

อธิบายเทคโนโลยี LiDAR: Solid-State LiDAR กับ LiDAR เชิงกล
LiDAR (Light Detection and Ranging) เป็นเทคโนโลยีการตรวจจับที่วัดระยะทางโดยใช้แสงเลเซอร์และสร้างการแสดง 3 มิติที่แม่นยําของสภาพแวดล้อมโดยรอบ มีการใช้กันอย่างแพร่หลายในยานยนต์ไร้คนขับ หุ่นยนต์ โดรน ระบบอัตโนมัติทางอุตสาหกรรม และระบบทําแผนที่
ระบบ LiDAR สมัยใหม่แบ่งออกเป็นสองประเภทหลัก: LiDAR เชิงกล และ LiDAR โซลิดสเตต LiDAR เชิงกลอาศัยชุดออปติคัลที่หมุนได้เพื่อสแกนสภาพแวดล้อม ในขณะที่ LiDAR แบบโซลิดสเตตใช้การสแกนอิเล็กทรอนิกส์ที่ใช้เซมิคอนดักเตอร์โดยไม่มีชิ้นส่วนที่เคลื่อนไหว
บทความนี้อธิบาย หลักการทางวิศวกรรม สถาปัตยกรรม และลักษณะการทํางาน ของเซ็นเซอร์ LiDAR และให้การเปรียบเทียบทางเทคนิคระหว่างเทคโนโลยี LiDAR แบบโซลิดสเตตและเชิงกล นอกจากนี้ยังสํารวจการใช้งานในโลกแห่งความเป็นจริงและข้อควรพิจารณาในการเลือกสําหรับวิศวกรและนักออกแบบระบบ
สารบัญ
- LiDAR คืออะไร
- สถาปัตยกรรมหลักของระบบ LiDAR
- โซลิดสเตต LiDAR
- LiDAR เชิงกล
- Solid-State LiDAR เทียบกับ LiDAR เชิงกล
- [การประยุกต์ใช้ LiDAR ที่สําคัญ](#major-การประยุกต์ใช้ Lidar)
- วิธีเลือกเทคโนโลยี LiDAR ที่เหมาะสม
- คําถามที่พบบ่อย
- สรุป
LiDAR คืออะไร
LiDAR ย่อมาจาก Light Detection and Ranging ซึ่งเป็นวิธีการสํารวจระยะไกลที่วัดระยะทางโดยการปล่อยพัลส์เลเซอร์และวัดเวลาที่แสงสะท้อนจะกลับไปที่เซ็นเซอร์
