

Mechanical LiDAR vs Solid-State LiDAR : คู่มือการเลือกสถาปัตยกรรม ประสิทธิภาพ และวิศวกรรม
LiDAR (Light Detection and Ranging) ได้กลายเป็นเทคโนโลยีการตรวจจับพื้นฐานสําหรับยานยนต์ไร้คนขับ หุ่นยนต์ การทําแผนที่เชิงพื้นที่ และโครงสร้างพื้นฐานอัจฉริยะ ด้วยการวัดเวลาที่ต้องใช้สําหรับพัลส์เลเซอร์ในการสะท้อนจากวัตถุ ระบบ LiDAR จะสร้างการแสดงสภาพแวดล้อมโดยรอบแบบสามมิติที่มีความแม่นยําสูง
สถาปัตยกรรมหลักสองแบบครองตลาด: LiDAR เชิงกล และ LiDAR โซลิดสเตต LiDAR เชิงกลอาศัยชุดออปติคัลที่หมุนได้เพื่อให้ได้การสแกนมุมกว้าง ในขณะที่ LiDAR แบบโซลิดสเตตกําจัดชิ้นส่วนที่เคลื่อนไหวด้วยเทคโนโลยีการบังคับเลี้ยวลําแสงที่ใช้เซมิคอนดักเตอร์
บทความนี้จะตรวจสอบ สถาปัตยกรรมทางวิศวกรรม หลักการทํางาน ส่วนประกอบภายใน ลักษณะการทํางาน และการใช้งานในโลกแห่งความเป็นจริง ของ LiDAR ทั้งสองประเภท นอกจากนี้ยังมี เกณฑ์การคัดเลือกที่ใช้งานได้จริงสําหรับนักออกแบบระบบ ช่วยให้วิศวกรกําหนดโซลูชัน LiDAR ที่เหมาะสมที่สุดโดยพิจารณาจากข้อกําหนดด้านช่วง ความละเอียด ความน่าเชื่อถือ และการผสานรวม
สารบัญ
- [1. พื้นฐานของเทคโนโลยี LiDAR](#1-พื้นฐานของเทคโนโลยี Lidar)
- 2. สถาปัตยกรรม LiDAR เชิงกล
- [3. หลักการทํางานของ LiDAR เชิงกล] (#3-หลักการทํางานของ-กลไก-lidar)
- 4. ส่วนประกอบหลักของระบบ LiDAR เชิงกล
- 5. สถาปัตยกรรม LiDAR โซลิดสเตต
- 6. เทคโนโลยีการสแกน LiDAR แบบโซลิดสเตต
