

คู่มือฉบับสมบูรณ์สําหรับการเลือกตัวเหนี่ยวนําในการออกแบบ PCB: พารามิเตอร์ ข้อผิดพลาด และแนวทางปฏิบัติที่ดีที่สุด
ตัวแปลงบั๊กที่ล้มเหลวทุกห่วงโซ่สัญญาณที่มีเสียงดังทุกฮอตสปอตความร้อนบนเค้าโครง PCB มักจะสามารถสืบย้อนกลับไปถึงส่วนประกอบที่ถูกมองข้ามได้: ตัวเหนี่ยวนํา ในแนวทางปฏิบัติในการผลิตของเราที่ครอบคลุมการออกแบบตัวควบคุมสวิตชิ่งมากกว่า 500+ แบบ เราได้สังเกตว่า 34% ของความล้มเหลวของแหล่งจ่ายไฟ เกิดจากการเลือกหรือการจัดวางตัวเหนี่ยวนําที่ไม่เหมาะสม
ไม่ว่าคุณจะออกแบบโหนดเซ็นเซอร์ IoT ขนาดกะทัดรัด ตัวแปลง DC-DC ในยานยนต์ที่มีกระแสไฟสูง หรือส่วนหน้า RF ที่มีข้อกําหนด EMI ที่เข้มงวด การเลือกตัวเหนี่ยวนําที่เชี่ยวชาญนั้นไม่สามารถต่อรองได้ คู่มือนี้นําเสนอกรอบการทํางานที่สมบูรณ์สําหรับการเลือกตัวเหนี่ยวนําที่เหมาะสมการคํานวณพารามิเตอร์ที่สําคัญและหลีกเลี่ยงข้อผิดพลาดที่มีค่าใช้จ่ายสูงซึ่งทําให้ทีมวิศวกรที่มีประสบการณ์ตกราง
ตัวอย่างเด่น: การเลือกตัวเหนี่ยวนําในการออกแบบ PCB จําเป็นต้องมีค่าความเหนี่ยวนํา กระแสอิ่มตัว (ISAT) กระแสไฟที่เพิ่มขึ้นของอุณหภูมิ (IRMS) และความต้านทานกระแสตรง (DCR) กับความถี่การสลับ กระแสโหลด และข้อจํากัดด้านความร้อนของแอปพลิเคชัน ในขณะที่มั่นใจได้ถึงการจัดวาง PCB ที่เหมาะสมเพื่อลด EMI และเพิ่มประสิทธิภาพสูงสุด
สารบัญ
- 1. ค่าใช้จ่ายแอบแฝงของการเลือกตัวเหนี่ยวนําที่ไม่ถูกต้อง
- 2. พารามิเตอร์ตัวเหนี่ยวนําหลักที่นักออกแบบ PCB ทุกคนต้องเชี่ยวชาญ
- 3. ตัวเหนี่ยวนําแบบหุ้มฉนวนกับตัวเหนี่ยวนําที่ไม่มีฉนวนหุ้ม: การเลือกที่ถูกต้อง
- 4. สูตรการปรับขนาดตัวเหนี่ยวนําทีละขั้นตอนสําหรับตัวแปลงบั๊ก
- 5. การเปรียบเทียบตัวเหนี่ยวนํา: เส้นทางทางเทคนิคสําหรับการใช้งานที่แตกต่างกัน
- 6. การใช้งานในอุตสาหกรรม: กรณีการใช้งานแนวตั้งสามกรณี
- 7. แนวทางปฏิบัติที่ดีที่สุดของเค้าโครง PCB สําหรับการจัดวางตัวเหนี่ยวนํา
- 8. ผู้คนยังถาม: คําถามที่พบบ่อย
- 9. สรุปและขั้นตอนต่อไป
1. ค่าใช้จ่ายแอบแฝงของการเลือกตัวเหนี่ยวนําผิด
