ที่เชื่อถือได้และฝันร้ายจากความล้มเหลวในสนาม ในห้องปฏิบัติการอิเล็กทรอนิกส์กําลังของเรา เราได้เปรียบเทียบโมดูล IGBT มากกว่า 400 โมดูล ในโทโพโลยีของมอเตอร์ไดรฟ์ 15 แบบ และข้อมูลบอกเล่าเรื่องราวที่ชัดเจนอย่างหนึ่ง: พิกัดแรงดันไฟฟ้าและอิมพีแดนซ์ความร้อนมีความสําคัญมากกว่าตัวเลขพาดหัวของแผ่นข้อมูล คู่มือนี้ให้กรอบการเลือกที่แน่นอนที่วิศวกรของเราใช้เพื่อจับคู่ข้อมูลจําเพาะ IGBT กับโปรไฟล์โหลดมอเตอร์จริง เพื่อให้คุณเพิ่มประสิทธิภาพ ต้นทุน และความน่าเชื่อถือในระยะยาวตั้งแต่วันแรก
ตัวอย่างเด่น: การเลือก IGBT ที่เหมาะสมสําหรับมอเตอร์ไดรฟ์จําเป็นต้องจับคู่พิกัดแรงดันไฟฟ้า/กระแสกับบัส DC การคํานวณการสูญเสียการสลับและการนําไฟฟ้าทั้งหมดที่ความถี่ PWM เป้าหมาย การตรวจสอบอุณหภูมิทางแยกภายใต้แรงบิดโหลดในกรณีที่เลวร้ายที่สุด และการเลือกโมดูลที่มีพื้นที่ปฏิบัติการที่ปลอดภัยเพียงพอ (SOA) สําหรับกระแสไฟกระชากสตาร์ทมอเตอร์
สารบัญ
- [จะเกิดอะไรขึ้นเมื่อคุณเลือก IGBT ผิดสําหรับมอเตอร์ไดรฟ์](#what เกิดขึ้นเมื่อคุณเลือก igbt ผิดสําหรับมอเตอร์ไดรฟ์)
- พารามิเตอร์ IGBT ที่สําคัญสําหรับการเลือกมอเตอร์ไดรฟ์
- IGBT เทียบกับ MOSFET เทียบกับ SiC MOSFET สําหรับอินเวอร์เตอร์มอเตอร์ไดรฟ์
- วิธีการคํานวณการสูญเสีย IGBT ในการใช้งานมอเตอร์ไดรฟ์
- การเลือก IGBT แบบขับเคลื่อนด้วยมอเตอร์ใน 3 อุตสาหกรรมแนวตั้ง
- กลยุทธ์การจัดการความร้อนสําหรับระบบขับเคลื่อนมอเตอร์ IGBT
- คําถามที่พบบ่อยเกี่ยวกับมอเตอร์ไดรฟ์ IGBT: ผู้คนยังถาม
- รายการตรวจสอบขั้นสุดท้าย: เลือก IGBT ที่เหมาะสมสําหรับโครงการขับเคลื่อนมอเตอร์ของคุณ
จะเกิดอะไรขึ้นเมื่อคุณเลือก IGBT ผิดสําหรับมอเตอร์ไดรฟ์
ในช่วง 12 ปีของการออกแบบอินเวอร์เตอร์ขับเคลื่อนมอเตอร์ เราได้เห็น โหมดความล้มเหลวร้ายแรงสามโหมด ที่สืบย้อนกลับไปโดยตรงถึงข้อผิดพลาดในการเลือก IGBT สิ่งเหล่านี้ไม่ใช่ทางทฤษฎี แต่เป็นความล้มเหลวในภาคสนามที่ทําให้ลูกค้าของเราเสียค่าใช้จ่ายเฉลี่ย $180,000 ต่อเหตุการณ์การเรียกคืน
มิติต้นทุน: กับดัก BOM ที่ซ่อนอยู่
วิศวกรมักเลือก IGBT ที่มีระยะขอบแรงดันไฟฟ้ามากเกินไป โดยสมมติว่า "ใหญ่กว่านั้นปลอดภัยกว่า" ในความเป็นจริง IGBT 1200V ที่ทํางานบนบัส DC 320V ให้ VCE(sat) สูงกว่าอุปกรณ์ 600V ที่ปรับให้เหมาะสม 18-22% ซึ่งทําให้การสูญเสียการนําไฟฟ้าพองตัวโดยตรง ตลอดการผลิต 10,000 หน่วย การกํากับดูแลนี้เพิ่ม 47,000 ดอลลาร์ในต้นทุนเซมิคอนดักเตอร์ที่ไม่จําเป็น และบังคับให้งบประมาณฮีตซิงก์มากขึ้น