หลักการวัดพื้นฐานคือ เวลาบิน (ToF):
- ตัวปล่อย LiDAR ส่งพัลส์เลเซอร์ไปยังวัตถุ
- ชีพจรสะท้อนออกจากพื้นผิววัตถุ
- เครื่องรับตรวจจับสัญญาณสะท้อน
- ระบบคํานวณเวลาไป-กลับของแสง
เนื่องจากแสงเดินทางด้วยความเร็วคงที่ จึงสามารถคํานวณระยะทางได้อย่างแม่นยํา
สมการระยะทาง:
ระยะทาง = (c × t) / 2
ที่ไหน:
- c = ความเร็วแสง
- t = เวลาระหว่างการปล่อยและการตรวจจับ
ด้วยการทําซ้ํากระบวนการนี้หลายพันหรือหลายล้านครั้งต่อวินาทีในหลายทิศทาง ระบบ LiDAR จะสร้าง พอยต์คลาวด์ ซึ่งเป็นการแสดงเชิงพื้นที่ 3 มิติของสภาพแวดล้อม
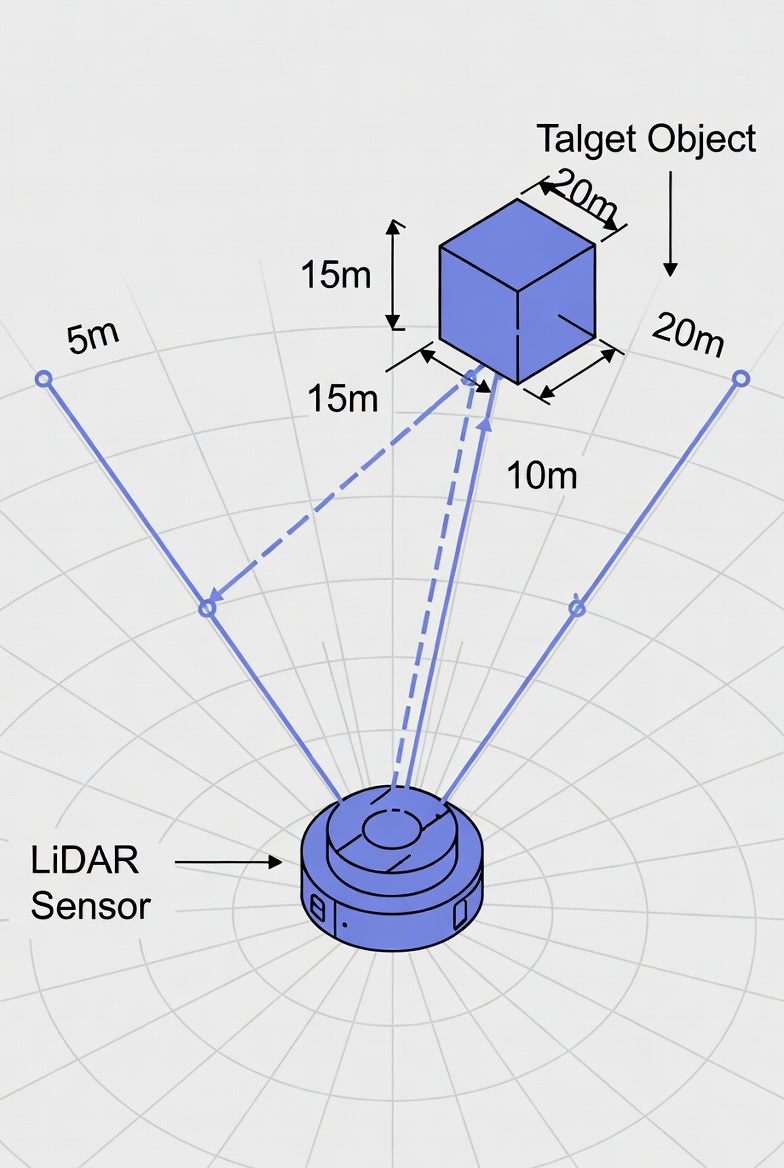
รูปที่ 1 การวัดระยะทาง LiDAR และการสร้าง 3D Point Cloud
สถาปัตยกรรมหลักของระบบ LiDAR
เซ็นเซอร์ LiDAR ทั่วไปประกอบด้วยระบบย่อยหลักหลายระบบ
ตัวปล่อยเลเซอร์
ตัวปล่อยสร้างพัลส์สั้น ๆ ของแสงเลเซอร์ที่สอดคล้องกัน
ความยาวคลื่นทั่วไป ได้แก่ :
- 850 นาโนเมตร
- 905 นาโนเมตร
- 1550 นาโนเมตร
การเลือกความยาวคลื่นส่งผลต่อ ช่วง ความปลอดภัยของดวงตา และการดูดซึมบรรยากาศ
ระบบสแกนออปติคัล
ระบบย่อยนี้นําลําแสงเลเซอร์ไปยังทิศทางต่างๆ ในอวกาศ
มีสองแนวทางหลัก:
- การสแกนด้วยกลไก
- การสแกนแบบอิเล็กทรอนิกส์ (โซลิดสเตต)
ตัวรับสัญญาณตรวจจับแสง
เครื่องรับตรวจจับสัญญาณเลเซอร์สะท้อน เครื่องตรวจจับทั่วไป ได้แก่ :
- APD (โฟโตไดโอดหิมะถล่ม)
- SPAD (ไดโอดหิมะถล่มโฟตอนเดี่ยว)