ความล้มเหลวในการเลือกตัวเหนี่ยวนําจะไม่ประกาศตัวเองในระหว่างการจับภาพแผนผัง พวกเขาปรากฏขึ้นระหว่างการทดสอบความร้อนการรับรอง EMI หรือแย่กว่านั้น—ในภาคสนาม จากการวิเคราะห์บอร์ดพาวเวอร์ซัพพลายที่ส่งคืนภาคสนามกว่า 200 บอร์ด เราได้ระบุมิติความเสียหายร้ายแรงสามมิติ:
ผลกระทบต่อต้นทุน:
- การสลับตัวเหนี่ยวนําเดี่ยวหลังจากการผลิต PCB มีค่าใช้จ่าย $8,000–$25,000 ในค่าธรรมเนียมการรีสปินและการรับรองใหม่
- การรับรอง AEC-Q200 ใหม่ของยานยนต์เพิ่ม 12-16 สัปดาห์ ให้กับไทม์ไลน์ของโครงการ
- การหยุดชะงักของห่วงโซ่อุปทานจากการเปลี่ยนแปลงส่วนประกอบในนาทีสุดท้ายทําให้ต้นทุน BOM สูงขึ้น 15–30%
ผลกระทบต่อประสิทธิภาพ:
- DCR ที่มากเกินไปสามารถลดประสิทธิภาพของตัวแปลงได้ 3-8 เปอร์เซ็นต์
- ความอิ่มตัวของแกนจะกระตุ้นกระแสไฟกระชากที่ลดหลั่นลงสู่ความล้มเหลวของ MOSFET
- ตําแหน่งตัวเหนี่ยวนําที่ไม่ดีจะเพิ่ม EMI ซึ่งต้องมีการป้องกันราคาแพงหรือการออกแบบตัวกรองใหม่
ผลกระทบด้านคุณภาพและความน่าเชื่อถือ:
- การทํางานนอกเหนือจากพิกัดอุณหภูมิที่เพิ่มขึ้นจะทําให้คุณสมบัติของแกนเฟอร์ไรต์ลดลงอย่างถาวร
- ความเครียดเชิงกลในสภาพแวดล้อมที่มีการสั่นสะเทือนสูงทําให้เกิดการแตกร้าวของแกนกลางและความล้มเหลวของวงจรเปิด
- การมีเพศสัมพันธ์แบบแม่เหล็กที่ไม่มีการควบคุมจะนําสัญญาณรบกวนเข้าสู่วงจรอะนาล็อกและ RF ที่ละเอียดอ่อน
"ในการทดสอบตัวอย่างตัวเหนี่ยวนํา 500 ตัวอย่างจากผู้ผลิตหกราย เราพบว่า 22% ของชิ้นส่วนที่ติดฉลากด้วยข้อมูลจําเพาะที่เหมือนกันแสดงความแปรปรวนมากกว่า 15% ในประสิทธิภาพกระแสอิ่มตัวจริง"
2. พารามิเตอร์ตัวเหนี่ยวนําหลักที่นักออกแบบ PCB ทุกคนต้องเชี่ยวชาญ
ก่อนที่จะเปิดตัวเลือกส่วนประกอบคุณต้องสร้างพารามิเตอร์ห้าตัวที่กําหนดพฤติกรรมของตัวเหนี่ยวนําในวงจรในโลกแห่งความเป็นจริง:
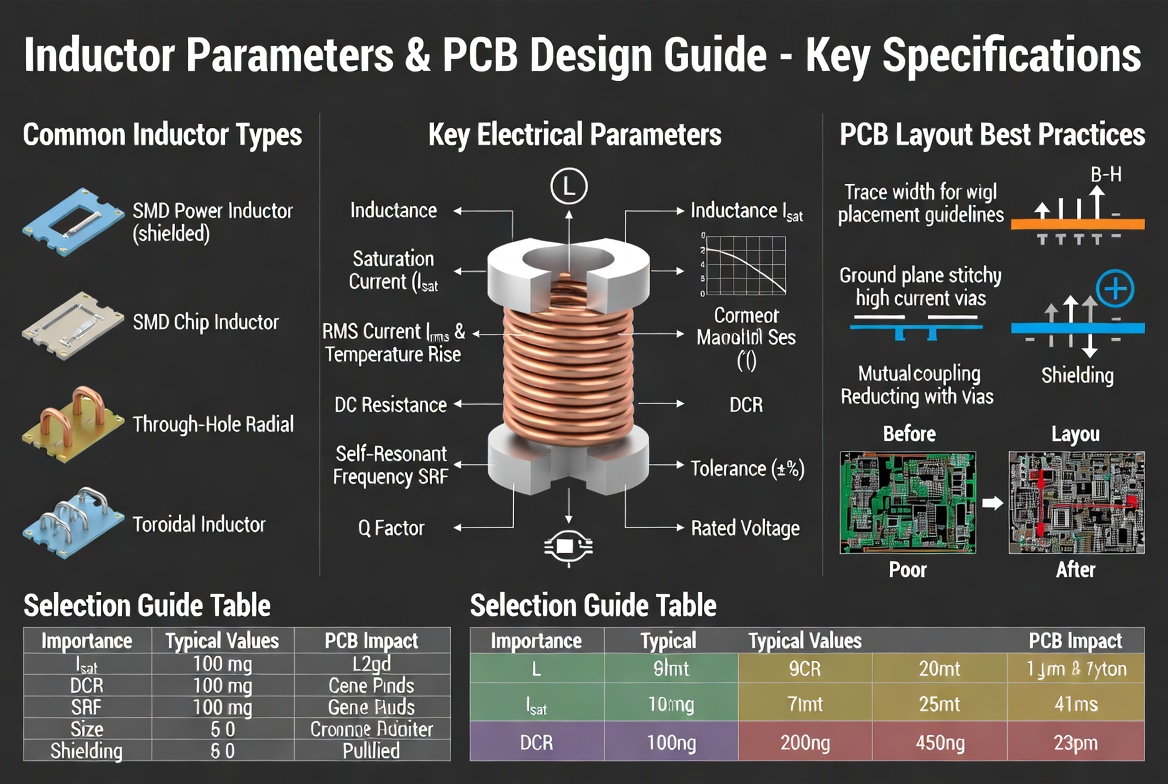
รูปที่ 1: พารามิเตอร์ตัวเหนี่ยวนําที่สําคัญสําหรับการออกแบบ PCB รวมถึงค่าความเหนี่ยวนํา กระแสอิ่มตัว (ISAT) กระแสไฟที่เพิ่มขึ้นของอุณหภูมิ (IRMS) ความต้านทานกระแสตรง (DCR) และความถี่เรโซแนนซ์ในตัว (SRF)
2.1 ค่าความเหนี่ยวนํา (L)
ค่าความเหนี่ยวนําเป็นตัวกําหนดปริมาณพลังงานที่ส่วนประกอบเก็บไว้ต่อรอบ สําหรับการสลับตัวควบคุมสิ่งนี้จะควบคุมกระแสกระเพื่อมโดยตรง สูตรมาตรฐานสําหรับตัวแปลงบั๊ก:
L = VOUT × (VIN - VOUT) / (ΔIL × fSW × VIN)
โดยที่ ΔIL (กระแสระลอกคลื่น) มักจะตั้งค่าเป็น 20–40% ของกระแสไฟขาออกเพื่อประสิทธิภาพสูงสุด
2.2 กระแสอิ่มตัว (ISAT)
ISAT กําหนดกระแสตรงที่ความเหนี่ยวนําลดลงตามเปอร์เซ็นต์ที่ระบุ - โดยทั่วไป 20–35% จากค่าเล็กน้อย แกนดรัมเฟอร์ไรต์แสดง "ความอิ่มตัวของแข็ง" ด้วยการยุบตัวของตัวเหนี่ยวนําอย่างกะทันหัน ในขณะที่ตัวเหนี่ยวนําขึ้นรูปคอมโพสิตแสดง "ความอิ่มตัวของสีอ่อน" โดยค่อยๆ ลดลง
กฎวิกฤต: เลือกตัวเหนี่ยวนําที่มี ISAT อย่างน้อย 1.3× กระแสไฟสูงสุดของคุณ
2.3 กระแสไฟที่เพิ่มขึ้นของอุณหภูมิ (IRMS)
IRMS ระบุกระแสที่เพิ่มอุณหภูมิตัวเหนี่ยวนํา 20°C ถึง 40°C เหนือสภาพแวดล้อม พารามิเตอร์นี้ขึ้นอยู่กับ:
- ความกว้างของร่องรอย PCB และความหนาของทองแดง
- ความใกล้ชิดกับส่วนประกอบที่สร้างความร้อน
- ระบบการไหลเวียนของอากาศและการจัดการความร้อน
2.4 ความต้านทานกระแสตรง (DCR)
DCR กําหนดการสูญเสียการนําไฟฟ้า โดยคํานวณได้ดังนี้:
PDCR = IRMS² × DCR
ความแตกต่างเพียง 20 mΩ ใน DCR อาจส่งผลต่อการสูญเสียพลังงานอย่างมากในการใช้งานที่มีกระแสไฟสูง สําหรับโหลด 3A นั่นแปลเป็น 180 mW ของความร้อนเพิ่มเติม
2.5 ความถี่เรโซแนนซ์ในตัวเอง (SRF)
SRF เป็นความถี่ต่ําสุดที่ตัวเหนี่ยวนําสะท้อนกับความจุของปรสิต ตรวจสอบให้แน่ใจเสมอว่าความถี่ในการทํางานของคุณต่ํากว่า 50% ของ SRF เพื่อรักษาพฤติกรรมอุปนัย
3. ตัวเหนี่ยวนําที่มีฉนวนหุ้มและไม่มีฉนวนหุ้ม: การเลือก
ที่ถูกต้องการตัดสินใจที่สําคัญที่สุดอย่างหนึ่งในการเลือกตัวเหนี่ยวนําคือจะใช้โครงสร้างที่มีฉนวนหุ้มหรือไม่หุ้มฉนวน ตัวเลือกนี้ส่งผลโดยตรงต่อ EMI ประสิทธิภาพ ต้นทุน และความยืดหยุ่นของเลย์เอาต์
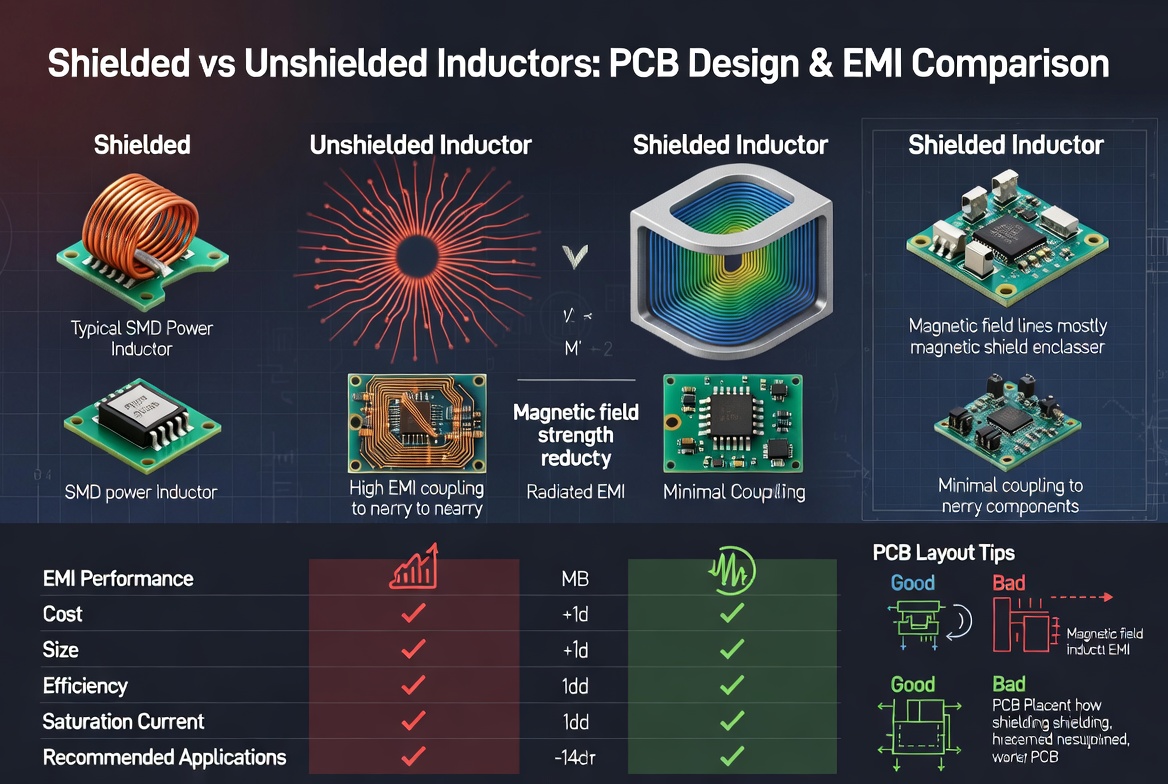
รูปที่ 2: ตัวเหนี่ยวนําที่มีฉนวนหุ้มมีสนามแม่เหล็กเพื่อลด EMI ทําให้จําเป็นสําหรับการออกแบบที่ไวต่อเสียงรบกวน ตัวเหนี่ยวนําที่ไม่มีฉนวนหุ้มให้ต้นทุนที่ต่ํากว่าและประสิทธิภาพที่สูงขึ้นเล็กน้อยในรูปแบบที่มีความหนาแน่นต่ํา
เมื่อใดควรเลือกตัวเหนี่ยวนําที่ไม่มีฉนวนหุ้ม