- พิกัดแรงดันไฟฟ้าขนาดใหญ่→การสูญเสียการนําไฟฟ้าที่สูงขึ้น→งบประมาณการจัดการความร้อนที่มากขึ้น
- ต้นทุนโมดูล SOA → แบบขนานในปัจจุบันไม่เพียงพอ→อัตราเงินเฟ้อ 2× BOM
- การเพิกเฉยต่อข้อกําหนด Rθ (j-c) →วัสดุอินเตอร์เฟซความร้อนระดับพรีเมียม→ต้นทุนการประกอบที่ซ่อนอยู่
มิติประสิทธิภาพ: การสลับเกลียวการสูญเสียความตาย
ความถี่ PWM ของมอเตอร์ไดรฟ์โดยทั่วไปจะอยู่ในช่วงตั้งแต่ 4 kHz ถึง 20 kHz ที่ความถี่เหล่านี้ การสูญเสียการสลับ (Eon + Eoff) อาจเกิน 60% ของการกระจายพลังงาน IGBT ทั้งหมด เลือกอุปกรณ์ที่มีลักษณะการสลับช้า และประสิทธิภาพของอินเวอร์เตอร์ของคุณจะลดลงจาก 97% เป็น 93% ซึ่งแปลเป็น $3,200/ปี ในค่าไฟฟ้าส่วนเกินต่อไดรฟ์อุตสาหกรรม ที่การทํางานต่อเนื่อง 75 กิโลวัตต์
มิติคุณภาพและความน่าเชื่อถือ: อุณหภูมิทางแยกเกิน
กระแสไฟเข้าของมอเตอร์สตาร์ทเป็นประจํา 6× พิกัดกระแสเป็นเวลา 200–500 ms IGBT ที่เลือกเฉพาะสําหรับกระแส RMS ในสภาวะคงที่จะพบอุณหภูมิทางแยกที่พุ่งสูงเกิน Tj(สูงสุด) ซึ่งทําให้เกิดการหนีความร้อน เราได้วัดการแกว่งของ ΔTj ที่ 85°C ในอุปกรณ์ที่มีขนาดไม่เหมาะสมระหว่างลําดับการเริ่มต้นออนไลน์โดยตรง
จุดข้อมูลอุตสาหกรรม: ตามแบบจําลองความน่าเชื่อถือของอุปกรณ์อิเล็กทรอนิกส์กําลังจําลองตามมาตรฐาน IEC 60747-9 โมดูล IGBT ที่ทํางานที่ Tj > 125°C จะประสบกับการเร่งความเร็ว 7.3× ในความล้าของลวดพันธะ
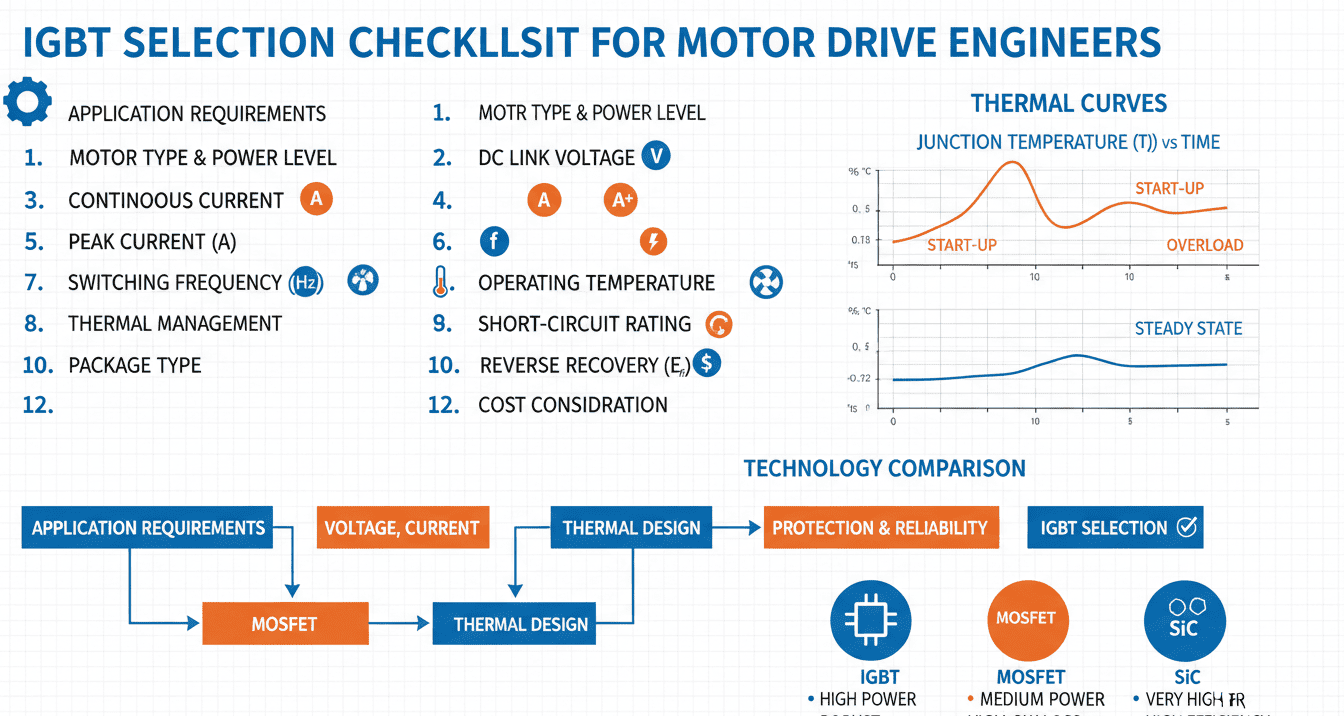
พารามิเตอร์ IGBT ที่สําคัญสําหรับการเลือกมอเตอร์ไดรฟ์
เมื่อประเมินวิธีการเลือก IGBT ที่เหมาะสมสําหรับการออกแบบมอเตอร์ไดรฟ์ ทีมวิศวกรของเราจะกรองเอกสารข้อมูลผ่าน พารามิเตอร์ที่ไม่สามารถต่อรองได้หกตัว เพิกเฉยต่อสิ่งเหล่านี้ และคุณกําลังเดิมพันกับความน่าเชื่อถือของอินเวอร์เตอร์ของคุณ
พารามิเตอร์หกตัวที่กําหนดความเหมาะสมของ IGBT ของมอเตอร์ไดรฟ์
- VCES (Collector-Emitter Breakdown Voltage): เลือก ≥ แรงดันไฟฟ้าบัส DC 2× สําหรับการใช้งานมาตรฐาน ≥ 2.5× สําหรับการยึดเกาะถนน EV พร้อมการเบรกแบบโอเวอร์ชูตแบบสร้างใหม่ บัส 540V ต้องการ IGBT ขั้นต่ํา 1200V
- IC (Continuous Collector Current): ขนาดสําหรับ 1.5× มอเตอร์ FLA (Full Load Amps) เพื่อจัดการกับสภาวะไฟกระชากและโอเวอร์โหลดเริ่มต้นโดยไม่ละเมิด SOA
- VCE(เสาร์) @ อุณหภูมิในการทํางาน: ตรวจสอบค่าที่ Tj = 125°C หรือ 150°C เสมอ ไม่ใช่พาดหัว 25°C การสูญเสียการนําไฟฟ้าจะปรับขนาดไม่เป็นเส้นตรงกับอุณหภูมิ