- [7. ส่วนประกอบหลักของ Solid-State LiDAR ] (# 7-core-components-of-solid-state-lidar)
- [8. เครื่องกล vs Solid-State LiDAR : การเปรียบเทียบทางวิศวกรรม] (#8-mechanical-vs-solid-state-lidar-engineering-comparison)
- [9. การใช้งานหลักของระบบ LiDAR](#9-แอปพลิเคชันหลักของระบบ Lidar)
- 10. ปัจจัยสําคัญในการเลือกระบบ LiDAR
- คําถามที่พบบ่อย
- สรุป
1. พื้นฐานของเทคโนโลยี LiDAR
LiDAR (Light Detection and Ranging) เป็น เทคโนโลยีการตรวจจับด้วยแสงแบบแอคทีฟ ที่กําหนดระยะห่างระหว่างเซ็นเซอร์กับวัตถุโดยการวัด เวลาบิน (ToF) ของพัลส์เลเซอร์
กระบวนการวัดพื้นฐานประกอบด้วยสามขั้นตอน:
- การปล่อยเลเซอร์ – พัลส์เลเซอร์สั้น ๆ จะถูกส่งไปยังสิ่งแวดล้อม
- การสะท้อน – ชีพจรสะท้อนจากวัตถุ เช่น ภูมิประเทศ ยานพาหนะ หรือโครงสร้าง
- การตรวจจับ – เครื่องตรวจจับแสงจะวัดสัญญาณย้อนกลับและบันทึกเวลาเดินทาง
ระยะทางคํานวณโดยใช้:
ระยะทาง = (c × t) / 2
ที่ไหน:
- c = ความเร็วแสง
- t = เวลาเดินทางไปกลับของพัลส์เลเซอร์
ด้วยการทําซ้ํากระบวนการนี้หลายล้านครั้งต่อวินาทีและการสแกนในหลายทิศทาง ระบบ LiDAR จะสร้าง พอยต์คลาวด์ 3 มิติที่หนาแน่น ซึ่งแสดงถึงสภาพแวดล้อมโดยรอบ
2. สถาปัตยกรรม LiDAR เชิงกล
LiDAR เชิงกล
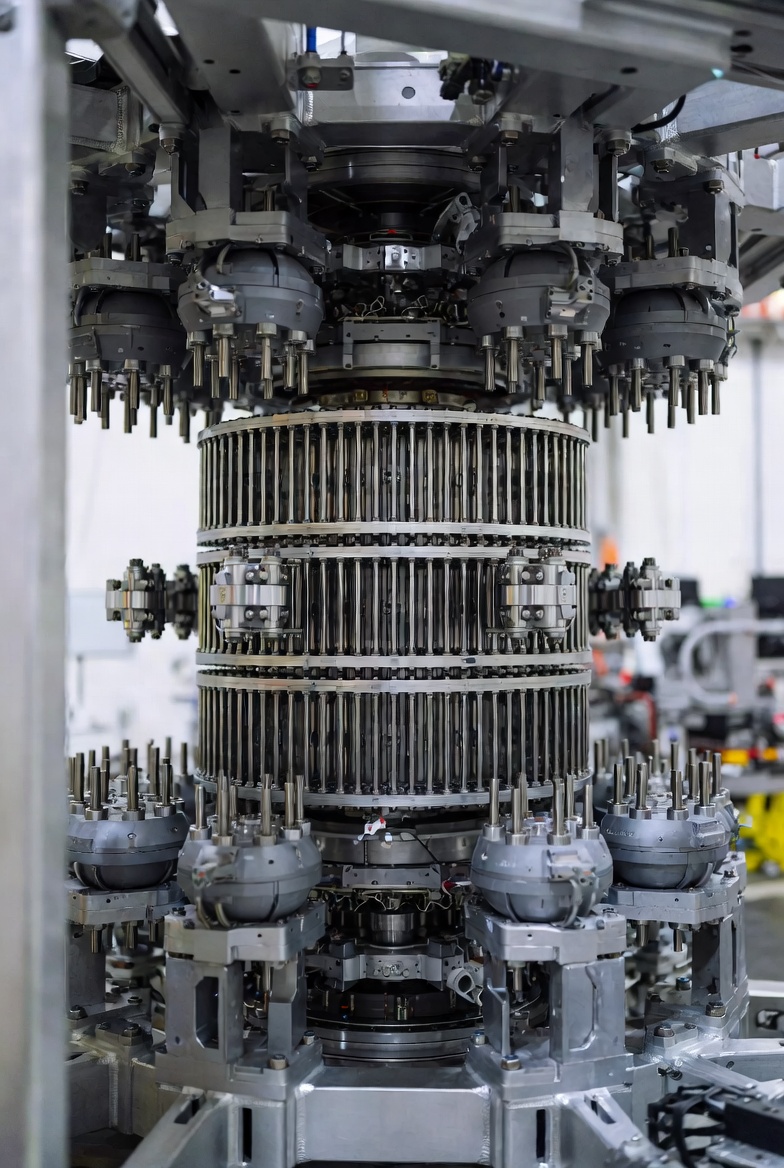
รูปที่ 1 สถาปัตยกรรมเซนเซอร์หมุน LiDAR เชิงกล
Mechanical LiDAR เป็นสถาปัตยกรรม LiDAR ที่ใช้งานเชิงพาณิชย์ที่เก่าแก่ที่สุด ใช้ ชุดประกอบออปติคัลหมุน เพื่อสแกนสภาพแวดล้อมและรวบรวมการวัดเชิงพื้นที่