- วงจรไฟฟ้าที่เรียบง่ายที่มีความหนาแน่นของส่วนประกอบต่ํา
- อุปกรณ์อิเล็กทรอนิกส์สําหรับผู้บริโภคที่อ่อนไหวต่อต้นทุน
- การใช้งานที่ส่วนประกอบเว้นระยะห่างกันตามธรรมชาติ
เมื่อใดควรเลือกตัวเหนี่ยวนําที่มีฉนวนหุ้ม
- ตัวแปลง DC-DC และวงจร PMIC ในรูปแบบที่หนาแน่น
- อุปกรณ์อิเล็กทรอนิกส์อุตสาหกรรมและยานยนต์ขนาดกะทัดรัด
- การใช้งานกระแสไฟสูงที่การมีเพศสัมพันธ์แบบแม่เหล็กอาจทําให้วงจรใกล้เคียงไม่เสถียร
- การออกแบบที่ต้องการประสิทธิภาพที่คาดการณ์ได้และทําซ้ําได้ในชุดการผลิต
"ตัวเหนี่ยวนําที่มีฉนวนหุ้มสามารถลดการปล่อย H-field ที่แผ่รังสีได้ถึง 30 dB เมื่อเทียบกับทางเลือกที่ไม่มีฉนวนหุ้ม ซึ่งเป็นส่วนต่างที่สําคัญเมื่อผ่านการรับรอง CISPR 25 หรือ FCC Part 15"
การแลกเปลี่ยนนั้นเจียมเนื้อเจียมตัว: ตัวเหนี่ยวนําที่มีฉนวนหุ้มโดยทั่วไปจะมี DCR สูงกว่าเล็กน้อยและมีราคาสูงกว่าชิ้นส่วนที่ไม่มีฉนวนหุ้มที่เทียบเท่า 15-40% อย่างไรก็ตาม การบรรเทา EMI ที่มีให้มักจะช่วยลดความจําเป็นในการใช้ส่วนประกอบการกรองเพิ่มเติม ซึ่งช่วยประหยัดต้นทุนสุทธิ
4. สูตรการปรับขนาดตัวเหนี่ยวนําทีละขั้นตอนสําหรับตัวแปลงบั๊ก
ให้เราอธิบายการเลือกตัวเหนี่ยวนําที่ใช้งานได้จริงสําหรับการใช้งานตัวแปลงบั๊กทั่วไป
พารามิเตอร์การออกแบบ:
<เส้นขอบตาราง="1" ระยะห่างของเซลล์="0" cellpadding="6">
ขั้นตอนที่ 1: คํานวณรอบการทํางาน
D = VOUT / VIN = 3.3 / 12 = 0.275 (27.5%)
ขั้นตอนที่ 2: คํานวณกระแสระลอกคลื่น
ΔIL = 0.30 × IOUT = 0.30 × 3 A = 0.9 A (สูงสุดถึงสูงสุด)
ขั้นตอนที่ 3: คํานวณความเหนี่ยวนําขั้นต่ํา
L = (VIN - VOUT) × D / (ΔIL × fSW) L = (12 - 3.3) × 0.275 / (0.9 × 500,000) L = 8.7 × 0.275 / 450,000 L = 5.32 ไมโครชั่วโมง
ขั้นตอนที่ 4: เลือกค่ามาตรฐานและตรวจสอบการให้คะแนน
- เลือก: ค่ามาตรฐาน 5.6 μH
- กระแสเหนี่ยวนําสูงสุด: IOUT + ΔIL/2 = 3 + 0.45 = 3.45 A
- ISAT ที่จําเป็น: 3.45 A × 1.3 = ขั้นต่ํา 4.49 A
- IRMS ที่จําเป็น: 3 A × 1.2 = ขั้นต่ํา 3.6 A
เลือกตัวเหนี่ยวนําที่มี ISAT ≥ 4.5 A และ IRMS ≥ 3.6 A ตัวเหนี่ยวนําแม่พิมพ์หุ้มฉนวนขนาด 6×6 มม. พร้อม DCR < 30 mΩ เหมาะอย่างยิ่งสําหรับการใช้งานนี้