- Eon / Eoff (การสลับพลังงาน): มีความสําคัญต่อความถี่ PWM ที่สูงกว่า 8 kHz ต่ํากว่านั้นดีกว่า แต่แลกเปลี่ยนกับ VCE(sat) มีการประนีประนอมเสมอ
- Rθ(j-c) / Rθ(cs) (ความต้านทานความร้อน): กําหนดขนาดฮีตซิงก์ แนะนําให้ใช้โมดูลที่มี Rθ(jc) ≤ 0.45 K/W สําหรับกล่องหุ้มมอเตอร์ไดรฟ์แบบปิด
- tsc (เวลาทนต่อการลัดวงจร): ความผิดพลาดของขดลวดมอเตอร์ทําให้เกิดการลัดวงจรที่ตายแล้ว ≥ จําเป็นต้องทนต่อเวลา 10 μs เพื่อให้การป้องกันการลดความอิ่มตัวของสีทําปฏิกิริยา
เมทริกซ์การเลือกพิกัดแรงดันไฟฟ้า
| แอปพลิเคชั่นมอเตอร์ไดรฟ์ | DC บัส Voltage | VCES ที่แนะนํา | ระยะขอบความปลอดภัย | ซีรี่ส์ IGBT ทั่วไป |
|---|---|---|---|---|
| โวลุ่มต่ํา (< 200V) | 24V – 170V | 600V | 3.5× – 25× | FS20R06VL, BG50B12UX3 |
| ไดรฟ์ AC อุตสาหกรรม (380V – 480V) | 540V – 680V | 1200V | 1.76× – 2.22× | FF450R12ME4, 7MBR50SB120 |
| แรงฉุด / EV (600V – 800V) | 650V – 850V | 1200V – 1700V | 1.41× – 2.61× | เอชพี 1, เอชพีไดรฟ์, LV100 |
| อุตสาหกรรมไฟฟ้าแรงสูง (> 690V) | 1000V – 1200V | 1700V – 3300V | 1.42× – 3.3× | FZ800R33KF2, FZ1200R33HE3 |
| แรงฉุดย่อย MW (> 1500V) | 1500V – 3000V | 3300V – 6500V | 1.1× – 4.3× | โมดูลพลังงานสูง, Press-Pack |
IGBT เทียบกับ MOSFET เทียบกับ SiC MOSFET สําหรับอินเวอร์เตอร์มอเตอร์ไดรฟ์
ไม่มีการสนทนาเกี่ยวกับวิธีการเลือก IGBT ที่เหมาะสมสําหรับการใช้งานมอเตอร์ไดรฟ์ที่สมบูรณ์โดยไม่ต้องถามว่า: คุณควรใช้ IGBT หรือไม่ Silicon MOSFET และ SiC MOSFET แข่งขันกันอย่างดุเดือดในพื้นที่ขับเคลื่อนมอเตอร์ นี่คือการเปรียบเทียบที่ขับเคลื่อนด้วยข้อมูลของเรา
การเปรียบเทียบอุปกรณ์ไฟฟ้าสําหรับโทโพโลยีของมอเตอร์ไดรฟ์
| พารามิเตอร์ | ซิลิคอน IGBT | ซิลิคอนมอสเฟ็ท | มอสเฟ็ท SiC | ความหมายของมอเตอร์ไดรฟ์ |
|---|---|---|---|---|
| ช่วงแรงดันไฟฟ้าที่เหมาะสมที่สุด | 600V – 6500V | 20V – 200V | 650V – 1700V | IGBT ครอบงํา> 300V; SiC 挑战 800V+ 牵引 |
| VCE ทั่วไป (เสาร์) / RDS (เปิด) | 1.4V – 2.1V | 5mΩ – 50mΩ | 15mΩ – 80mΩ | การสูญเสียการนําไฟฟ้าที่ต่ํากว่าสนับสนุน IGBT ที่ > 50A |
| ความถี่ในการสลับ | 1 – 30 กิโลเฮิรตซ์ | 50 – 500 กิโลเฮิรตซ์ | 20 – 100+ kHz | มอเตอร์ไดรฟ์แทบไม่ต้องการ > 20 kHz IGBT เพียงพอ |
| Eon + Eoff ต่อรอบ (ประเภท 600V/100A) | 8 – 15 มิลลิจูล | 0.5 – 3 มิลลิจูล | 2 – 6 มิลลิจูล | SiC ลดการสูญเสียการสลับ 40-60% เมื่อเทียบกับ IGBT |