ระบบทั่วไปประกอบด้วยหัวหมุนประกอบด้วย:
- ตัวปล่อยเลเซอร์
- เครื่องตรวจจับแสง
- กระจกสแกน
- เลนส์ออปติคอล
ชุดประกอบทั้งหมดหมุนโดยใช้ มอเตอร์ที่มีความแม่นยํา ทําให้ LiDAR สามารถบรรลุ มุมมองแนวนอน 360 องศา
เนื่องจากความสามารถในการจับข้อมูลความละเอียดสูงมุมกว้าง LiDAR แบบกลไกจึงถูกนํามาใช้ในอดีตใน:
- ต้นแบบยานยนต์ไร้คนขับยุคแรก
- การทําแผนที่ภูมิประเทศความละเอียดสูง
- การวิจัยหุ่นยนต์
- ระบบสํารวจ
อย่างไรก็ตาม การมีชิ้นส่วนที่เคลื่อนไหวทําให้เกิด ความกังวลเกี่ยวกับความซับซ้อนทางกล ต้นทุน และความน่าเชื่อถือ
3. หลักการทํางานของ LiDAR เชิงกล
กระบวนการสแกน LiDAR เชิงกล
รูปที่ 2 หลักการสแกน LiDAR แบบกลไก 360 องศา
ระบบ LiDAR เชิงกลทําการสแกนสิ่งแวดล้อมผ่านการหมุนอย่างต่อเนื่องของชุดเซ็นเซอร์
เวิร์กโฟลว์ทั่วไปประกอบด้วย:
การสแกนแบบหมุน
มอเตอร์ความเร็วสูงจะหมุนหัวเซนเซอร์ ซึ่งมักจะอยู่ระหว่าง 5 ถึง 20 รอบต่อวินาที
การปล่อยพัลส์เลเซอร์
เลเซอร์ที่เรียงแนวในแนวตั้งหลายตัวจะปล่อยพัลส์ระหว่างการหมุน
การวัดเวลาบิน
เครื่องตรวจจับแสงจะวัดเวลาย้อนกลับของพัลส์สะท้อนเพื่อกําหนดระยะห่างของวัตถุ
การสร้างพอยต์คลาวด์
การวัดระยะทางจะรวมกับข้อมูลมุมการหมุนและการวางแนวของเซ็นเซอร์เพื่อสร้าง พอยต์คลาวด์เชิงพื้นที่ 3 มิติ
ระบบ LiDAR เชิงกลระดับไฮเอนด์สามารถสร้าง ล้านจุดต่อวินาที ทําให้สามารถทําแผนที่สภาพแวดล้อมที่มีรายละเอียดสูงได้
4. ส่วนประกอบหลักของระบบ LiDAR เชิงกล