5. การเปรียบเทียบตัวเหนี่ยวนํา: เส้นทางทางเทคนิคสําหรับการใช้งานที่แตกต่างกัน
ตัวเหนี่ยวนําบางตัวไม่ได้ถูกสร้างขึ้นมาเท่ากัน โครงสร้างที่เหมาะสมที่สุดจะแตกต่างกันอย่างมากในแต่ละประเภทการใช้งาน ตารางเปรียบเทียบต่อไปนี้สรุปความแตกต่างที่สําคัญ:
| พารามิเตอร์ | IoT สําหรับผู้บริโภค / สวมใส่ได้ | อุตสาหกรรม / ยานยนต์ | โทรคมนาคม / เซิร์ฟเวอร์ |
|---|---|---|---|
| การเหนี่ยวนําทั่วไป | 1 μH – 22 μH | 2.2 μH – 100 μH | 0.47 μH – 10 μH |
| คะแนนปัจจุบัน | 0.5 A – 2 A | 3 A – 15 A | 10 A – 60 A |
| >เป้าหมาย DCR | <td style="text-align: center; padding: 10px;">< 200 mΩ <td style="text-align: center; padding: 10px;">< 50 mΩ <td style="text-align: กึ่งกลาง; ช่องว่างภายใน: 10px;">< 1 mΩ|||
| การป้องกัน | กึ่งชิลด์ยอมรับได้ | ต้องมีการป้องกันอย่างเต็มที่ | ป้องกันอย่างเต็มที่ + ตัวกรอง EMI |
| >วัสดุหลัก | เฟอร์ไรต์ (NiZn) | คอมโพสิตขึ้นรูป / เฟอร์ไรต์ | เหล็กผง / โลหะผสมแบบกําหนดเอง |
| >ช่วงอุณหภูมิ | -40°C ถึง +85°C | -40°C ถึง +125/150°C | -40°C ถึง +125°C |
| >การรับรอง | มาตรฐาน | AEC-Q200 | Telcordia / MIL-STD |
| ค่าใช้จ่ายโดยประมาณ | $0.05 – $0.30 | $0.50 – $3.00 | $2.00 – $15.00 |
ข้อมูลเชิงลึกที่สําคัญ: การพยายามใช้ตัวเหนี่ยวนําระดับผู้บริโภคในสภาพแวดล้อมยานยนต์จะส่งผลให้เกิดความล้มเหลวก่อนเวลาอันควร การประหยัดค่าใช้จ่ายล่วงหน้า 20-30% จะถูกลบออกโดยการเรียกคืนภาคสนามเพียงครั้งเดียว
6. การใช้งานในอุตสาหกรรม: กรณีการใช้งานแนวตั้งสามกรณี
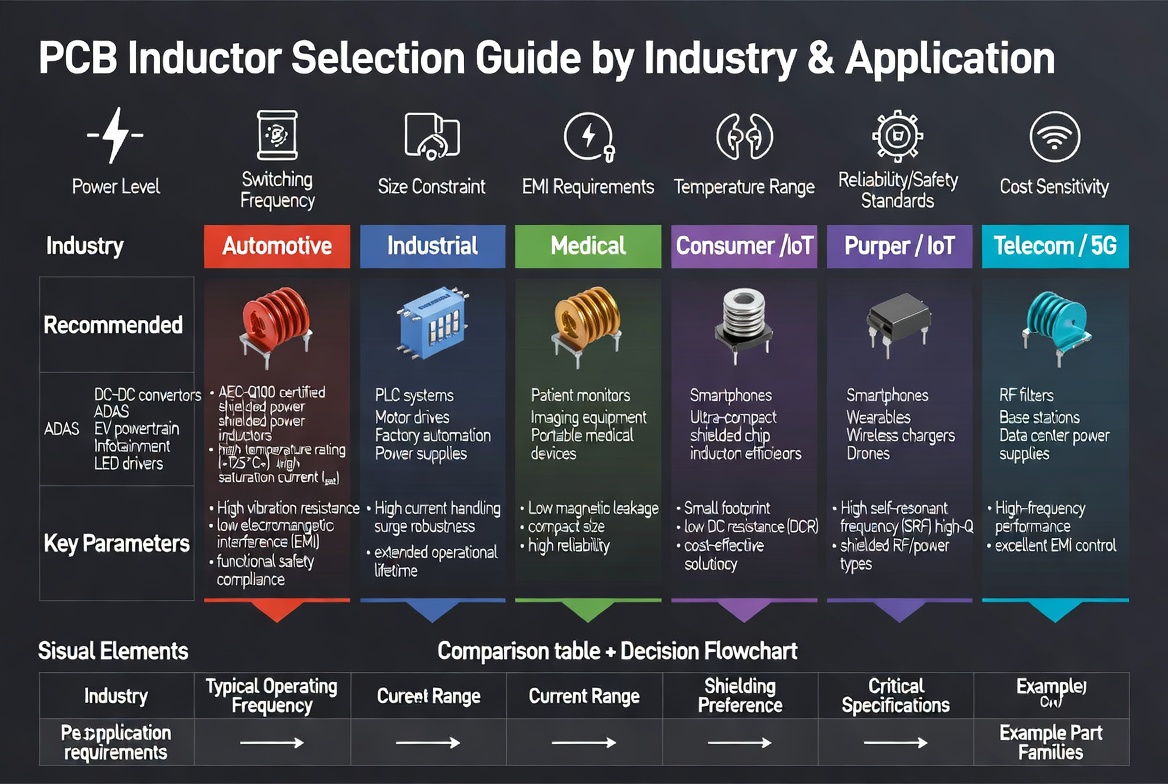
รูปที่ 3: ข้อกําหนดในการเลือกตัวเหนี่ยวนําแตกต่างกันอย่างมากในแอปพลิเคชัน IoT ยานยนต์ และโทรคมนาคมสําหรับผู้บริโภค ซึ่งแต่ละตัวต้องการการแลกเปลี่ยนที่แตกต่างกันระหว่างขนาด การจัดการกระแสไฟฟ้า และความน่าเชื่อถือ
กรณีการใช้งาน 1: IoT สําหรับผู้บริโภค — อุปกรณ์สวมใส่ที่ใช้พลังงานจากแบตเตอรี่
- การประยุกต์ใช้: ตัวแปลงบั๊ก 3.3V สําหรับฮับเซนเซอร์และโมดูล BLE
- ความท้าทาย: ยืดอายุการใช้งานแบตเตอรี่ให้สูงสุดในขณะที่ลดพื้นที่ PCB (6 มม. × 6 มม.)
