

คู่มือการเลือกเซ็นเซอร์ไจโรสโคป: วิธีเลือกไจโรสโคป MEMS ที่เหมาะสมสําหรับการใช้งานของคุณ
การเลือกเซ็นเซอร์ไจโรสโคปที่เหมาะสมจําเป็นต้องเข้าใจการแลกเปลี่ยนระหว่างช่วงการวัด ความไว ประสิทธิภาพเสียงรบกวน และการใช้พลังงาน คู่มือนี้จะแนะนําคุณเกี่ยวกับพารามิเตอร์ทางเทคนิคที่สําคัญ เกณฑ์การคัดเลือกเฉพาะแอปพลิเคชัน และข้อควรพิจารณาในการออกแบบที่ส่งผลโดยตรงต่อประสิทธิภาพของระบบในแอปพลิเคชันการตรวจจับการเคลื่อนไหว
สารบัญ
- บทนํา: คู่มือนี้ครอบคลุมอะไรบ้าง
- [อธิบายพารามิเตอร์ทางเทคนิคที่สําคัญ] (#2-key-technical-parameters-explained)
- [วิธีเลือกเซ็นเซอร์ไจโรสโคปที่เหมาะสม] (# 3 วิธีเลือกเซ็นเซอร์ไจโรสโคปด้านขวา)
- [การเปรียบเทียบประสิทธิภาพตามแอปพลิเคชัน] (#4-การเปรียบเทียบประสิทธิภาพตามแอปพลิเคชัน)
- [ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไป] (#5-ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไป)
- [ข้อควรพิจารณาเกี่ยวกับห่วงโซ่อุปทานและการจัดหา] (#6-ข้อควรพิจารณาเกี่ยวกับห่วงโซ่อุปทานและการจัดหา)
- คําถามที่พบบ่อย
- สรุป
1. บทนํา: คู่มือนี้ครอบคลุมอะไรบ้าง
เซ็นเซอร์ไจโรสโคปวัดความเร็วเชิงมุมและเป็นส่วนประกอบสําคัญในระบบติดตามการเคลื่อนไหวที่ทันสมัย ตั้งแต่การหมุนหน้าจอสมาร์ทโฟนไปจนถึงการควบคุมเสถียรภาพของยานยนต์และการรักษาเสถียรภาพการบินของโดรน ไจโรสโคป MEMS ได้กลายเป็นโซลูชันมาตรฐานเนื่องจากมีขนาดกะทัดรัด
คู่มือนี้เขียนขึ้นสําหรับวิศวกรออกแบบ ทีม R&D และผู้จัดการฝ่ายจัดซื้อที่ต้องการเลือกเซ็นเซอร์ไจโรสโคปสําหรับการใช้งานเฉพาะ แทนที่จะให้ภาพรวมทั่วไปของเทคโนโลยีไจโรสโคป เรามุ่งเน้นไปที่วิธีการคัดเลือก การแลกเปลี่ยนพารามิเตอร์ และการพิจารณาการออกแบบที่ใช้งานได้จริงตามข้อกําหนดทางวิศวกรรมในโลกแห่งความเป็นจริง