เซ็นเซอร์ LiDAR เชิงกลทั่วไปรวมระบบย่อยที่สําคัญหลายระบบ
เครื่องส่งสัญญาณเลเซอร์
สร้างพัลส์เลเซอร์สั้น โดยทั่วไปจะใช้เลเซอร์ความยาวคลื่น 905 นาโนเมตรหรือ 1550 นาโนเมตร
ตัวรับสัญญาณตรวจจับแสง
ตรวจจับโฟตอนสะท้อนและแปลงสัญญาณออปติคัลเป็นสัญญาณไฟฟ้า ประเภทเครื่องตรวจจับทั่วไป ได้แก่ :
- โฟโตไดโอดหิมะถล่ม (APD)
- ไดโอดหิมะถล่มโฟตอนเดี่ยว (SPAD)
กลไกการสแกนแบบหมุน
มอเตอร์และตลับลูกปืนเชิงกลหมุนชุดออปติคัลเพื่อให้ครอบคลุมสิ่งแวดล้อมอย่างเต็มที่
หน่วยประมวลผลสัญญาณ
ทําการขยายสัญญาณ การกรอง และการคํานวณระยะทางโดยใช้อัลกอริทึม ToF
ตําแหน่งและเซ็นเซอร์ตรวจจับความเคลื่อนไหว
ระบบต่างๆ เช่น GPS, IMU และไจโรสโคป ให้ข้อมูลการวางแนวเพื่อจัดตําแหน่งการวัด LiDAR ในพิกัดทั่วโลกได้อย่างแม่นยํา
5. สถาปัตยกรรม LiDAR โซลิดสเตต
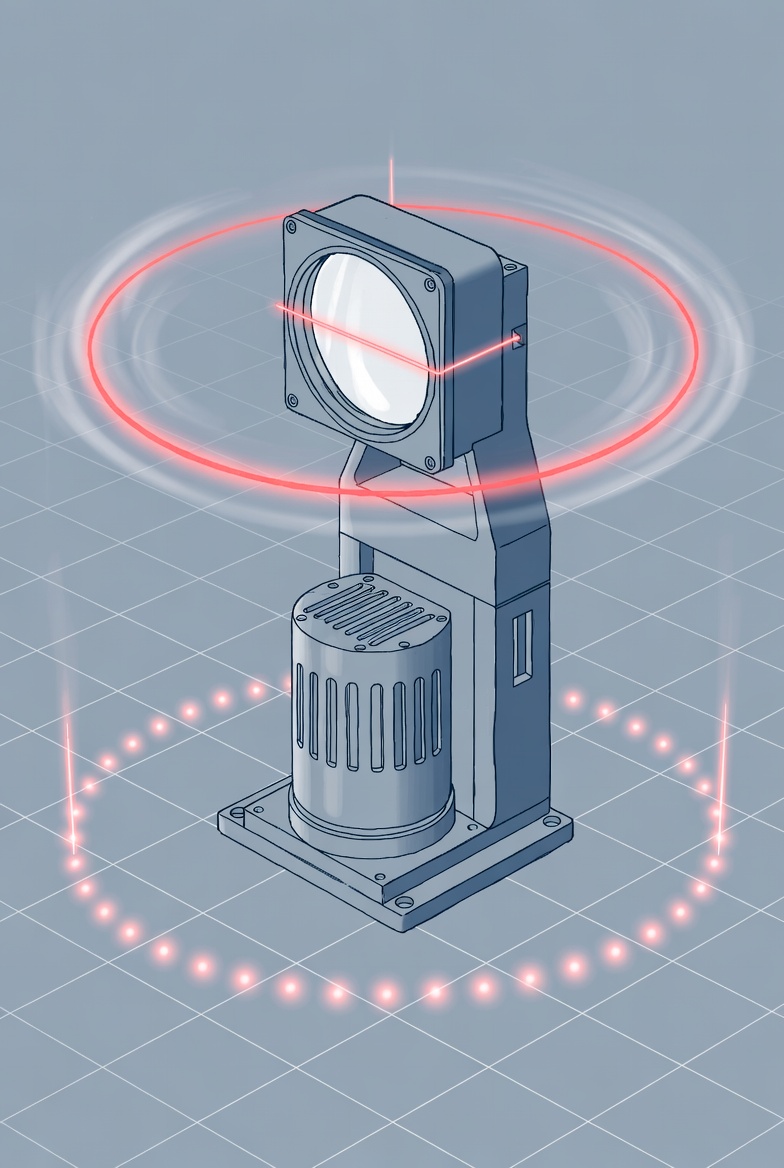
LiDAR โซลิดสเตต
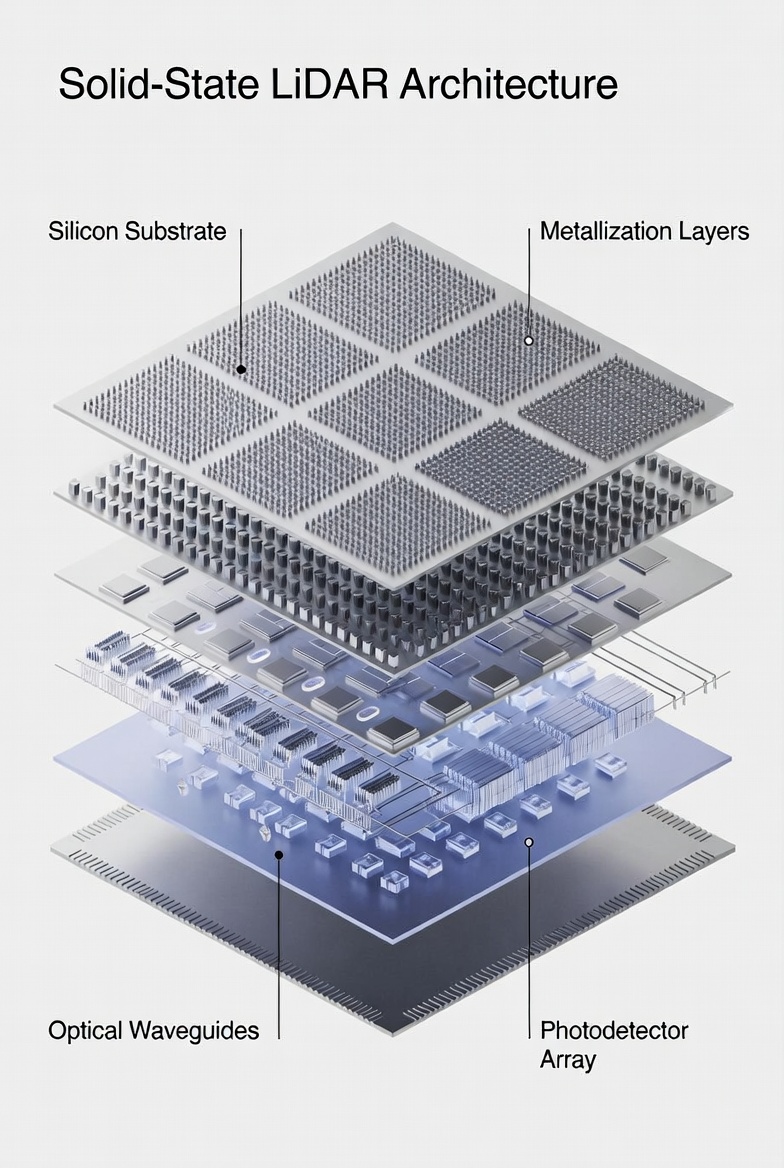
รูปที่ 3 สถาปัตยกรรมเซมิคอนดักเตอร์ LiDAR โซลิดสเตต
LiDAR แบบโซลิดสเตตแสดงถึงเซ็นเซอร์ LiDAR รุ่นใหม่ที่ออกแบบมา โดยไม่ต้องหมุนด้วยกลไก การบังคับเลี้ยวแบบลําแสงทําได้โดยใช้ ส่วนประกอบอิเล็กทรอนิกส์หรือโฟโตนิก
ข้อดี ได้แก่ :
- ขนาดทางกายภาพที่เล็กลง
- ความน่าเชื่อถือที่สูงขึ้น
- ลดการใช้พลังงาน
- ความสามารถในการปรับขนาดที่ดีขึ้นสําหรับการผลิตจํานวนมาก
LiDAR แบบโซลิดสเตตได้กลายเป็นโซลูชันที่ต้องการสําหรับ ระบบตรวจจับระดับยานยนต์ และ แพลตฟอร์มการรับรู้แบบฝังตัว
6. เทคโนโลยีการสแกน LiDAR แบบโซลิดสเตต