- การเลือกตัวเหนี่ยวนํา: 2.2 μH, ตัวเหนี่ยวนําชิปหุ้มฉนวน 1.2 A, DCR = 85 mΩ
- ผลลัพธ์เชิงปริมาณ: อายุการใช้งานแบตเตอรี่นานขึ้น 23% เมื่อเทียบกับการออกแบบที่ไม่มีฉนวนหุ้มก่อนหน้านี้ ลด EMI ลง 18 dB ไม่จําเป็นต้องใช้ลูกปัดเฟอร์ไรต์ภายนอก
กรณีการใช้งาน 2: ยานยนต์ — โมดูลไดรเวอร์ไฟหน้า LED
- การประยุกต์ใช้: ตัวแปลงบั๊ก 48V ถึง 12V ขับเคลื่อนอาร์เรย์ LED ที่ 5A
- ความท้าทาย: ทํางานได้อย่างน่าเชื่อถือที่อุณหภูมิแวดล้อม 125°C ด้วยคุณสมบัติ AEC-Q200
- การเลือกตัวเหนี่ยวนํา: 10 μH, ตัวเหนี่ยวนําขึ้นรูปคอมโพสิต 8 A, DCR = 12 mΩ, เส้นโค้งความอิ่มตัวของสีอ่อน
- ผลลัพธ์เชิงปริมาณ: ความล้มเหลวภาคสนามเป็นศูนย์ มากกว่า 500,000 กม. การทดสอบเทียบเท่า ประสิทธิภาพคงอยู่สูงกว่า 94% ในช่วงทางแยก -40°C ถึง +150°C
กรณีการใช้งาน 3: โทรคมนาคม — การกระจายพลังงานของสถานีฐาน 5G
- การประยุกต์ใช้: ตัวควบคุม VR13 หลายเฟส 12V ถึง 0.8V สําหรับพลังงาน FPGA
- ความท้าทาย: ส่งมอบ 40A พร้อมการกระเพื่อมแรงดันไฟฟ้าต่ํากว่า 1% ในแบ็คเพลนความหนาแน่นสูง
- การเลือกตัวเหนี่ยวนํา: 0.22 μH, 25 A ต่อตัวเหนี่ยวนําคู่เฟส, DCR = 0.4 mΩ
- ผลลัพธ์เชิงปริมาณ: บรรลุประสิทธิภาพสูงสุด 96.2% การตอบสนองชั่วคราวดีขึ้น 35% เมื่อเทียบกับวิธีการเหนี่ยวนําแบบไม่ต่อเนื่อง พื้นที่ PCB ลดลง 40%
7. แนวทางปฏิบัติที่ดีที่สุดของเค้าโครง PCB สําหรับการจัดวางตัวเหนี่ยวนํา
แม้แต่ตัวเหนี่ยวนําที่ระบุอย่างสมบูรณ์ก็ยังทํางานได้ไม่ดีหากวางไว้บน PCB ได้ไม่ดี ห้องปฏิบัติการทดสอบ EMC ของเราได้วัดความแปรผันสูงถึง 15 dB ในการปล่อยรังสีโดยพิจารณาจากการเปลี่ยนแปลงเค้าโครงเท่านั้น
7.1 ลดพื้นที่ลูปปัจจุบัน
- วางตัวเหนี่ยวนําให้ใกล้กับ IC ตัวควบคุมการสลับมากที่สุด
- รักษาการติดตามโหนด SW ให้สั้นและกว้าง - นี่คือหม้อน้ํา EMI หลักของคุณ
- กําหนดเส้นทางการส่งคืนตัวเก็บประจุอินพุตและเอาต์พุตโดยตรงใต้เลเยอร์ส่วนประกอบ
7.2 แยกวงจรที่มีเสียงดังและละเอียดอ่อน
- รักษาระยะห่าง ≥ 10 มม. ระหว่างตัวเหนี่ยวนําไฟฟ้าและร่องรอยอะนาล็อกที่ละเอียดอ่อน
- หากใช้ตัวเหนี่ยวนําหลายตัว ให้ปรับทิศทางที่มุม 90 องศา เพื่อลดการมีเพศสัมพันธ์ซึ่งกันและกัน
- ห้ามกําหนดเส้นทางสัญญาณเซ็นเซอร์หรือสายอะนาล็อกอิมพีแดนซ์สูงใต้หรือใกล้กับตัวเหนี่ยวนํา
7.3 กลยุทธ์ระนาบภาคพื้นดิน
- ใช้ ระนาบกราวด์ที่เป็นของแข็ง ใต้ตัวเหนี่ยวนําเพื่อบรรจุสนามแม่เหล็ก
- หลีกเลี่ยงระนาบกราวด์แยกภายใต้โหนดสวิตชิ่ง ซึ่งจะสร้างความไม่ต่อเนื่องของเส้นทางส่งคืน
- วางจุดแวะระบายความร้อนไว้ใต้แผ่นเหนี่ยวนําเพื่อการกระจายความร้อนในการออกแบบกระแสไฟสูง
7.4 เรขาคณิตติดตาม
- ใช้ มุม 45 องศา หรือร่องรอยโค้ง - อย่าเข้ามุม 90 องศาบนเส้นทางกระแสสูง
- ร่องรอยขนาดสําหรับความจุปัจจุบัน: ขั้นต่ํา 1 ออนซ์ทองแดงต่อแอมป์ สําหรับชั้นภายนอก