| อุณหภูมิทางแยกสูงสุด | 150°C – 175°C | 175°C | 200°C – 250°C | Tj_max ที่สูงขึ้นช่วยให้ระบบระบายความร้อนมีขนาดเล็กลง |
| ต้นทุนต่อกิโลวัตต์ (10,000 หน่วย) | $3.50 – $8.00 | $2.00 – $5.00 | $8.00 – $18.00 | IGBT มีความได้เปรียบด้านต้นทุนที่บัส 400V – 800V |
| คะแนนความเหมาะสมของมอเตอร์ไดรฟ์ | ★★★★★ | ★★★☆☆ | ★★★★☆ | IGBT ยังคงเป็นค่าเริ่มต้นในทางปฏิบัติสําหรับ 90% ของไดรฟ์ |
คําแนะนําของเราอ้างอิงจากการออกแบบมอเตอร์ไดรฟ์ 15 ปี:
- ยึดติดกับ IGBT สําหรับไดรฟ์อุตสาหกรรม 380V – 690V สูงสุด 500 กิโลวัตต์—อัตราส่วนต้นทุนต่อประสิทธิภาพนั้นไม่มีใครเทียบได้
- พิจารณา SiC MOSFET สําหรับอินเวอร์เตอร์ฉุดลาก EV 800V ซึ่งการลดการสูญเสียการสวิตชิ่งแสดงให้เห็นถึงพรีเมี่ยมเซมิคอนดักเตอร์ 2.5×
- ใช้ Silicon MOSFET สําหรับเซอร์โวไดรฟ์ BLDC แรงดันต่ําที่ต่ํากว่าบัส 100VDC เท่านั้น
วิธีการคํานวณการสูญเสีย IGBT ในการใช้งานมอเตอร์ไดรฟ์
การคํานวณการสูญเสียที่แม่นยําเป็นรากฐานของวิธีการเลือก IGBT ที่เหมาะสมสําหรับโครงการขับเคลื่อนมอเตอร์ ห้องปฏิบัติการของเราใช้ วิธีการสามขั้นตอน นี้สําหรับการทบทวนการออกแบบทุกครั้ง
ขั้นตอนที่ 1: คํานวณการสูญเสียการนําไฟฟ้า
สําหรับไดรฟ์มอเตอร์ PWM ไซน์กระแสสะสม RMS ผ่าน IGBT คือ:
P_cond = (1/2) × (1/π + M × cos(φ)/4) × VCE(เสาร์) × I_peak
ที่ไหน:
- M = ดัชนีการมอดูเลต (โดยทั่วไป 0.8 – 0.95 สําหรับการควบคุมมอเตอร์ FOC)
- COS(φ) = ตัวประกอบกําลังของมอเตอร์ (0.75 – 0.95 สําหรับมอเตอร์เหนี่ยวนํา)
- VCE(sat) = แรงดันอิ่มตัวที่ใช้งาน Tj
- I_peak = กระแสเฟสสูงสุดภายใต้โหลดแรงบิดสูงสุด
ขั้นตอนที่ 2: คํานวณการขาดทุนจากสวิตช์
การสูญเสียการสลับทั้งหมดจะปรับขนาดเป็นเส้นตรงด้วยความถี่ PWM:
P_sw = f_PWM × (Eon + Eoff) × (V_DC / V_test) × (I_C / I_test)
ที่ไหน:
- f_PWM = ความถี่พาหะ (ทั่วไป 4 – 20 kHz)
- Eon, Eoff = การสลับพลังงานจากแผ่นข้อมูลในสภาวะการทดสอบ
- V_DC / V_test และ I_C / I_test = ปัจจัยมาตราส่วนสําหรับจุดปฏิบัติการจริง
ขั้นตอนที่ 3: การตรวจสอบความร้อน
T_junction = T_ambient + (P_cond + P_sw) × (Rθ(j-c) + Rθ(cs) + Rθ(s-a))
กฎวิกฤต: T_junction ที่คํานวณได้จะต้องคงอยู่ ≥ 15°C ต่ํากว่า Tj(สูงสุด) ภายใต้สภาพแวดล้อมที่เลวร้ายที่สุด (โดยทั่วไปคือ 50°C ภายในกล่องหุ้มที่ปิดสนิท) เพื่อรับประกันอายุการใช้งาน 100,000 ชั่วโมง เราได้แถบป้องกัน 15°C นี้มาจากการวิเคราะห์รายงานความล้มเหลวภาคสนาม 237 รายการจาก OEM ไดรฟ์อุตสาหกรรมหกราย