LiDAR โซลิดสเตตสามารถใช้งานได้โดยใช้เทคโนโลยีการสแกนที่แตกต่างกันหลายอย่าง
MEMS LiDAR
ใช้ กระจกไมโครเครื่องกลไฟฟ้า เพื่อควบคุมลําแสงเลเซอร์ กระจกเหล่านี้แกว่งด้วยความเร็วสูงเพื่อสแกนทั่วทั้งมุมมอง
ข้อดี:
- การออกแบบที่กะทัดรัด
- ต้นทุนปานกลาง
- ความละเอียดที่ดี
แฟลช LiDAR
ส่องสว่างทั้งฉากในพัลส์เดียวโดยใช้ลําแสงเลเซอร์กว้าง และจับภาพสะท้อนโดยใช้ อาร์เรย์เซ็นเซอร์ 2 มิติ
ข้อดี:
- ไม่จําเป็นต้องสแกน
- อัตราเฟรมที่เร็วมาก
ข้อจํากัด:
- ระยะการตรวจจับที่สั้นลง
- ความต้องการพลังงานที่สูงขึ้น
ออปติคัลเฟสอาร์เรย์ (OPA)
ใช้ การควบคุมเฟสโฟโตนิกในตัว เพื่อควบคุมลําแสงเลเซอร์ด้วยระบบอิเล็กทรอนิกส์โดยไม่ต้องใช้ชิ้นส่วนที่เคลื่อนไหว
ข้อดี:
- การออกแบบโซลิดสเตตเต็มรูปแบบ
- ความน่าเชื่อถือสูง
- การรวมชิปที่ปรับขนาดได้
อย่างไรก็ตาม เทคโนโลยี OPA ยังคงพัฒนาและยังคงมีราคาค่อนข้างแพง
7. ส่วนประกอบหลักของ LiDAR โซลิดสเตต
LiDAR โซลิดสเตตรวมโมดูลที่ใช้เซมิคอนดักเตอร์หลายโมดูล
อาร์เรย์ตัวปล่อยเลเซอร์
สร้างลําแสงเลเซอร์หลายลําพร้อมกันเพื่อให้สามารถสแกนความเร็วสูงได้
อาร์เรย์ Photodetector
รับโฟตอนสะท้อนและแปลงเป็นสัญญาณไฟฟ้า
โมดูลพวงมาลัยลําแสง
ใช้การสแกนโดยใช้กระจก MEMS, OPA โฟโตนิกส์ หรือการสลับอิเล็กทรอนิกส์
การประมวลผลและควบคุมอิเล็กทรอนิกส์
โปรเซสเซอร์แบบฝังตัวทํา:
- การขยายสัญญาณ
- การกรองเสียงรบกวน
- การคํานวณระยะทาง
- การสร้างพอยต์คลาวด์ใหม่