เครื่องตรวจจับเหล่านี้มีความไวสูงและสามารถตรวจจับสัญญาณสะท้อนที่อ่อนแอมาก
หน่วยประมวลผลสัญญาณ
ตัวประมวลผลสัญญาณทําหน้าที่:
- การวัดเวลาบิน
- การคํานวณระยะทาง
- การกรองเสียงรบกวน
- การสร้างพอยต์คลาวด์
ระบบ LiDAR สมัยใหม่มักจะรวม โปรเซสเซอร์ FPGA หรือ ASIC สําหรับการประมวลผลข้อมูลความเร็วสูง
LiDAR โซลิดสเตต
LiDAR โซลิดสเตตเป็นสถาปัตยกรรม LiDAR ที่ ขจัดการหมุนทางกล และอาศัยเทคโนโลยีการสแกนที่ใช้เซมิคอนดักเตอร์
วิธีการนี้ช่วยเพิ่ม ความน่าเชื่อถือ ขนาด และความสามารถในการผลิต ได้อย่างมาก ทําให้เหมาะสําหรับการผลิตยานยนต์ในปริมาณมาก
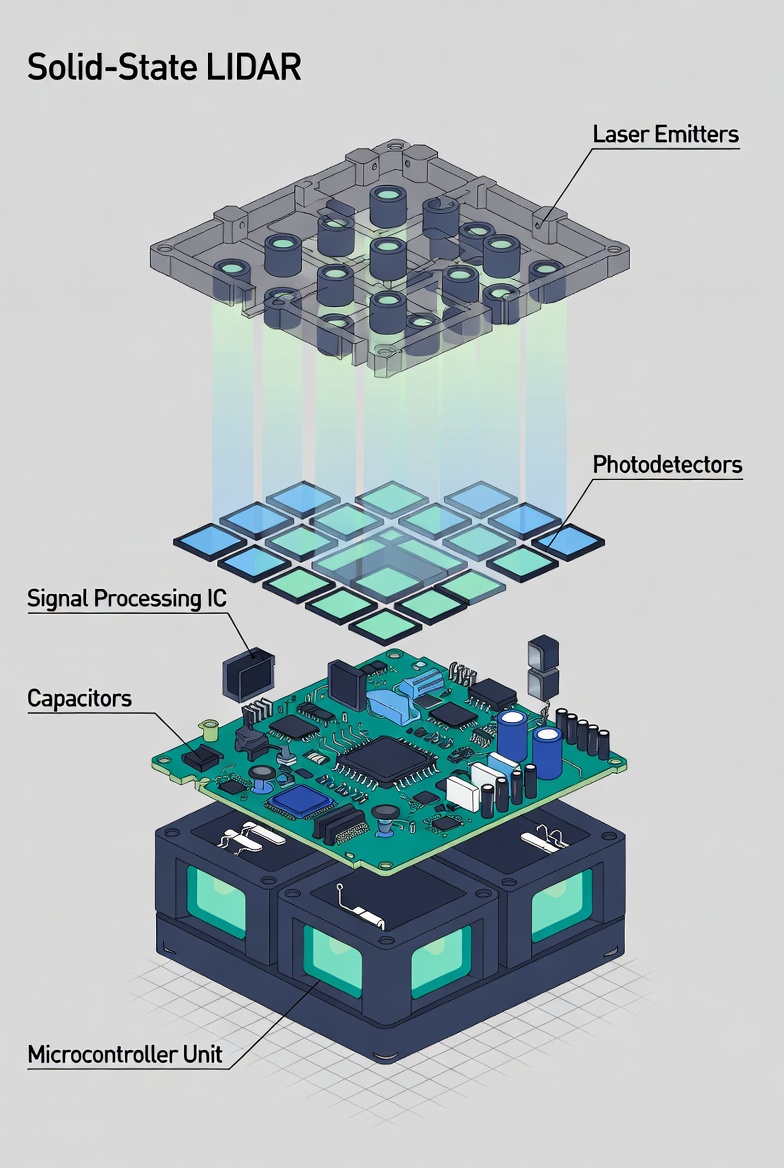
รูปที่ 2 โครงสร้างภายใน LiDAR โซลิดสเตต
หลักการทํางานของ LiDAR โซลิดสเตต
แทนที่จะใช้เลนส์แบบหมุน LiDAR โซลิดสเตตใช้เทคโนโลยีการบังคับเลี้ยวลําแสงอิเล็กทรอนิกส์ เช่น:
- กระจก MEMS
- อาร์เรย์แบบออปติคัลเฟส
- อาร์เรย์ Flash LiDAR
MEMS LiDAR
ใช้กระจกไมโครไฟฟ้าเพื่อควบคุมลําแสงเลเซอร์
ข้อดี:
- ขนาดกะทัดรัด
- ต้นทุนปานกลาง
- ความละเอียดในการสแกนที่ดี
แฟลช LiDAR
ปล่อยพัลส์เลเซอร์กว้างที่ส่องสว่างทั้งฉากพร้อมกัน
ข้อดี:
- ไม่มีกลไกการสแกน
- อัตราเฟรมที่เร็วมาก
ออปติคัล Phased Array LiDAR
ใช้การควบคุมเฟสเซมิคอนดักเตอร์เพื่อควบคุมลําแสงเลเซอร์ด้วยระบบอิเล็กทรอนิกส์
ข้อดี:
- โซลิดสเตตเต็มรูปแบบ
- กะทัดรัดมาก
ตัวอย่าง: Linear Array Short-Range LiDAR