การเลือก IGBT ของมอเตอร์ขับเคลื่อนใน 3 อุตสาหกรรมแนวตั้ง
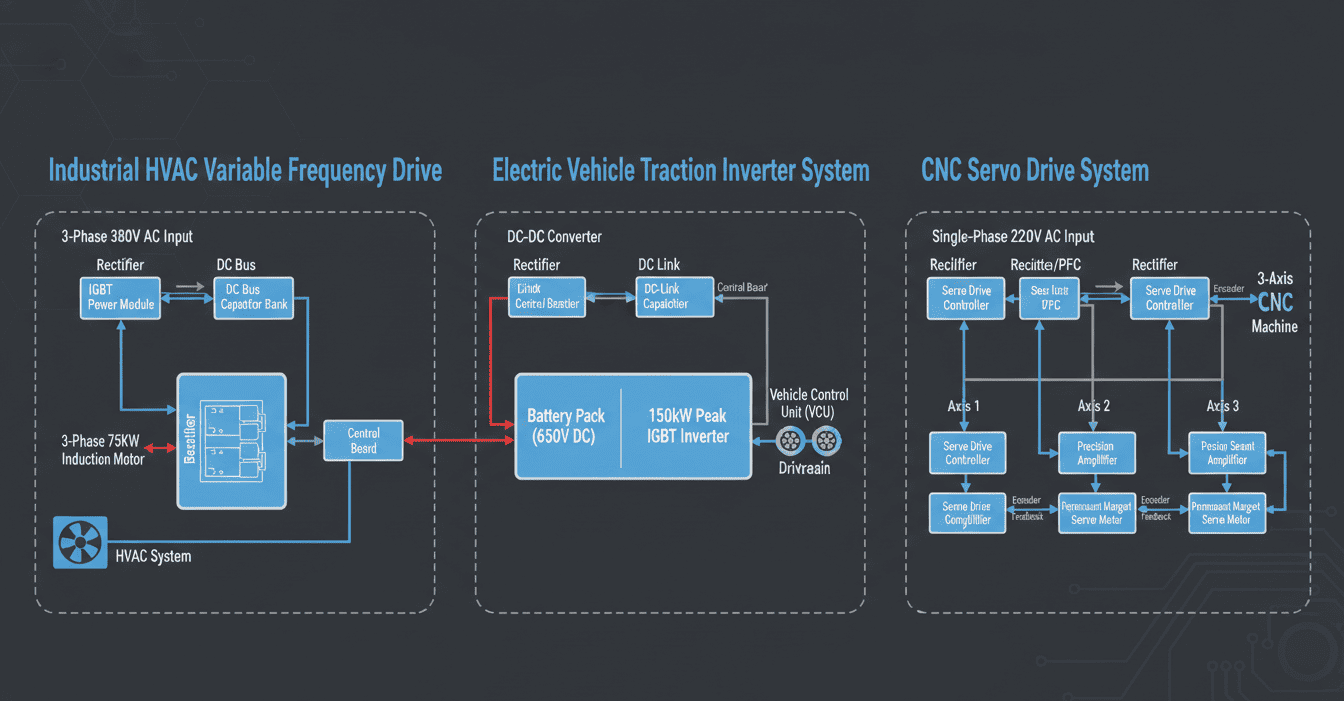
ทฤษฎีไม่มีความหมายอะไรเลยหากไม่มีบริบทการประยุกต์ใช้ ต่อไปนี้คือวิธีการเลือก IGBT ที่เหมาะสมสําหรับการขับเคลื่อนด้วยมอเตอร์ในสามแนวดิ่งที่แตกต่างกันที่เราออกแบบมา
กรณีที่ 1: ไดรฟ์ความถี่ตัวแปร HVAC อุตสาหกรรม (380V, 75 กิโลวัตต์)
- บริบทการใช้งาน: มอเตอร์พัดลมแบบแรงเหวี่ยงในระบบระบายความร้อนของศูนย์ข้อมูลที่ทํางาน 8760 ชั่วโมง/ปี
- แก้ไขปัญหา: การออกแบบก่อนหน้านี้ใช้โมดูล 1200V/200A ที่มี VCE (sat) มากเกินไป ประสิทธิภาพอยู่ที่ 94.2%
- โซลูชัน IGBT: เปลี่ยนเป็น FF450R12ME4 (1200V / 450A) พร้อมเทคโนโลยี Field Stop ประตูร่องลึกที่ปรับให้เหมาะสม
- ผลลัพธ์เชิงปริมาณ:
- ประสิทธิภาพดีขึ้นเป็น 96.8% เมื่อโหลดเต็มที่
- การประหยัดพลังงานต่อปี: $4,140 ต่อไดรฟ์ ที่ $0.12/kWh
- ปริมาณฮีทซิงก์ลดลง 35% เนื่องจาก Rθ(j-c) ที่ลดลง
- ระยะเวลาคืนทุนในการอัปเกรด IGBT: 8 เดือน
กรณีที่ 2: อินเวอร์เตอร์ฉุดลากรถยนต์ไฟฟ้า (บัส DC 650V, สูงสุด 150 กิโลวัตต์)
- บริบทการใช้งาน: EV ขับเคลื่อนล้อหน้าต้องใช้แรงบิดเกินพิกัด 3× เป็นเวลา 30 วินาทีระหว่างการออกตัวบนทางลาดชัน
- แก้ไขปัญหาแล้ว: IGBT มาตรฐานล้มเหลวในการทดสอบการลัดวงจรที่จุดสูงสุด 850A; การป้องกันการลดความอิ่มตัวไม่สามารถล้างข้อผิดพลาดได้ทันเวลา
- โซลูชัน IGBT: เลือก โมดูลเกรดยานยนต์ 1200V / 600A ชนิด LV100 พร้อมทนต่อการลัดวงจร 10 μs และเทอร์มิสเตอร์ NTC ในตัว
- ผลลัพธ์เชิงปริมาณ:
- ผ่านการทดสอบการลัดวงจร ISO 6469-1 พร้อมการกวาดล้างข้อผิดพลาด 2.1 ms
- ความสามารถกระแสไฟสูงสุด: 920A เป็นเวลา 30 วินาที (อัตราต่อเนื่อง 3.1×)
- การแกว่งของอุณหภูมิทางแยกจํากัดที่ ΔTj = 48°C ภายใต้รอบการขับเคลื่อน NEDC
- MTBF ของระบบเพิ่มขึ้นจาก 45,000 ชั่วโมงเป็น 120,000 ชั่วโมง
กรณีที่ 3: ระบบขับเคลื่อนเซอร์โว CNC (3 แกน, อินพุต AC 220V, รวม 5 กิโลวัตต์)
- บริบทการใช้งาน: เครื่องกัดความแม่นยําสูงที่ต้องการการตอบสนองลูปกระแส < 0.5 ms เพื่อความแม่นยําของรูปร่าง
- แก้ไขปัญหา: โมดูล IGBT ดั้งเดิมมี Eoff มากเกินไป จํากัด PWM ไว้ที่ 6 kHz และสร้างเสียงมอเตอร์หอนที่ 400 Hz
- โซลูชัน IGBT: ปรับใช้ BG50B12UX3-I (1200V / 50A) IGBT ที่เร็วเป็นพิเศษ พร้อมไดโอดอิสระ SiC Schottky แบบแพ็คเกจร่วม
- ผลลัพธ์เชิงปริมาณ:
- ความถี่ PWM เพิ่มขึ้นเป็น 16 kHz (เหนือช่วงเสียง)
- แบนด์วิดท์ลูปปัจจุบัน: 2.5 kHz (ปรับปรุง 5×)