ระบบเหล่านี้มักจะรวม ASIC หรือโปรเซสเซอร์ FPGA สําหรับการประมวลผลข้อมูลแบบเรียลไทม์
8. เครื่องกล vs Solid-State LiDAR : การเปรียบเทียบทางวิศวกรรม
| ลักษณะเฉพาะ | LiDAR เครื่องกล | LiDAR โซลิดสเตต |
|---|---|---|
| วิธีการสแกน | การประกอบออปติคัลแบบหมุน | พวงมาลัยลําแสงอิเล็กทรอนิกส์หรือโฟโตนิก |
| ชิ้นส่วนที่เคลื่อนไหว | ใช่ | ไม่มีหรือน้อยที่สุด |
| ที่ดินของ View | สูงถึง 360° | โดยทั่วไป 90°–180° |
| ขนาด | ตัวเรือนเซ็นเซอร์ขนาดใหญ่ | โมดูลเซมิคอนดักเตอร์ขนาดกะทัดรัด |
| ความน่าเชื่อถือ | การสึกหรอทางกลเป็นไปได้ | ความน่าเชื่อถือในระยะยาวที่สูงขึ้น |
| การผลิต | การประกอบเครื่องจักรกลที่ซับซ้อน | การผลิตเซมิคอนดักเตอร์ปรับขนาดได้ |
| แนวโน้มต้นทุน | สูงกว่า | ลดลงด้วยการผลิตจํานวนมาก |
โดยทั่วไปแล้ว LiDAR แบบกลไกจะให้ ความละเอียดเชิงมุมที่สูงขึ้นและครอบคลุมที่กว้างขึ้น ในขณะที่ LiDAR แบบโซลิดสเตตให้ ความน่าเชื่อถือและศักยภาพในการรวมที่ดีกว่า
9. การใช้งานหลักของระบบ LiDAR
สถานการณ์การใช้งาน LiDAR
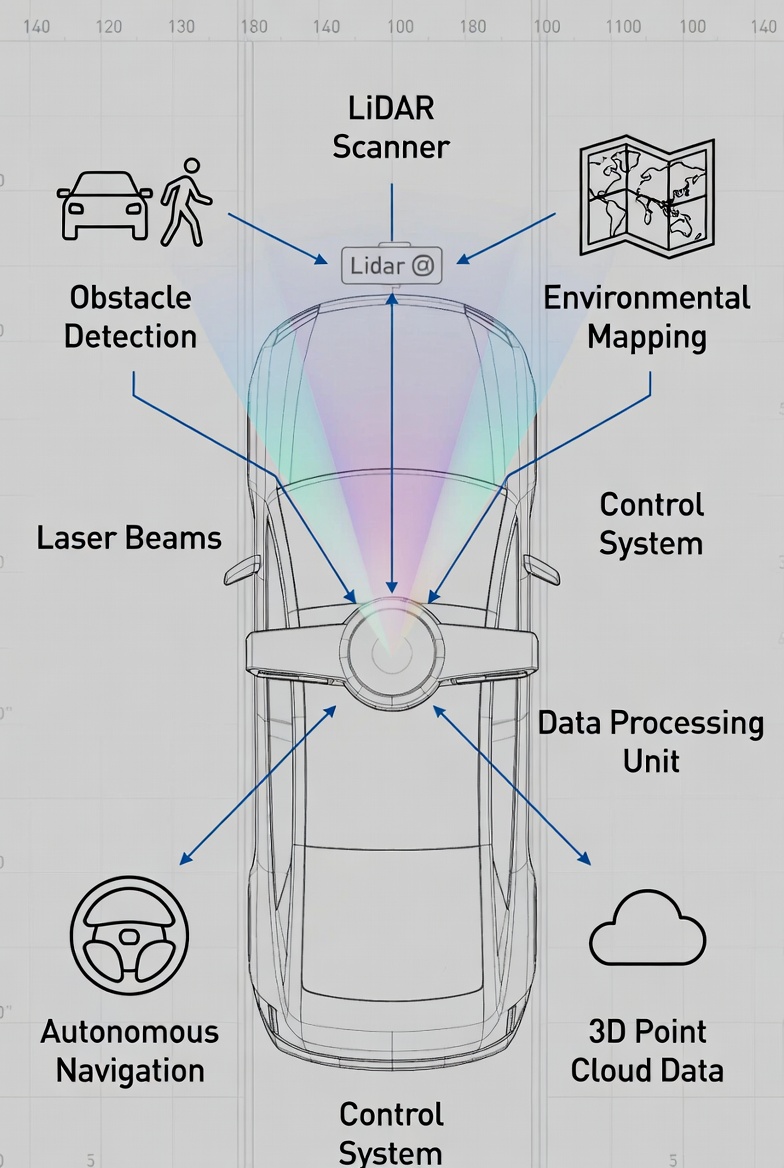
รูปที่ 4 แอปพลิเคชัน LiDAR ในระบบอัตโนมัติ
เทคโนโลยี LiDAR กลายเป็นสิ่งจําเป็นในแอพพลิเคชั่นตรวจจับขั้นสูงหลายอย่าง
ยานพาหนะไร้คนขับ
LiDAR ช่วยให้ยานพาหนะสามารถตรวจจับสิ่งกีดขวาง ระบุขอบเขตถนน และสร้างแผนที่ 3 มิติแบบเรียลไทม์ของสภาพแวดล้อม
หุ่นยนต์และระบบอัตโนมัติ
หุ่นยนต์อุตสาหกรรมและหุ่นยนต์เคลื่อนที่ใช้ LiDAR สําหรับ การแปลและการทําแผนที่พร้อมกัน (SLAM)