LiDAR โซลิดสเตตระยะสั้น ทั่วไปใช้สําหรับการตรวจจับสิ่งกีดขวางในหุ่นยนต์และระบบอัตโนมัติทางอุตสาหกรรม
ตัวอย่างลักษณะการทํางาน
| พารามิเตอร์ | ค่าทั่วไป |
|---|---|
| ปริมาณการดําเนินงาน tage | 5.1 โวลต์ |
| การบริโภคในปัจจุบัน | 0.136 ก |
| การใช้พลังงาน | ~0.7 วัตต์ |
| ช่วงการตรวจจับ | 25 มม. – 300 มม. |
| ที่ดินของ View | ~109° |
| ความละเอียดเชิงมุม | ~ 0.7 องศา |
| ความแม่นยําในร่ม | 1–3 มม |
เซ็นเซอร์ดังกล่าวมักรวมเข้ากับ:
- หุ่นยนต์คลังสินค้า
- เครื่องใช้ไฟฟ้าอัจฉริยะ
- อุปกรณ์อัตโนมัติทางอุตสาหกรรม
- ระบบตรวจจับสิ่งกีดขวาง
LiDAR เชิงกล
Mechanical LiDAR เป็น สถาปัตยกรรม LiDAR แบบดั้งเดิม ที่ใช้ในหุ่นยนต์ยุคแรกและต้นแบบยานยนต์ไร้คนขับ
เซ็นเซอร์เหล่านี้ใช้ ชุดประกอบออปติคัลแบบหมุนได้ เพื่อสแกนสภาพแวดล้อม
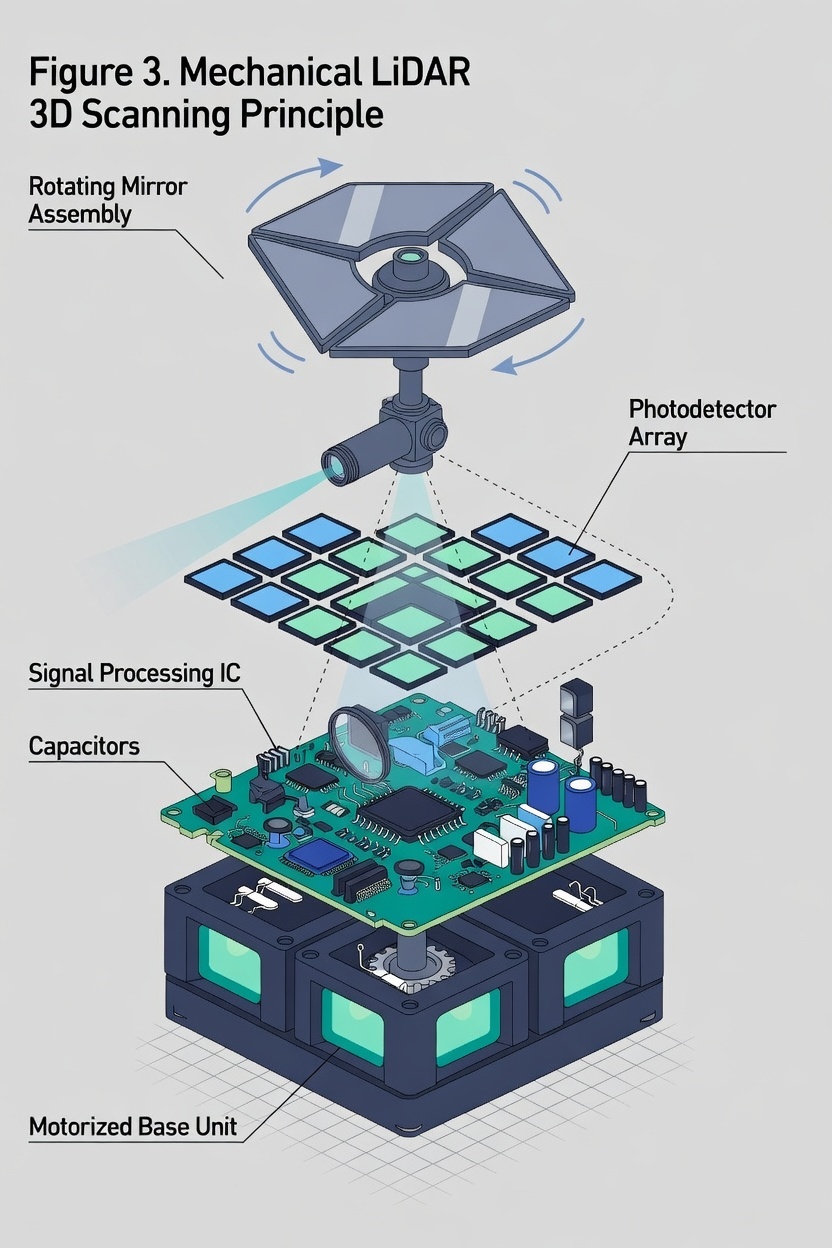
รูปที่ 3 หลักการสแกน LiDAR 3D แบบกลไก
หลักการทํางานของ LiDAR เชิงกล
เซ็นเซอร์ LiDAR แบบกลไกใช้ กลไกการหมุนที่ขับเคลื่อนด้วยมอเตอร์
กระบวนการสแกนทํางานดังนี้:
- ตัวปล่อยเลเซอร์สร้างพัลส์
- ชุดสแกนหมุน
- พัลส์เลเซอร์กวาดไปทั่วสิ่งแวดล้อม
- เครื่องรับตรวจพบสัญญาณสะท้อน
- ข้อมูลระยะทางจะถูกบันทึกสําหรับแต่ละมุม
เนื่องจากเซ็นเซอร์หมุนอย่างต่อเนื่อง จึงสามารถสแกนสภาพแวดล้อมได้ 360°
การออกแบบนี้สร้าง พอยต์คลาวด์ 3 มิติ ที่หนาแน่นและแม่นยํามาก
ตัวอย่าง: เซ็นเซอร์ RPLIDAR A3 360°