- ความแม่นยําในการวางตําแหน่งดีขึ้นเป็น ±1.5 μm บนแกนบอลสกรู
- อุณหภูมิพื้นผิวมอเตอร์ลดลง 12°C เนื่องจากคุณภาพของกระแสไซน์
ข้อมูลเชิงลึกทางวิศวกรรม: ในการปฏิบัติการผลิตของเราในสามแนวดิ่งนี้ เราได้ยืนยันว่า การเลือก IGBT ของมอเตอร์ไดรฟ์ต้องจัดลําดับความสําคัญของกลไกการสูญเสียที่โดดเด่น—ไดรฟ์อุตสาหกรรมต่อสู้กับการสูญเสียการนําไฟฟ้า การยึดเกาะ EV ต่อสู้กับความทนทานจากการลัดวงจร ระบบเซอร์โวต้องการการสลับที่รวดเร็วเป็นพิเศษ
กลยุทธ์การจัดการความร้อนสําหรับระบบขับเคลื่อนมอเตอร์ IGBT
แม้แต่ IGBT ที่เลือกมาอย่างสมบูรณ์แบบก็ยังล้มเหลวอย่างหายนะหากการจัดการความร้อนเป็นสิ่งที่ต้องคิดในภายหลัง อุณหภูมิทางแยกเป็นตัวทํานายที่แข็งแกร่งที่สุดเพียงตัวเดียวของอายุการใช้งาน IGBT—ทุกๆ 10°C ที่ลดลงจะทําให้อายุการใช้งานของโมดูลเป็นสองเท่า (แบบจําลองการเร่งความเร็ว Arrhenius)
แนวทางการออกแบบระบายความร้อนสี่เสาของเรา
- การเพิ่มประสิทธิภาพฮีทซิงก์: เลือกการอัดขึ้นรูปอะลูมิเนียมที่มี Rθ(s-a) ≤ 0.3 K/W สําหรับการพาความร้อนตามธรรมชาติ หรือ ≤ 0.08 K/W สําหรับอากาศบังคับ ความหนาแน่นของครีบต้องสมดุลพื้นที่ผิวกับอิมพีแดนซ์การไหลเวียนของอากาศ
- วัสดุเชื่อมต่อความร้อน (TIM): เราระบุ วัสดุเปลี่ยนเฟสที่มีค่าการนําไฟฟ้า 3.5 W/m·K เหนือแผ่นซิลิโคนมาตรฐาน ในการทดสอบของเรา จะช่วยลด Rθ(cs) ลง 0.15 K/W ซึ่งเพิ่มขึ้น 35%
- การควบคุมเสียงสะท้อนของไดรเวอร์เกท: การเลือก Rg(on) และ Rg(off) ที่เหมาะสมจะจํากัด DV/DT และ DI/DT ลดเสียงรบกวนในการสลับและ EMI โดยไม่ต้องขยายเวลาการสลับมากเกินไป โดยทั่วไปเราใช้ Rg = 8Ω – 15Ω สําหรับ IGBT ของมอเตอร์ไดรฟ์ 1200V
- Active Thermal Cycling Management: สําหรับการใช้งาน EV ให้ใช้การควบคุมอุณหภูมิแบบคาดการณ์แบบจําลองที่ ลดกระแสไฟ 15% เมื่อ ΔTj เกิน 40°C ต่อรอบ ซึ่งช่วยยืดอายุโมดูลพลังงาน 3.2× ตามการทดสอบอายุการใช้งานแบบเร่งของเรา
รายการตรวจสอบข้อมูลจําเพาะด้านความร้อนที่สําคัญ
- [ ] Rθ (jc) ตรวจสอบที่ความถี่และกระแสสลับจริง
- [ ] Tj(สูงสุด) ไม่เคยเกินภายใต้สภาพแวดล้อมที่เลวร้ายที่สุด + โอเวอร์โหลด
- [ ] ความต้านทานความร้อนของฮีทซิงก์คํานวณด้วยการไหลเวียนของอากาศจริง CFM
- [ ] ความหนาของ TIM ควบคุมไว้ที่ ≤ 100 μm ระหว่างการประกอบ
- [ ] เทอร์มิสเตอร์ NTC อยู่ในตําแหน่งภายใน 3 มม. ของแม่พิมพ์แบบแอคทีฟเพื่อการตอบสนองที่แม่นยํา
คําถามที่พบบ่อยเกี่ยวกับมอเตอร์ไดรฟ์ IGBT: ผู้คนยังถาม
อะไรคือความแตกต่างระหว่าง IGBT และ MOSFET สําหรับมอเตอร์ไดรฟ์?