ไม่ว่าคุณจะออกแบบ IMU สําหรับหุ่นยนต์อุตสาหกรรม เพิ่มการตรวจจับการเคลื่อนไหวให้กับอุปกรณ์สวมใส่ หรือใช้ระบบป้องกันภาพสั่นไหวใน gimbal ของกล้อง การทําความเข้าใจว่าข้อมูลจําเพาะของไจโรสโคปแปลเป็นประสิทธิภาพของระบบอย่างไรเป็นสิ่งสําคัญ เราครอบคลุมพารามิเตอร์ที่สําคัญที่สุดสําหรับการใช้งานของคุณข้อผิดพลาดในการเลือกทั่วไปและวิธีตรวจสอบตัวเลือกของคุณผ่านการทดสอบและการตรวจสอบการออกแบบที่เหมาะสม
2. อธิบายพารามิเตอร์ทางเทคนิคที่สําคัญ
การทําความเข้าใจข้อมูลจําเพาะของไจโรสโคปจําเป็นต้องมีมากกว่าค่าของแผ่นข้อมูลเพื่อทําความเข้าใจว่าแต่ละพารามิเตอร์ส่งผลต่อประสิทธิภาพของระบบของคุณอย่างไร นี่คือพารามิเตอร์สําคัญที่ขับเคลื่อนการตัดสินใจเลือก
ช่วงการวัดและช่วงเต็มสเกล
ช่วงการวัด ซึ่งโดยทั่วไปจะระบุเป็นองศาต่อวินาที (°/s หรือ dps) กําหนดความเร็วเชิงมุมสูงสุดที่เซ็นเซอร์สามารถวัดได้ ช่วงทั่วไป ได้แก่ ±250, ±500, ±1000 และ ±2000 dps กุญแจสําคัญคือการจับคู่ช่วงกับความเร็วในการหมุนที่คาดหวังของแอปพลิเคชันของคุณ แอปพลิเคชั่นหมุนหน้าจอสมาร์ทโฟนแทบจะไม่เกิน 500 dps ในขณะที่โดรนที่ทําการซ้อมรบที่ก้าวร้าวอาจต้องใช้ 2000 dps หรือสูงกว่า
การเลือกช่วงที่กว้างเกินไปสําหรับแอปพลิเคชันของคุณจะลดความละเอียดที่มีประสิทธิภาพ การกระจายไปในช่วงที่กว้างขึ้นหมายความว่า LSB แต่ละตัวแสดงถึงการเพิ่มความเร็วเชิงมุมที่มากขึ้น สําหรับการใช้งานที่มีความแม่นยํา ให้ใช้ช่วงที่แคบที่สุดที่รองรับอัตราเชิงมุมสูงสุดที่คาดไว้บวกกับระยะขอบที่เหมาะสม
ความไวและความละเอียด
ความไวแสดงเป็น LSB/dps (บิตที่มีนัยสําคัญน้อยที่สุดต่อองศาต่อวินาที) หรือ mV/dps สําหรับเอาต์พุตแบบอะนาล็อก ความไวที่สูงขึ้นให้ความละเอียดที่ดีขึ้นสําหรับการตรวจจับการเคลื่อนไหวเชิงมุมขนาดเล็ก อย่างไรก็ตาม ความไวเพียงอย่างเดียวไม่ได้กําหนดความแม่นยําของระบบ แต่คุณต้องคํานึงถึงความหนาแน่นของสัญญาณรบกวนและความเสถียรของอคติด้วย