RPLIDAR A3 ใช้กันอย่างแพร่หลายในระบบนําทางหุ่นยนต์
ลักษณะทางไฟฟ้า
| พารามิเตอร์ | ความคุ้มค่า |
|---|---|
| ปริมาณการดําเนินงาน tage | 5.1 โวลต์ |
| การดําเนินงานปัจจุบัน | 0.3736 ก |
| การใช้พลังงาน | ~1.9 วัตต์ |
ประสิทธิภาพการวัด
| ลักษณะเฉพาะ | ความคุ้มค่า |
|---|---|
| ช่วงการวัด | 5 ซม. – 18 ม |
| ครอบคลุมการสแกน | 360 องศา |
| ความละเอียดเชิงมุม | ~ 0.225 องศา |
| โซนตาบอด | ~0.2 ม |
เซ็นเซอร์ LiDAR เชิงกลมักใช้ใน:
- หุ่นยนต์ SLAM
- การนําทางในร่ม
- อุปกรณ์ทําแผนที่
- แพลตฟอร์มการวิจัย
Solid-State LiDAR กับ LiDAR เชิงกล
| ลักษณะเฉพาะ | LiDAR โซลิดสเตต | LiDAR เครื่องกล |
|---|---|---|
| วิธีการสแกน | พวงมาลัยลําแสงอิเล็กทรอนิกส์ | การหมุนที่ขับเคลื่อนด้วยมอเตอร์ |
| ชิ้นส่วนที่เคลื่อนไหว | ไม่มี | ส่วนประกอบที่หมุน | ได้
| ขนาด | กะทัดรัด | ใหญ่กว่า |
| ความน่าเชื่อถือ | จุดสูง | การสึกหรอทางกลเป็นไปได้ |
| ครอบคลุมการสแกน | โดยทั่วไปมีจํากัด | เป็นไปได้ 360° เต็มรูปแบบ |
| การใช้พลังงาน | ต่ํากว่า | สูงกว่า |
| ต้นทุน (การผลิตจํานวนมาก) | ต่ํากว่า | สูงกว่า |
ในช่วงไม่กี่ปีที่ผ่านมา ผู้ผลิตยานยนต์กําลังเปลี่ยนไปใช้ LiDAR แบบโซลิดสเตตอย่างรวดเร็ว เนื่องจากข้อได้เปรียบด้านความน่าเชื่อถือและความสามารถในการปรับขนาด
แอปพลิเคชั่นหลักของ LiDAR
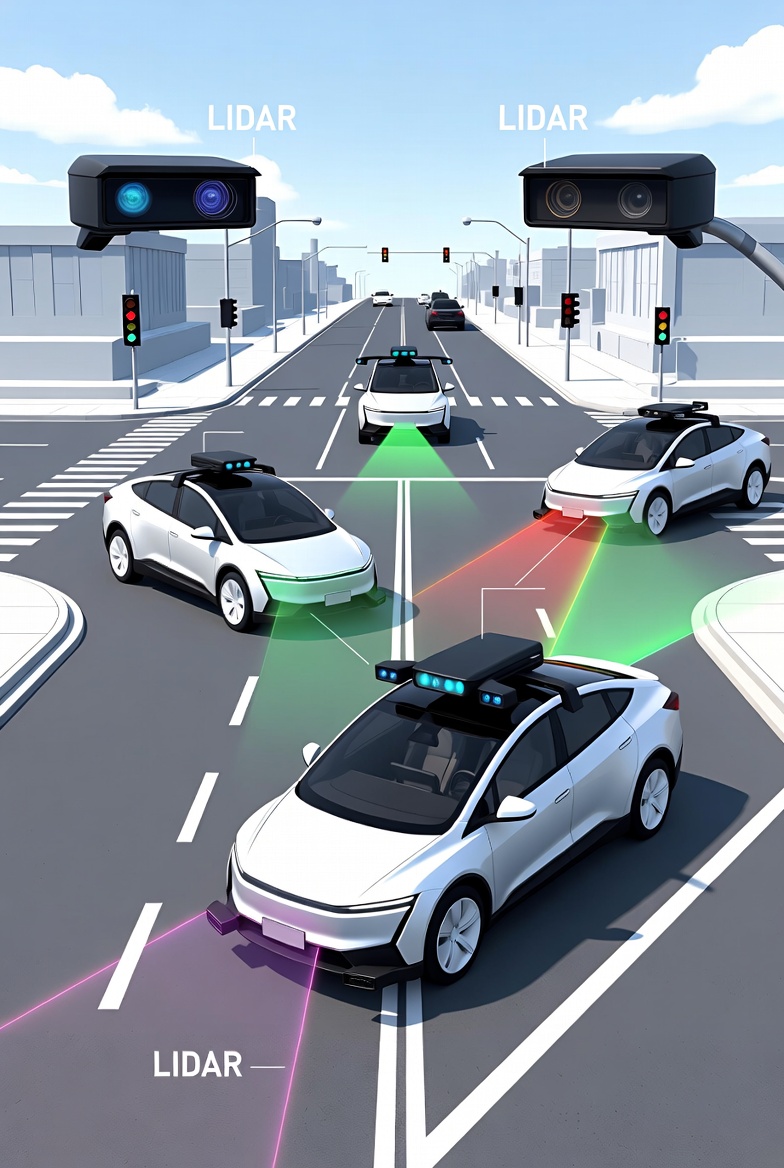