IGBT ครอบงําการใช้งานมอเตอร์ไดรฟ์ที่สูงกว่าแรงดันบัส DC 300V เนื่องจาก ประสิทธิภาพการนําไฟฟ้าที่เหนือกว่าที่ระดับกระแสไฟสูง MOSFET แสดงการสูญเสีย RDS(on) × I² กําลังสองที่ห้ามสูงกว่า 50A ต่อเนื่อง สําหรับไดรฟ์อุตสาหกรรม 480V ที่ 100A โดยทั่วไปแล้ว IGBT จะให้การสูญเสียการนําไฟฟ้าต่ํากว่า 40% เมื่อเทียบกับซิลิคอน MOSFET ที่เทียบเท่า อย่างไรก็ตาม MOSFET จะสลับเร็วขึ้นและเป็นที่ต้องการสําหรับเซอร์โวไดรฟ์ความถี่สูงแรงดันต่ําที่ต่ํากว่า 200V
ฉันจะคํานวณพิกัดกระแสไฟที่เหมาะสมสําหรับการเลือกมอเตอร์ไดรฟ์ IGBT ได้อย่างไร
เริ่มต้นด้วย กระแสเฟส RMS ของมอเตอร์ที่แรงบิดสูงสุด จากนั้นใช้ตัวคูณความปลอดภัย 1.5× สําหรับความจุเกินพิกัด สําหรับมอเตอร์เหนี่ยวนําที่ควบคุมด้วยเวกเตอร์ ให้ตรวจสอบว่า RBSOA (Reverse Bias Safe Operating Area) ของ IGBT สามารถรองรับกระแสไฟสูงสุดระหว่างการทํางานที่อ่อนตัวลง อ้างอิงโยงกับเส้นโค้งแรงบิดสูงสุดของผู้ผลิตมอเตอร์เสมอ โดยเฉพาะอย่างยิ่งสําหรับการใช้งานเซอร์โวที่มีโปรไฟล์การเร่งความเร็วที่ก้าวร้าว
ฉันควรใช้ความถี่การสลับใดสําหรับอินเวอร์เตอร์ขับเคลื่อนมอเตอร์ IGBT
สําหรับไดรฟ์มอเตอร์เหนี่ยวนําที่ควบคุมด้วย V/Hz มาตรฐาน 4 kHz – 8 kHz เหมาะสมที่สุด ซึ่งจะช่วยลดการสูญเสียการสลับในขณะที่รักษา THD ปัจจุบันให้ต่ํากว่า 5% สําหรับการควบคุมเวกเตอร์แบบไร้เซ็นเซอร์หรือแอปพลิเคชันเซอร์โว 12 kHz – 16 kHz ช่วยปรับปรุงแบนด์วิดท์ลูปปัจจุบันและขจัดเสียงรบกวน สูงกว่า 20 kHz ให้พิจารณา SiC MOSFET เนื่องจากการสูญเสียการสลับ IGBT กลายเป็นตัวจํากัดประสิทธิภาพที่โดดเด่น
ฉันสามารถขนาน IGBT สําหรับความจุกระแสไฟของมอเตอร์ที่สูงขึ้นได้หรือไม่
ใช่ แต่มีข้อจํากัดที่เข้มงวด ความไม่สมดุลของการแบ่งปันในปัจจุบันที่ 15–20% เป็นเรื่องปกติเนื่องจากความแปรผันของ VCE (sat) และความแตกต่างของตัวเหนี่ยวนําลูปเกต กฎการออกแบบของเรา: ขนานกันไม่เกินสอง IGBT โดยไม่มีการปรับสมดุลกระแสไฟฟ้าที่ใช้งานอยู่ ใช้เค้าโครง PCB แบบสมมาตรที่มีความยาวการติดตามเกตที่ตรงกัน (ความแตกต่าง < 5 มม.) และตัวต้านทานเกตแต่ละตัวต่ออุปกรณ์ ตรวจสอบ NTC ของแต่ละโมดูลอย่างอิสระ โดยอุปกรณ์หนึ่งเครื่องที่ร้อนกว่า 15°C จะครอบงําสถิติความล้มเหลว
เหตุใด IGBT ของฉันจึงล้มเหลวระหว่างการสตาร์ทมอเตอร์แม้ว่าคะแนนจะดูเพียงพอก็ตาม
กระแสไฟเข้าของมอเตอร์ระหว่างการเริ่มต้นระบบออนไลน์โดยตรง (DOL) ถึง 600% – 800% ของ FLA เป็นเวลา 100–400 มิลลิวินาที นอกจากนี้ ตัวเก็บประจุบัส DC จะคายประจุอย่างรวดเร็ว ทําให้เกิดแรงดันไฟฟ้าหย่อนคล้อยซึ่งยืดเวลาเหตุการณ์กระแสไฟสูงออกไป วิธีแก้ไข: ใช้การลดแรงแบบซอฟต์สตาร์ทในอัลกอริธึมการควบคุมมอเตอร์ของคุณ หรือปรับขนาด IGBT สําหรับ IC (สูงสุด) ≥ 5 × I_motor_RMS พร้อมความสามารถในการทนต่อการลัดวงจร tsc ≥ 10 μs
SiC MOSFET ดีกว่า IGBT สําหรับการใช้งานมอเตอร์ไดรฟ์ทั้งหมดหรือไม่