ความละเอียดขึ้นอยู่กับทั้งความลึกของบิต ADC และช่วงการวัดที่เลือก ไจโรสโคป 16 บิตที่มีช่วง ±250 dps ให้ประมาณ 0.0076 dps ต่อ LSB ในขณะที่เซ็นเซอร์เดียวกันที่กําหนดค่าสําหรับ ±2000 dps ให้เพียง 0.061 dps ต่อ LSB ความแตกต่างของความละเอียดแปดเท่านี้มีความสําคัญอย่างยิ่งสําหรับการใช้งานที่ต้องการการติดตามตําแหน่งเชิงมุมที่แม่นยําผ่านการผสานรวม
ความหนาแน่นของเสียงรบกวนและความเบี่ยงเบนของอัลลัน
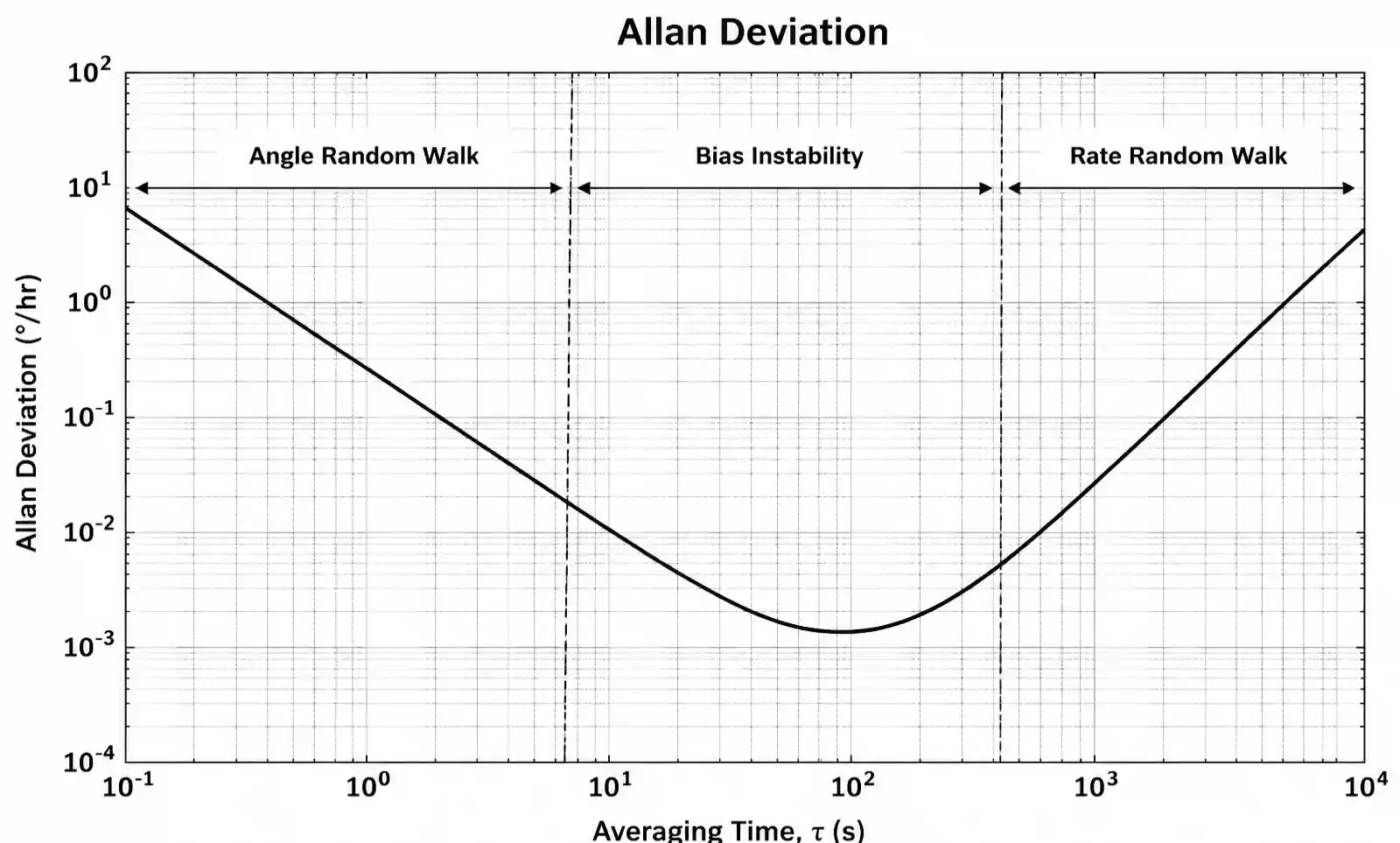
ความหนาแน่นของสัญญาณรบกวนที่วัดเป็น °/s/√Hz หรือ mdps/√Hz เป็นลักษณะเฉพาะของพื้นสัญญาณรบกวนของเซ็นเซอร์ทั่วทั้งสเปกตรัมความถี่ ความหนาแน่นของสัญญาณรบกวนที่ต่ําลงช่วยให้สามารถตรวจจับความเร็วเชิงมุมที่เล็กลงและปรับปรุงความแม่นยําของมุมเมื่อรวมเอาต์พุตไจโรสโคปเมื่อเวลาผ่านไป สําหรับการใช้งานที่มีความแม่นยําสูง เช่น อุปกรณ์สํารวจหรือระบบชี้เสาอากาศ โดยทั่วไปจะต้องมีความหนาแน่นของสัญญาณรบกวนต่ํากว่า 0.01 °/s/√Hz
พล็อตเบี่ยงเบนอัลลันให้มุมมองที่ครอบคลุมของลักษณะเสียงไจโรสโคปในช่วงเวลาการรวมที่แตกต่างกัน พล็อตเผยให้เห็นมุมการเดินแบบสุ่ม (เสียงระยะสั้น) ความไม่เสถียรของอคติ (เสียงกะพริบในช่วงเวลาปานกลาง) และอัตราการเดินแบบสุ่ม (การดริฟท์ระยะยาว) การทําความเข้าใจลักษณะเหล่านี้เป็นสิ่งสําคัญสําหรับการใช้งานที่เกี่ยวข้องกับการคํานวณที่ตายแล้วหรือการประมาณทัศนคติในระยะยาว
เอาต์พุตอัตราศูนย์และความเสถียรของอคติ
เอาต์พุตอัตราศูนย์ (ZRO) หรือที่เรียกว่าออฟเซ็ตหรืออคติ คือเอาต์พุตเซ็นเซอร์เมื่อไม่มีการหมุน สามารถปรับเทียบออฟเซ็ตเริ่มต้นเมื่อเปิดเครื่องได้ แต่ความไม่เสถียรของอคติ - การเบี่ยงเบนของออฟเซ็ตเมื่อเวลาผ่านไปและอุณหภูมิ - ส่งผลโดยตรงต่อความแม่นยําของระบบ โดยทั่วไปความไม่เสถียรของอคติจะระบุเป็น °/h (องศาต่อชั่วโมง) และแสดงถึงอัตราการเบี่ยงเบนต่ําสุดที่ทําได้หลังจากการสอบเทียบ
สําหรับแอปพลิเคชันการนําทาง ความเสถียรของอคติมักเป็นปัจจัยจํากัดในความแม่นยําของตําแหน่ง ไจโรสโคปที่มีความไม่เสถียรของอคติ 10 °/h จะสะสมข้อผิดพลาดประมาณ 240 องศาในช่วง 24 ชั่วโมงหากไม่ได้รับการแก้ไข ไจโรสโคป MEMS ระดับผู้บริโภคมักแสดงความไม่เสถียรของอคติ 5-50 °/h ในขณะที่อุปกรณ์ระดับยุทธวิธีมี 0.1-10 °/h และเซ็นเซอร์ระดับการนําทางต่ํากว่า 0.01 °/h