- เก็บแผ่นเหนี่ยวนําให้ตรงตามแผ่นข้อมูล - แผ่นอิเล็กโทรดขนาดใหญ่จะเพิ่มความเสี่ยงในการฝังศพระหว่างการรีโฟลว์
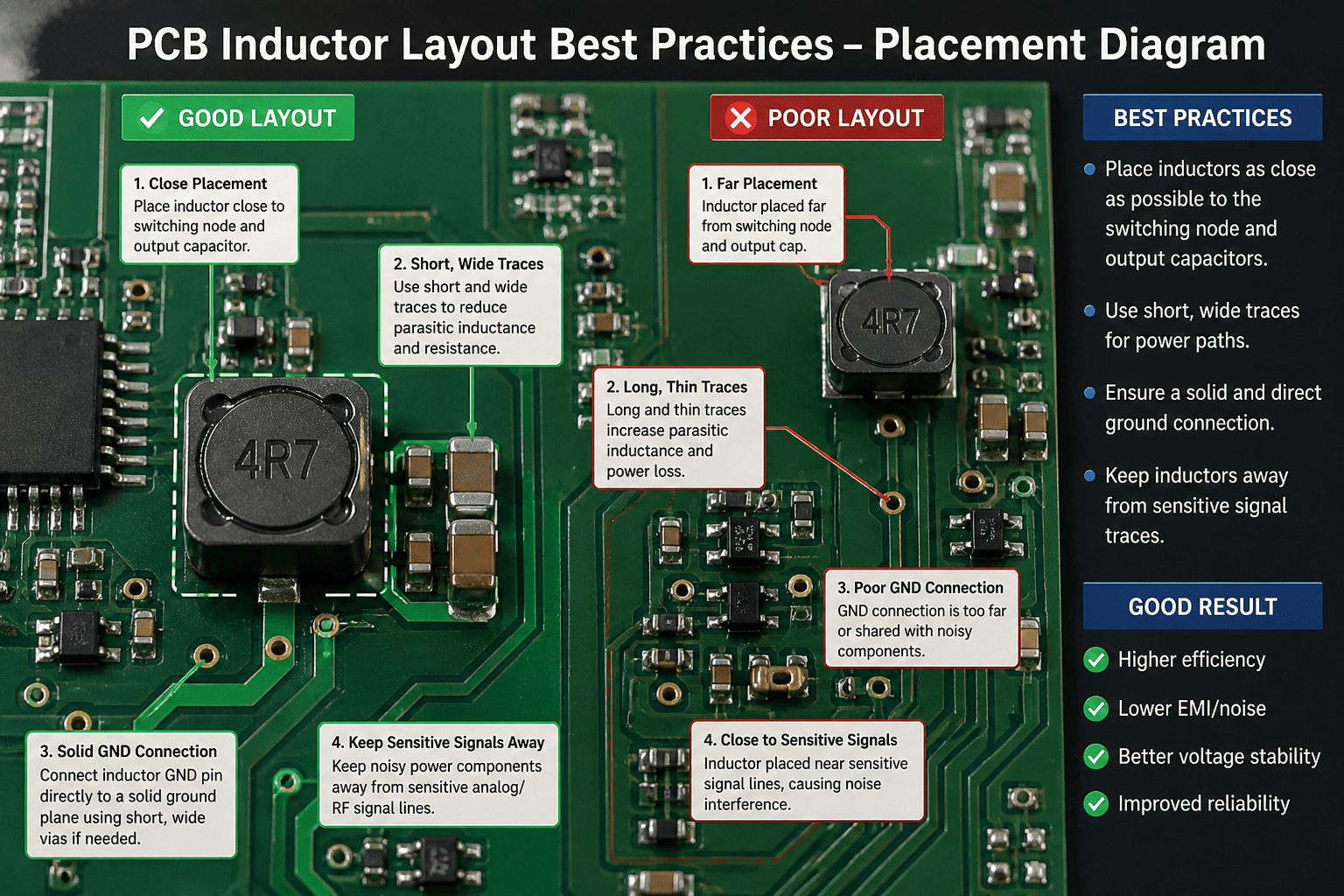
รูปที่ 4: เค้าโครง PCB ที่เหมาะสมที่สุดสําหรับการจัดวางตัวเหนี่ยวนํา—ลดพื้นที่ลูปปัจจุบัน รักษาระยะห่างจากวงจรที่ละเอียดอ่อน และใช้กลยุทธ์ระนาบกราวด์ที่มั่นคงเพื่อลด EMI และเพิ่มประสิทธิภาพสูงสุด
8. ผู้คนยังถาม: คําถามที่พบบ่อย
อะไรคือความแตกต่างระหว่างกระแสอิ่มตัวและกระแสอุณหภูมิที่เพิ่มขึ้น?
กระแสอิ่มตัว (ISAT) คือกระแสตรงที่ความเหนี่ยวนําของตัวเหนี่ยวนําลดลงตามเปอร์เซ็นต์ที่กําหนด tage (โดยทั่วไปคือ 20–35%) ซึ่งบ่งชี้ถึงความอิ่มตัวของแกนแม่เหล็ก กระแสไฟที่เพิ่มขึ้นของอุณหภูมิ (IRMS) คือกระแสที่ทําให้อุณหภูมิของตัวเหนี่ยวนําเพิ่มขึ้น 20°C ถึง 40°C เหนือสภาพแวดล้อมเนื่องจากความร้อนแบบต้านทาน ทั้งสองเป็นข้อกําหนดอิสระ คุณต้องแน่ใจว่ากระแสไฟที่ใช้งานของคุณต่ํากว่าขีดจํากัดทั้งสอง ในการออกแบบของเรา เราใช้ปัจจัยลดพิกัด 1.3× กับ ISAT และปัจจัยลดพิกัด 1.2× กับ IRMS เพื่อการทํางานในระยะยาวที่เชื่อถือได้
ความถี่การสลับส่งผลต่อการเลือกตัวเหนี่ยวนําอย่างไร?
ความถี่การสลับที่สูงขึ้นช่วยให้ค่าความเหนี่ยวนําน้อยลง อย่างไรก็ตาม พวกมันจะเพิ่มการสูญเสียแกนกลางและการสูญเสียความต้านทานไฟฟ้ากระแสสลับเนื่องจากผลกระทบของผิวหนังและความใกล้ชิด ความถี่การสลับที่เหมาะสมแสดงถึงการแลกเปลี่ยน: 2 MHz เป็นที่นิยมมากขึ้นในการออกแบบที่กะทัดรัด เนื่องจากวัสดุเฟอร์ไรต์สมัยใหม่มีปัจจัยด้านประสิทธิภาพสูงสุดในช่วงนี้ ตรวจสอบเสมอว่า SRF ของตัวเหนี่ยวนําที่คุณเลือกยังคงอยู่เหนือความถี่การสลับของคุณอย่างน้อย 2×
ฉันสามารถใช้ตัวเหนี่ยวนําเดียวกันสําหรับการออกแบบตัวแปลงบั๊กและบูสต์ได้หรือไม่
แม้ว่าตัวเหนี่ยวนําเดียวกัน สามารถ ทํางานในโทโพโลยีทั้งสองแบบ แต่เกณฑ์การคัดเลือกจะแตกต่างกัน ตัวแปลงบูสต์มีกระแสสูงสุดสูงกว่าตัวแปลงบั๊กสําหรับกําลังขับเท่ากัน เนื่องจากตัวเหนี่ยวนําต้องจัดการทั้งกระแสอินพุตและกระแสโหลดที่สะท้อนกลับ สําหรับการออกแบบบูสต์ เราขอแนะนําให้เลือกตัวเหนี่ยวนําที่มีพิกัด ISAT ที่ 1.5× กระแสตัวเหนี่ยวนําเฉลี่ย แทนที่จะเป็นกฎ 1.3× ที่ใช้สําหรับตัวแปลงบั๊ก
เหตุใดตัวเหนี่ยวนําของฉันจึงร้อนแม้ว่ากระแสจะต่ํากว่าค่าที่กําหนดก็ตาม
การสร้างความร้อนขึ้นอยู่กับปัจจัยหลายประการนอกเหนือจากพิกัดปัจจุบัน ตรวจสอบสาเหตุที่พบบ่อยเหล่านี้:
- DCR มากเกินไป: การสูญเสียพลังงาน = IRMS² × DCR 50 mΩ DCR ที่ 2A สร้างความร้อน 200 mW
- การสูญเสียแกนสูง: การทํางานใกล้ SRF หรือด้วยกระแสกระเพื่อมที่มากเกินไปจะเพิ่มความร้อนของแกนกลาง
- การออกแบบระบายความร้อนไม่ดี: พื้นที่ทองแดงไม่เพียงพอ ขาดจุดระบายความร้อน หรืออยู่ใกล้กับแหล่งความร้อนอื่นๆ
- ข้อจํากัดของการติดตาม PCB: ร่องรอยแคบ (< 0.5 มม.) ที่มี> 1A เพิ่มความร้อนตัวต้านทาน
อคติ DC มีผลกระทบต่อประสิทธิภาพของตัวเหนี่ยวนําอย่างไร?