การทําแผนที่เชิงพื้นที่
ระบบ LiDAR ในอากาศสร้างแผนที่ภูมิประเทศความละเอียดสูงที่ใช้ใน:
- การสร้างแบบจําลองภูมิประเทศ
- การวางแผนโครงสร้างพื้นฐาน
- การวิเคราะห์ความเสี่ยงจากน้ําท่วม
การตรวจสอบป่าไม้และสิ่งแวดล้อม
LiDAR แทรกซึมชั้นพืชพรรณเพื่อวัด:
- โครงสร้างหลังคา
- ความสูงของต้นไม้
- ระดับความสูงของภูมิประเทศใต้ป่า
เมืองอัจฉริยะและโครงสร้างพื้นฐาน
นักวางผังเมืองใช้ LiDAR เพื่อสร้าง โมเดลเมือง 3 มิติที่มีความแม่นยําสูง สําหรับการจําลองและการวางแผน
10. ปัจจัยสําคัญในการเลือกระบบ LiDAR
การเลือกระบบ LiDAR ที่ถูกต้องจําเป็นต้องสร้างสมดุลระหว่างประสิทธิภาพ การผสานรวม และข้อจํากัดด้านต้นทุน
ช่วงการตรวจจับ
ช่วงเป็นตัวกําหนดว่าเซ็นเซอร์สามารถตรวจจับวัตถุได้อย่างน่าเชื่อถือเพียงใด ระบบขับเคลื่อนอัตโนมัติมักต้องใช้ 150–300 เมตร
ความละเอียดเชิงมุม
ความละเอียดที่สูงขึ้นส่งผลให้พอยต์คลาวด์หนาแน่นขึ้นและการจดจําวัตถุที่ดีขึ้น
มุมมอง (FOV)
FOV แนวนอนและแนวตั้งที่กว้างช่วยเพิ่มความตระหนักด้านสิ่งแวดล้อม
อัตราเฟรม
ความถี่ในการสแกนที่สูงขึ้นช่วยให้ตรวจจับวัตถุที่เคลื่อนไหวได้เร็วขึ้น
ขนาดและการบูรณาการ
เซ็นเซอร์ขนาดกะทัดรัดมีความสําคัญต่อโดรน หุ่นยนต์ และระบบฝังตัว
การใช้พลังงาน
การออกแบบที่ใช้พลังงานต่ําเป็นสิ่งจําเป็นสําหรับอุปกรณ์พกพาและอุปกรณ์ที่ใช้พลังงานจากแบตเตอรี่
คําถามที่พบบ่อย
เหตุใดระบบ LiDAR โซลิดสเตตจึงเป็นที่นิยมมากขึ้น