แบนด์วิดท์และอัตราข้อมูลเอาต์พุต
แบนด์วิดท์กําหนดช่วงความถี่ของอินพุตอัตราเชิงมุมที่เซ็นเซอร์สามารถวัดได้อย่างแม่นยํา สําหรับแอปพลิเคชันการตรวจจับการเคลื่อนไหวส่วนใหญ่แบนด์วิดท์ 50-100 Hz ก็เพียงพอที่จะจับการเคลื่อนไหวของมนุษย์หรือการเคลื่อนไหวของหุ่นยนต์ที่ช้า แอพพลิเคชั่นความเร็วสูง เช่น การวิเคราะห์การสั่นสะเทือนหรือการตรวจจับแรงกระแทกต้องการแบนด์วิดท์ที่กว้างขึ้น ซึ่งมักจะเป็น 200 Hz หรือสูงกว่า
อัตราข้อมูลเอาต์พุต (ODR) ต้องมีแบนด์วิดท์สัญญาณอย่างน้อยสองเท่าตามเกณฑ์ Nyquist แต่โดยทั่วไปแล้วระบบที่ใช้งานได้จริงจะใช้การสุ่มตัวอย่างเกิน 4-10 เท่าเพื่อการกรองแบบดิจิทัลที่มีประสิทธิภาพและการลดสัญญาณรบกวน ODR ทั่วไปมีตั้งแต่ 100 Hz สําหรับการใช้งานที่ใช้พลังงานต่ําถึง 8 kHz สําหรับระบบประสิทธิภาพสูง โปรดทราบว่า ODR ที่สูงขึ้นจะเพิ่มการใช้พลังงานและข้อกําหนดในการประมวลผลข้อมูล
3. วิธีการเลือกเซ็นเซอร์ไจโรสโคปที่เหมาะสม
การเลือกไจโรสโคปจําเป็นต้องทําแผนที่ข้อกําหนดการใช้งานกับข้อมูลจําเพาะของเซ็นเซอร์ผ่านกระบวนการประเมินอย่างเป็นระบบ นี่คือวิธีการปฏิบัติตามประสบการณ์การออกแบบในหลายโดเมน
ขั้นตอนที่ 1: กําหนดข้อกําหนดการสมัคร
เริ่มต้นด้วยการหาปริมาณความต้องการของระบบของคุณในแง่วิศวกรรม ความเร็วเชิงมุมสูงสุดที่คุณต้องวัดคือเท่าไร? คุณต้องรักษาความแม่นยําของตําแหน่งเชิงมุมเท่าใด และในช่วงเวลาใด? สภาพแวดล้อมใดบ้างที่เซ็นเซอร์ต้องทนต่อ (ช่วงอุณหภูมิ การกระแทก การสั่นสะเทือน) มีงบประมาณด้านพลังงานเท่าไร?
ตัวอย่างเช่น แอปพลิเคชันสมาร์ทโฟนอาจต้องการ: ช่วง ±500 dps, ความแม่นยํา 1° สําหรับการหมุนหน้าจอ, การทํางาน -20°C ถึง 60°C, การใช้กระแสไฟเฉลี่ยน้อยกว่า 1 mA เซ็นเซอร์ข้อต่อหุ่นยนต์อุตสาหกรรมอาจต้องการ: ช่วง ±250 dps, ความแม่นยําของตําแหน่ง 0.1° ในการทํางานต่อเนื่อง, -40°C ถึง 85°C, ความทนทานต่อแรงกระแทกถึง 10,000 กรัม และการตรวจจับความล้มเหลวซ้ําซ้อน