รูปที่ 4 แอปพลิเคชั่น LiDAR ในยานยนต์ไร้คนขับ
ยานพาหนะไร้คนขับ
LiDAR ให้การรับรู้ 3 มิติความละเอียดสูงสําหรับ:
- การตรวจจับสิ่งกีดขวาง
- การตรวจจับช่องทางเดินรถ
- การจดจําคนเดินเท้า
หุ่นยนต์และ SLAM
หุ่นยนต์ใช้ LiDAR เพื่อสร้างแผนที่และนําทางสภาพแวดล้อมโดยใช้อัลกอริทึม Simultaneous Localization and Mapping (SLAM)
การทําแผนที่และการสํารวจทางอากาศ
LiDAR ที่ติดตั้งบนโดรนสามารถสร้าง แผนที่ภูมิประเทศ และแบบจําลองภูมิประเทศที่มีความแม่นยําสูง
เมืองอัจฉริยะ
เซ็นเซอร์ LiDAR ช่วยตรวจสอบ:
- การจราจร
- สภาพโครงสร้างพื้นฐาน
- ข้อมูลการวางผังเมือง
ระบบอัตโนมัติทางอุตสาหกรรม
โรงงานใช้ LiDAR สําหรับ:
- การตรวจจับวัตถุ
- การนําทางคลังสินค้า
- ระบบความปลอดภัยอัตโนมัติ
วิธีเลือกเทคโนโลยี LiDAR ที่เหมาะสม
โดยทั่วไปวิศวกรจะประเมินปัจจัยหลายประการเมื่อเลือกเซ็นเซอร์ LiDAR
การสแกนครอบคลุม
การใช้งานที่ต้องการความตระหนักด้านสิ่งแวดล้อมอย่างเต็มที่ (เช่น หุ่นยนต์ทําแผนที่) มักต้องการ การสแกน 360° ซึ่งชอบ LiDAR แบบกลไก
ขนาดระบบ
ระบบฝังตัวหรืออุปกรณ์ขนาดกะทัดรัดได้รับประโยชน์จาก LiDAR โซลิดสเตต เนื่องจากฟอร์มแฟคเตอร์ที่เล็กกว่า
ความน่าเชื่อถือ
เซ็นเซอร์โซลิดสเตตให้ความน่าเชื่อถือที่ดีขึ้นเนื่องจากช่วยขจัดการสึกหรอทางกล
การใช้พลังงาน
ระบบที่ใช้พลังงานจากแบตเตอรี่มักชอบ LiDAR โซลิดสเตต
ต้นทุนในการผลิตจํานวนมาก