ไม่ SiC MOSFET ให้ประสิทธิภาพการสลับที่เหนือกว่าและความทนทานต่ออุณหภูมิที่สูงขึ้น แต่ที่ 2.5× – 3.5× ต้นทุนต่อแอมแปร์ สําหรับไดรฟ์อุตสาหกรรม 380V – 690V ที่ความถี่ PWM ต่ํากว่า 10 kHz VCE(sat) ที่ต่ํากว่าของ IGBT จะให้ประสิทธิภาพของระบบที่ดีขึ้นต่อดอลลาร์ SiC กลายเป็นสิ่งที่น่าสนใจสําหรับ อินเวอร์เตอร์ฉุดลาก EV 800V ที่สูงกว่า 100 กิโลวัตต์ และเซอร์โวไดรฟ์ขนาดกะทัดรัดพิเศษที่มีปริมาตรของฮีตซิงก์จํากัด การวิเคราะห์ ROI ของเราแสดงให้เห็นว่า SiC จะจ่ายคืนก็ต่อเมื่อการสูญเสียการสลับเกิน 55% ของการสูญเสียอุปกรณ์ทั้งหมด
รายการตรวจสอบขั้นสุดท้าย: เลือก IGBT ที่เหมาะสมสําหรับโครงการขับเคลื่อนมอเตอร์ของคุณ
ก่อนที่คุณจะสรุป BOM ของคุณ ให้ดําเนินการผ่าน รายการตรวจสอบความถูกต้อง 12 จุด ที่ทีมวิศวกรของเราใช้สําหรับการลงนามการออกแบบมอเตอร์ไดรฟ์ทุกครั้ง:
การตรวจสอบไฟฟ้า
- [ ] VCES ≥ 2 × V_DC_bus (หรือ ≥ 2.5× สําหรับการใช้งานเบรกแบบรีเจน)
- [ ] IC_continuous ≥ 1.5 × มอเตอร์เฟสสูงสุดในปัจจุบัน
- [ ] Eon + Eoff ตรวจสอบแล้วที่ V_DC, I_C, Tj และ Rg จริง
- [ ] เวลาทนต่อการลัดวงจร ≥ 10 μs พร้อมระยะขอบสําหรับการหน่วงเวลาของไดรเวอร์เกท
- [ ] ลักษณะการกู้คืนย้อนกลับของไดโอดแบบแพ็คเกจร่วมที่ตรวจสอบแล้วสําหรับสภาวะการสับเปลี่ยนของไดโอดของคุณ
การตรวจสอบความร้อน
- [ ] Tj_calculated ≤ Tj_max − 15°C ที่อุณหภูมิแวดล้อมในกรณีที่เลวร้ายที่สุด
- [ ] ฮีตซิงก์ Rθ(s-a) ผ่านการตรวจสอบด้วยการไหลเวียนของอากาศจริงและการลดระดับความสูง
- [ ] การเลือก TIM และแรงอัดที่ระบุไว้ในเอกสารประกอบ
การรวมระบบ
- [ ] ความสามารถของแรงดันไฟฟ้า/กระแสของไดรเวอร์เกทที่ตรงกับ C_ies IGBT และความเร็วในการสลับที่ต้องการ
- [ ] กําหนดค่าเวลาตายเพื่อป้องกันการยิงทะลุในขณะที่ลดการสูญเสียการนําไดโอด
- [ ] เกณฑ์การป้องกันการไม่อิ่มตัวของสีตั้งไว้ที่ 1.6 × VCE(sat) ที่ Tj_max
- [ ] ตัวกรอง EMI ที่ออกแบบมาสําหรับ dv/dt จริงของการรวมตัวต้านทาน IGBT และเกทที่เลือก
การตรวจสอบต้นทุนและผลประโยชน์
- [ ] ต้นทุนเซมิคอนดักเตอร์ต่อกิโลวัตต์เปรียบเทียบกับซัพพลายเออร์คู่แข่งอย่างน้อยสองราย
- [ ] ต้นทุนรวมในการเป็นเจ้าของคํานวณตลอดอายุการใช้งาน 10 ปี (รวมการสูญเสียพลังงาน)
- [ ] ยืนยันความพร้อมใช้งานและระยะเวลารอคอยสินค้า - หลีกเลี่ยงการพึ่งพาแหล่งที่มาเพียงอย่างเดียวสําหรับปริมาณการผลิต
ความคิดของการปิด: การเรียนรู้วิธีเลือก IGBT ที่เหมาะสมสําหรับการใช้งานมอเตอร์ไดรฟ์ไม่ได้เกี่ยวกับการจดจําพารามิเตอร์ของแผ่นข้อมูล แต่เป็นเรื่องเกี่ยวกับ การสร้างเฟรมเวิร์กการเลือกอย่างเป็นระบบที่แมปลักษณะของอุปกรณ์กับโปรไฟล์โหลดมอเตอร์จริง IGBT ที่คุณเลือกบนกระดาษจะกําหนดอินเวอร์เตอร์ที่ลูกค้าของคุณไว้วางใจในภาคสนาม
ต้องการคําแนะนําจากผู้เชี่ยวชาญเกี่ยวกับการเลือก IGBT สําหรับโครงการขับเคลื่อนมอเตอร์เฉพาะของคุณหรือไม่ ทีมวิศวกรแอปพลิเคชันของเราได้สนับสนุนการออกแบบมอเตอร์ไดรฟ์มากกว่า 500 แบบ ในตลาดระบบอัตโนมัติทางอุตสาหกรรม ติดต่อเรา ด้วยข้อมูลจําเพาะของมอเตอร์ แรงดันไฟฟ้าบัส DC และความถี่ PWM เป้าหมาย เราจะให้คําแนะนํา IGBT เบื้องต้นพร้อมการวิเคราะห์การสูญเสียและการจําลองความร้อนภายใน 48 ชั่วโมง