ขั้นตอนที่ 2: เลือกช่วงการวัด
เลือกช่วงการวัดที่แคบที่สุดที่รองรับอัตราเชิงมุมสูงสุดที่คาดไว้โดยมีระยะขอบความปลอดภัย 20-30% หากแอปพลิเคชันของคุณเกี่ยวข้องกับการหมุนสูงสุด 300 dps ให้เลือกเซ็นเซอร์ ±500 dps แทนที่จะเป็น ±2000 dps สิ่งนี้จะรักษาความละเอียดและอัตราส่วนสัญญาณต่อเสียงรบกวน
สําหรับการใช้งานที่มีความเร็วเชิงมุมแตกต่างกันอย่างมาก ให้พิจารณาเซ็นเซอร์ที่มีช่วงที่ตั้งโปรแกรมได้ ไจโรสโคป MEMS ที่ทันสมัยจํานวนมากช่วยให้สามารถเลือกช่วงที่กําหนดค่าได้ด้วยซอฟต์แวร์ ช่วยให้คุณสามารถปรับความละเอียดให้เหมาะสมแบบไดนามิกตามสภาพการทํางาน
ขั้นตอนที่ 3: ประเมินประสิทธิภาพเสียงรบกวน
คํานวณงบประมาณข้อผิดพลาดมุมจากการรวมเสียงรบกวน หากแอปพลิเคชันของคุณรวมเอาต์พุตไจโรสโคปเพื่อประเมินมุมความหนาแน่นของสัญญาณรบกวนและความเสถียรของอคติจะกลายเป็นสิ่งสําคัญ ใช้ข้อกําหนดส่วนเบี่ยงเบนของอัลลันเพื่อประเมินการเบี่ยงเบนตลอดเวลาการทํางานที่คุณต้องการ
การประมาณอย่างรวดเร็ว: การเดินแบบสุ่มมุม (เป็น°/√ชม.) คูณด้วยรากที่สองของเวลาในการวัด (เป็นชั่วโมง) จะให้มุมที่คาดว่าจะดริฟท์จากสัญญาณรบกวน สําหรับการทํางาน 10 นาทีด้วยการเดินแบบสุ่มมุม 0.1 °/√ ชม. คาดว่าจะมีการดริฟท์ประมาณ 0.04° จากแหล่งกําเนิดเสียงนี้เพียงอย่างเดียว
ขั้นตอนที่ 4: ประเมินความเสถียรของอุณหภูมิ
ความไวต่ออุณหภูมิส่งผลต่อทั้งออฟเซ็ตและสเกลแฟกเตอร์ Review ข้อมูลจําเพาะของค่าสัมประสิทธิ์อุณหภูมิ: อคติเทียบกับอุณหภูมิ (°/s/°C) และการเปลี่ยนแปลงความไวตามอุณหภูมิ (ppm/°C หรือ %/°C) สําหรับการใช้งานกลางแจ้งหรือระบบที่มีความร้อนในตัวอย่างมีนัยสําคัญการชดเชยอุณหภูมิจึงกลายเป็นสิ่งจําเป็น
ไจโรสโคปบางตัวมีเซ็นเซอร์อุณหภูมิภายในและให้ค่าสัมประสิทธิ์การชดเชยที่สอบเทียบจากโรงงานในการลงทะเบียนอุปกรณ์ การใช้การชดเชยนี้ในเฟิร์มแวร์ของคุณสามารถลดข้อผิดพลาดที่เกิดจากอุณหภูมิได้ถึง 5-10 เท่าเมื่อเทียบกับการทํางานที่ไม่ได้รับการชดเชย