แอปพลิเคชันยานยนต์ต้องการเซ็นเซอร์ที่ปรับขนาดได้ต้นทุนต่ํา ทําให้ LiDAR โซลิดสเตตเป็นโซลูชันที่ต้องการ
คําถามที่พบบ่อย
ข้อได้เปรียบหลักของ LiDAR โซลิดสเตตคืออะไร?
LiDAR โซลิดสเตตมี ไม่มีชิ้นส่วนที่เคลื่อนไหว ซึ่งช่วยเพิ่มความทนทาน ลดขนาด และช่วยให้สามารถผลิตเซมิคอนดักเตอร์ขนาดใหญ่ได้
เหตุใด LiDAR แบบกลไกจึงสามารถสแกนได้ 360°
LiDAR เชิงกลใช้ชุดออปติคัลแบบหมุนที่ขับเคลื่อนด้วยมอเตอร์ ทําให้ลําแสงเลเซอร์สามารถกวาดไปทั่วทั้งสภาพแวดล้อมได้
LiDAR ตัวไหนดีกว่าสําหรับยานยนต์ไร้คนขับ?
แพลตฟอร์มยานยนต์ไร้คนขับรุ่นต่อไปส่วนใหญ่ชอบ LiDAR โซลิดสเตต เนื่องจากมีความน่าเชื่อถือสูงกว่า
อะไรจํากัดประสิทธิภาพของ LiDAR?
ปัจจัยจํากัดที่สําคัญ ได้แก่ :
- สภาพบรรยากาศ
- การสะท้อนแสงของพื้นผิว
- การรบกวนจากแสงแดด
- ความละเอียดของเซนเซอร์
สรุป
LiDAR เป็นเทคโนโลยีการตรวจจับที่สําคัญสําหรับระบบอัจฉริยะสมัยใหม่ ด้วยการใช้การวัดระยะทางด้วยเลเซอร์ LiDAR ช่วยให้เครื่องจักรสามารถรับรู้และทําแผนที่สภาพแวดล้อมโดยรอบได้อย่างแม่นยําสูง
LiDAR แบบกลไกให้ การสแกนมุมกว้างและประสิทธิภาพที่สมบูรณ์ ในขณะที่ LiDAR แบบโซลิดสเตตให้ ขนาดกะทัดรัด ความน่าเชื่อถือที่ดีขึ้น และการผลิตที่ปรับขนาดได้
เนื่องจากเทคโนโลยีเซมิคอนดักเตอร์และโฟโตนิกส์มีการพัฒนาอย่างต่อเนื่อง LiDAR แบบโซลิดสเตตจึงคาดว่าจะกลายเป็นสถาปัตยกรรมที่โดดเด่นสําหรับการใช้งานในอนาคตในการขับขี่อัตโนมัติ