กระแสไบแอส DC ช่วยลดการซึมผ่านที่มีประสิทธิภาพของแกนเฟอร์ไรต์ทําให้การเหนี่ยวนําลดลงภายใต้ภาระ เอฟเฟกต์นี้เด่นชัดในแกนเหล็กแบบผงและปานกลางในเฟอร์ไรต์ NiZn เมื่อประเมินตัวเหนี่ยวนํา ให้ศึกษาเส้นโค้ง L vs. I (ความเหนี่ยวนําเทียบกับกระแส) ในแผ่นข้อมูลเสมอ แทนที่จะพึ่งพาค่าเล็กน้อยเพียงอย่างเดียว เราได้วัดการลดลงของความเหนี่ยวนําที่ 18–25% ที่พิกัดกระแสไฟฟ้าในชิ้นส่วนเชิงพาณิชย์บางชิ้น
Shielded vs. unshielded: เมื่อไหร่ที่ค่าใช้จ่ายเพิ่มเติมจะสมเหตุสมผล?
พรีเมี่ยมต้นทุนสําหรับตัวเหนี่ยวนําที่มีฉนวนหุ้ม (โดยทั่วไปจะมากกว่า 15-40%) จะสมเหตุสมผลเมื่อ:
- การออกแบบของคุณประกอบด้วย วงจรอะนาล็อกที่ละเอียดอ่อน ภายในระยะ 10 มม. ของตัวเหนี่ยวนํา
- คุณต้องผ่านการรับรอง EMI (CISPR, FCC, VCCI) โดยไม่มีตัวกรองภายนอก
- การออกแบบใช้ ตําแหน่งความหนาแน่นสูง กับส่วนประกอบทั้งสองด้านของ PCB
- คุณต้องการ ประสิทธิภาพที่คาดการณ์ได้และทําซ้ําได้ ในล็อตการผลิต
สําหรับการออกแบบที่เรียบง่ายความหนาแน่นต่ําและไวต่อต้นทุนโดยไม่มีข้อ จํากัด ของ EMI ตัวเหนี่ยวนําที่ไม่มีฉนวนหุ้มยังคงเป็นตัวเลือกที่ใช้งานได้
9. บทสรุปและขั้นตอนต่อไป
การเลือกตัวเหนี่ยวนําในการออกแบบ PCB ไม่ได้เป็นเพียงตัวเลือกส่วนประกอบเท่านั้น แต่เป็นการตัดสินใจระดับระบบที่กระเพื่อมผ่านประสิทธิภาพ ประสิทธิภาพการระบายความร้อน การปฏิบัติตามข้อกําหนด EMI และความน่าเชื่อถือในระยะยาว วิศวกรที่เชี่ยวชาญกระบวนการนี้ส่งมอบแหล่งจ่ายไฟที่ทํางานเย็นกว่า เงียบกว่า และเชื่อถือได้มากกว่าผู้ที่ถือว่าตัวเหนี่ยวนําเป็นสิ่งที่คิดในภายหลัง
ประเด็นสําคัญจากคู่มือนี้:
- ลดอัตราเสมอ: ใช้มาร์จิ้น 1.3× กับ ISAT และมาร์จิ้น 1.2× กับ IRMS
- ลด DCR: ทุกมิลลิโอห์มมีความสําคัญในการออกแบบกระแสสูง
- ป้องกันเมื่อไม่แน่นอน: ค่าใช้จ่ายในการป้องกันนั้นน้อยกว่าค่าใช้จ่ายของความล้มเหลวของ EMI มาก
- จําลองก่อนสร้าง: ใช้เครื่องมือของผู้จําหน่ายเพื่อตรวจสอบความเหนี่ยวนําภายใต้อคติและอุณหภูมิ DC
- เลย์เอาต์คือครึ่งหนึ่งของการต่อสู้: ตัวเหนี่ยวนําที่สมบูรณ์แบบในรูปแบบที่ไม่ดีคือการออกแบบที่ล้มเหลว
"จากการทดสอบการออกแบบกว่า 500+ แบบ เราพบอย่างสม่ําเสมอว่าทีมที่ทุ่มเทเวลาในการเลือกและจัดวางตัวเหนี่ยวนําที่เหมาะสมในระหว่างขั้นตอนแผนผังจะลดอัตราการรีสปิน PCB ลง 60% และเวลาในการรับรองลง 40%"
พร้อมที่จะเพิ่มประสิทธิภาพการออกแบบ PCB ครั้งต่อไปของคุณแล้วหรือยัง ติดต่อทีมวิศวกรของเราเพื่อรับการตรวจสอบการออกแบบฟรี หรือสํารวจเครื่องมือการเลือกตัวเหนี่ยวนําที่ครอบคลุมของเราเพื่อค้นหาส่วนประกอบที่เหมาะสมที่สุดสําหรับความต้องการใช้งานเฉพาะของคุณ