4. การเปรียบเทียบประสิทธิภาพตามการใช้งาน
การใช้งานที่แตกต่างกันจัดลําดับความสําคัญของลักษณะไจโรสโคปที่แตกต่างกัน การเปรียบเทียบนี้ช่วยให้คุณระบุได้ว่าข้อมูลจําเพาะใดมีความสําคัญมากที่สุดสําหรับกรณีการใช้งานของคุณ
| ใบสมัคร | ช่วงการวัด | ตัวชี้วัดประสิทธิภาพหลัก | ความเสถียรของอคติทั่วไป | Synology Inc. งบประมาณด้านพลังงาน | ตัวอย่างอะไหล่ |
|---|---|---|---|---|---|
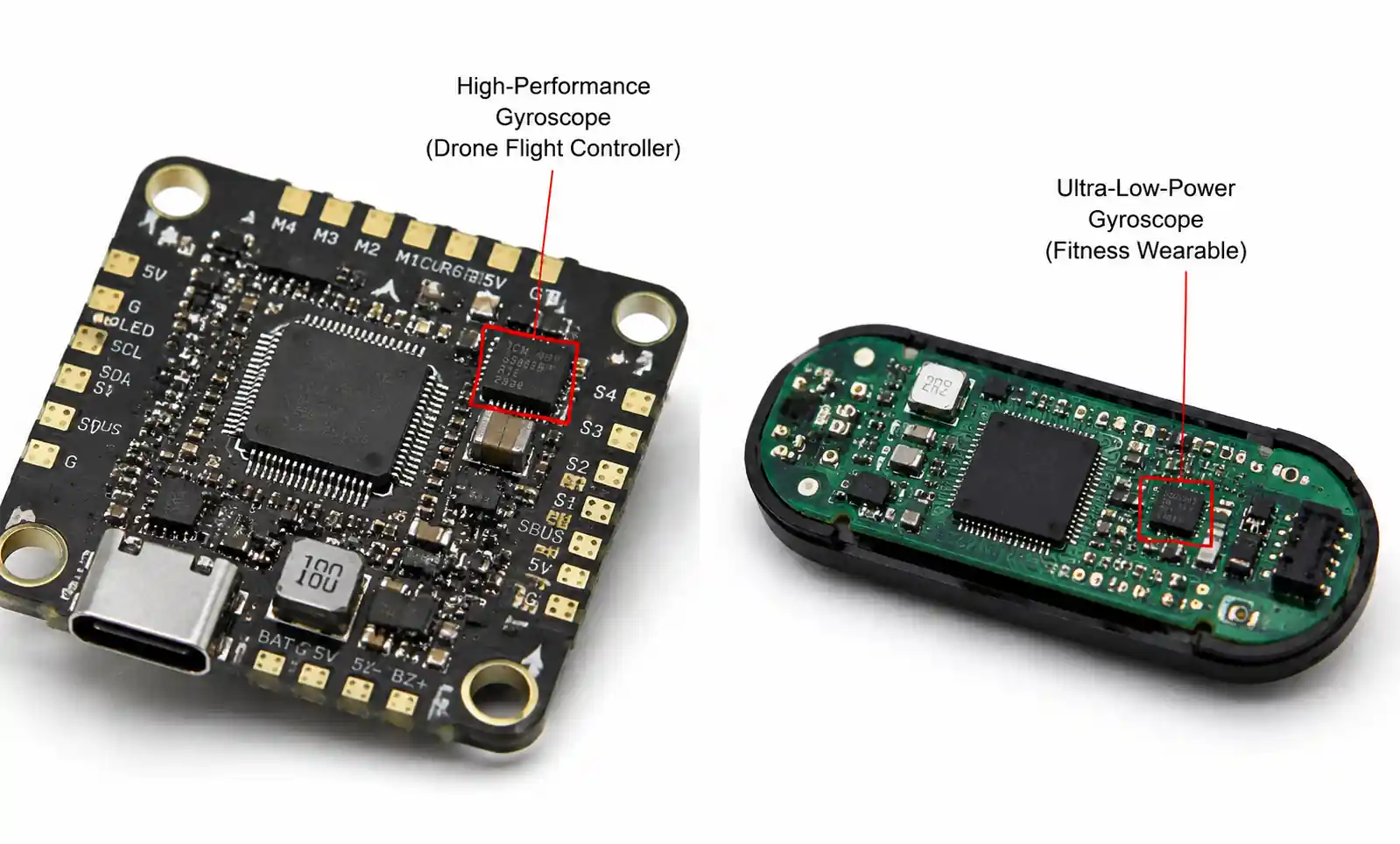
| สมาร์ทโฟน / แท็บเล็ต | ±500 ถึง ±2000 dps | การใช้พลังงาน | 5-20 °/ชม. <1 มิลลิแอมป์ | BMI270, ICM-42605 | มิซูมิ |
| โดรน / UAV | ±2000 ถึง ±4000 dps | มิซูมิ อัตราการอัปเดตความทนทานต่อแรงกระแทก | 10-30 °/ชม. 2-5 มิลลิแอมป์ | MPU-6500, BMI088 | เอ็มพียู-6500, BMI088 |
| หุ่นยนต์อุตสาหกรรม | Ukuker ±250 ถึง ±1000 dps | ความเสถียรของอคติ ความเป็นเส้นตรง | 2-10 °/ชม. ไม่สําคัญ | ADXRS645, L3GD20H | |
| ยานยนต์ (ADAS/ESC) | ±300 ถึง ±500 dps | ความเสถียรของอุณหภูมิ AEC-Q100 | AEC-Q100 | AEC-Q100 1-5 °/ชม. <3 มิลลิแอมป์ | ค่าดัชนีมวลกาย 260, LSM6DSO32 |
| ระบบป้องกันภาพสั่นไหวของกล้อง | Silgo Thailand ±125 ถึง ±500 dps | ความหนาแน่นของเสียงรบกวน แบนด์วิดท์ | มิซูมิ 5-15 °/ชม. <2 มิลลิแอมป์ | LSM6DS3TR-C, BMG250 | ประเทศไทย |
| ฟิตเนสที่สวมใส่ได้ ±500 ถึง ±1000 dps | พลังงานต่ําเป็นพิเศษ | 10-30 °/ชม. <0.5 มิลลิแอมป์ | BMA456, KX126-1063 | กทม. |
ตารางนี้เน้นการแลกเปลี่ยนพารามิเตอร์ในแอปพลิเคชันต่างๆ การเคลื่อนไหวความเร็วสูง (โดรน) ต้องการช่วงการวัดที่กว้างและอัตราการอัปเดตที่รวดเร็ว แต่สามารถทนต่อเสียงรบกวนและการใช้พลังงานที่สูงขึ้นได้ การใช้งานที่มีความแม่นยํา (หุ่นยนต์ การสํารวจ) ต้องการความเสถียรของอคติที่ดีเยี่ยมและเสียงรบกวนต่ํา แต่ทํางานในอัตราเชิงมุมปานกลาง อุปกรณ์ที่ใช้พลังงานจากแบตเตอรี่ (อุปกรณ์สวมใส่) ให้ความสําคัญกับการใช้พลังงานมากกว่าความแม่นยําสัมบูรณ์