LiDAR โซลิดสเตตกําจัดชิ้นส่วนกลไก ปรับปรุงความน่าเชื่อถือ พร้อมลดต้นทุนการผลิตผ่านกระบวนการผลิตเซมิคอนดักเตอร์
LiDAR เชิงกลให้ความแม่นยําที่ดีกว่าหรือไม่?
LiDAR แบบกลไกมักจะให้ความละเอียดเชิงมุมที่สูงขึ้นและครอบคลุมการสแกนที่กว้างขึ้น ซึ่งอาจส่งผลให้พอยต์คลาวด์มีรายละเอียดมากขึ้น
ความยาวคลื่นใดที่ใช้กันทั่วไปในระบบ LiDAR
ระบบ LiDAR ส่วนใหญ่ทํางานที่ความยาวคลื่น 905 นาโนเมตรหรือ 1550 นาโนเมตร เนื่องจากความปลอดภัยและคุณสมบัติการส่งผ่านในบรรยากาศ
LiDAR สามารถทํางานในสภาพอากาศเลวร้ายได้หรือไม่?
ประสิทธิภาพอาจลดลงในฝนตกหนัก หมอก หรือหิมะ เนื่องจากอนุภาคในอากาศจะกระจายแสงเลเซอร์และลดความแรงของสัญญาณ
สรุป
LiDAR ได้กลายเป็นเทคโนโลยีการตรวจจับพื้นฐานสําหรับระบบอัตโนมัติที่ทันสมัยและแอปพลิเคชันการทําแผนที่เชิงพื้นที่ Mechanical LiDAR ให้การสแกน 360 องศาความละเอียดสูง และในอดีตเป็นสถาปัตยกรรมที่โดดเด่นในแพลตฟอร์มการวิจัยและการทําแผนที่ อย่างไรก็ตาม การเพิ่มขึ้นของเทคโนโลยีที่ใช้เซมิคอนดักเตอร์ได้เร่งการนํา LiDAR โซลิดสเตตมาใช้ เนื่องจากขนาดที่กะทัดรัด ความน่าเชื่อถือ และความสามารถในการปรับขนาด
สําหรับวิศวกรและนักออกแบบระบบ การเลือกโซลูชัน LiDAR ที่เหมาะสมจําเป็นต้องพิจารณาอย่างรอบคอบเกี่ยวกับ ช่วง ความละเอียด ขอบเขตการมองเห็น การใช้พลังงาน และข้อจํากัดในการผสานรวม ในขณะที่การผลิตโฟโตนิกส์และเซมิคอนดักเตอร์ยังคงก้าวหน้าอย่างต่อเนื่อง LiDAR แบบโซลิดสเตตคาดว่าจะมีบทบาทสําคัญมากขึ้นในแพลตฟอร์มการตรวจจับยุคหน้า