เมื่อประเมินไจโรสโคปสําหรับการใช้งานของคุณ ให้ระบุข้อกําหนดที่ไม่สามารถต่อรองได้ก่อน หากคุณต้องมีคุณสมบัติตรงตาม AEC-Q100 สําหรับการใช้งานยานยนต์ นั่นจะทําให้ตัวเลือกของคุณแคบลงทันที หากคุณมีงบประมาณพลังงาน 200 μA สําหรับการตรวจจับการเคลื่อนไหวตลอดเวลา ข้อจํากัดนั้นจะขับเคลื่อนการเลือกเซ็นเซอร์มากกว่าพารามิเตอร์ประสิทธิภาพใดๆ
| ลําดับความสําคัญในการเลือก | แอพพลิเคชั่นหลัก | การพิจารณารอง |
|---|---|---|
| ความหนาแน่นของเสียงรบกวน < 0.01 °/s/√Hz | การนําทาง การสํารวจ หุ่นยนต์ที่มีความแม่นยํา | ความเสถียรของอคติ ประสิทธิภาพอุณหภูมิ |
| ความเสถียรของอคติ < 5 °/ชม. | การคํานวณตาย การติดตามทัศนคติเป็นเวลานาน | ความหนาแน่นของเสียงรบกวน ความทนทานต่อแรงกระแทก |
| กําลังไฟ < 500 μA | อุปกรณ์สวมใส่, เซ็นเซอร์ IoT, อุปกรณ์ที่ใช้พลังงานจากแบตเตอรี่ | ช่วงการวัด, ความยืดหยุ่นของอัตราข้อมูล |
| อุณหภูมิในการทํางาน -40 ถึง 125°C | ยานยนต์ อุตสาหกรรม อุปกรณ์กลางแจ้ง คุณสมบัติการชดเชยอุณหภูมิ | มิซูมิ |
5. ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไป
การรวมไจโรสโคปที่เหมาะสมต้องให้ความสนใจกับเค้าโครง PCB การออกแบบแหล่งจ่ายไฟขั้นตอนการสอบเทียบและการติดตั้งเชิงกล รายละเอียดการใช้งานเหล่านี้มักจะกําหนดว่าคุณบรรลุประสิทธิภาพของแผ่นข้อมูลในระบบของคุณหรือไม่
เค้าโครง PCB และการติดตั้งทางกล
ติดตั้งไจโรสโคปให้ใกล้กับจุดศูนย์กลางการหมุนของระบบมากที่สุด การติดตั้งนอกศูนย์กลางแนะนําส่วนประกอบการเร่งความเร็วแบบแปลที่จับคู่กับการอ่านค่าไจโรสโคป โดยเฉพาะอย่างยิ่งระหว่างการเคลื่อนที่เชิงเส้นและการหมุนรวมกัน สําหรับไจโรสโคปที่ติดตั้งห่างจากศูนย์กลางการหมุน 5 ซม. ความเร่งเชิงเส้น 1g จะสร้างข้อผิดพลาดความเร็วเชิงมุมที่ชัดเจนประมาณ 2 rad/s (115 dps) ซึ่งมีความสําคัญสําหรับการใช้งานหลายประเภท
การติดตั้งทางกลที่ปลอดภัยเป็นสิ่งสําคัญ ความยืดหยุ่นหรือการเล่นในการติดตั้งทําให้เซ็นเซอร์สัมผัสกับการสั่นสะเทือนในพื้นที่ที่แตกต่างจากเป้าหมายการวัดที่ตั้งใจไว้ ใช้การติดตั้งสี่จุดสําหรับแพ็คเกจขนาดใหญ่ และตรวจดูให้แน่ใจว่า PCB นั้นรองรับอย่างแน่นหนา สําหรับสภาพแวดล้อมที่มีการสั่นสะเทือนสูง ให้พิจารณาตัวยึดแยกการสั่นสะเทือน แต่ตระหนักว่าสิ่งนี้อาจทําให้เกิดความล่าช้าของเฟสในการตอบสนองแบบไดนามิก
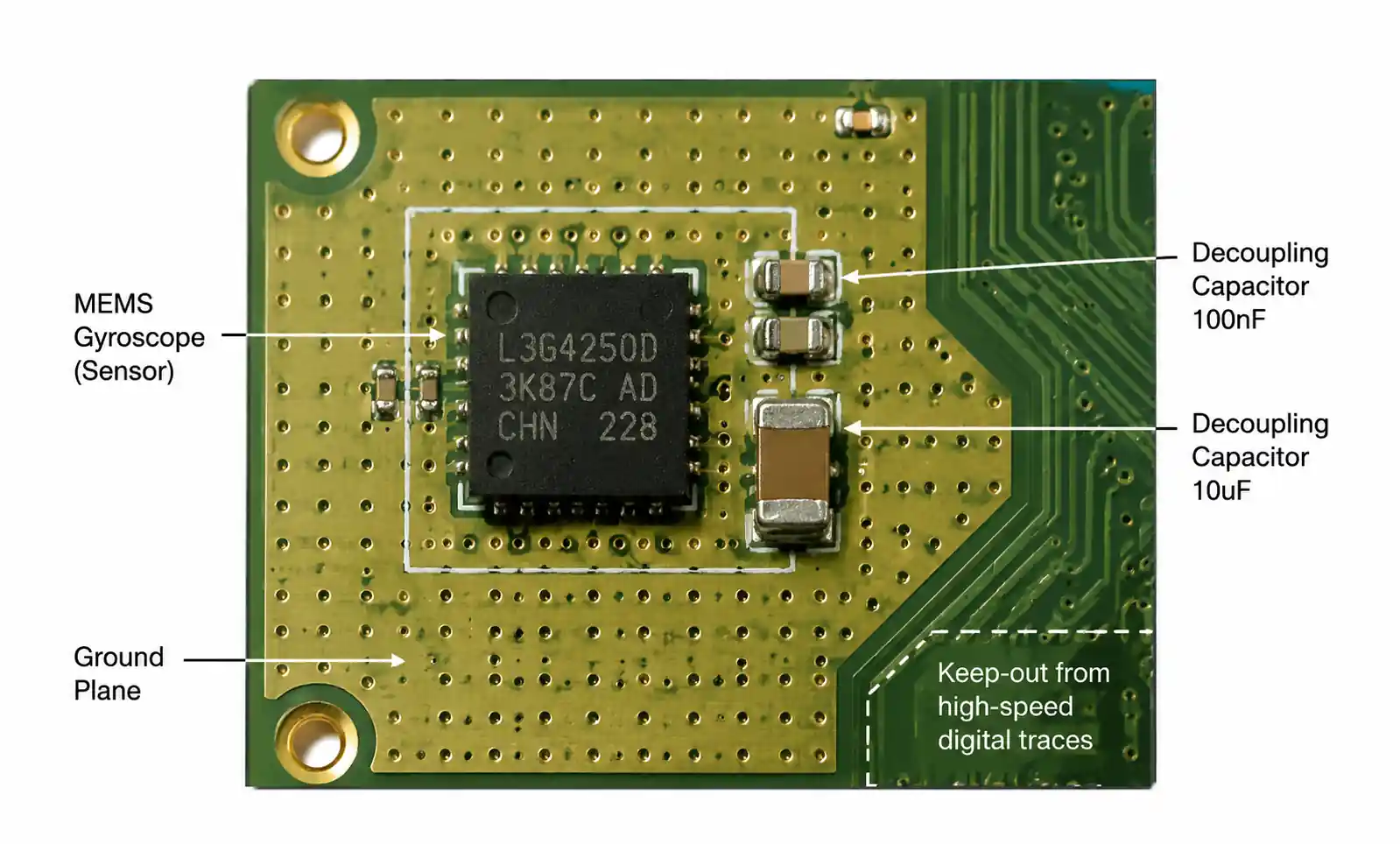
ให้ความสนใจกับการกําหนดเส้นทาง PCB ใกล้กับไจโรสโคป เก็บสัญญาณดิจิตอลความเร็วสูงและแหล่งจ่ายไฟแบบสวิตชิ่งให้ห่างจากเซ็นเซอร์เพื่อลดการรบกวนทางแม่เหล็กไฟฟ้า ใช้ระนาบกราวด์ที่มั่นคงใต้ไจโรสโคป และวางตัวเก็บประจุแบบแยกส่วนให้ใกล้กับหมุดจ่ายไฟมากที่สุด คําแนะนําทั่วไป ได้แก่ ตัวเก็บประจุเซรามิก 100 nF ภายในระยะ 2-3 มม. จากพิน VDD บวกกับตัวเก็บประจุจํานวนมาก 10 μF ในบริเวณใกล้เคียง
ข้อกําหนดของแหล่งจ่ายไฟ
ไจโรสโคป MEMS มีความไวต่อสัญญาณรบกวนของแหล่งจ่ายไฟ ซึ่งจับคู่โดยตรงกับวงจรตรวจจับแบบอะนาล็อก รักษาระลอกคลื่นของแหล่งจ่ายไฟให้ต่ํากว่า 50 mV จากจุดสูงสุดถึงสูงสุด โดยเฉพาะอย่างยิ่งที่ต่ํากว่า 10 mV สําหรับการใช้งานที่มีความแม่นยําสูง ใช้ตัวควบคุม LDO เสียงรบกวนต่ําสําหรับไจโรสโคปโดยเฉพาะแทนที่จะใช้เอาต์พุตตัวควบคุมการสลับร่วมกับวงจรดิจิตอล
ลําดับการเปิดเครื่องมีความสําคัญสําหรับอุปกรณ์บางอย่าง ตรวจสอบเอกสารข้อมูลสําหรับข้อกําหนดใดๆ เกี่ยวกับแรงดันไฟฟ้า ramp อัตรา เวลาตกตะกอนก่อนการสื่อสารครั้งแรก หรือขั้นตอนการเริ่มต้น ไจโรสโคปจํานวนมากต้องใช้เวลา 10-100 มิลลิวินาทีหลังจากเปิดเครื่องก่อนที่ข้อมูลที่ถูกต้องจะพร้อมใช้งาน เนื่องจากวงจรภายในจะเสถียรและขั้นตอนการทดสอบตัวเองเสร็จสมบูรณ์
การสอบเทียบและการชดเชย
การสอบเทียบจากโรงงานให้ความแม่นยําพื้นฐาน แต่การสอบเทียบเฉพาะแอปพลิเคชันจะช่วยปรับปรุงประสิทธิภาพได้อย่างมาก อย่างน้อยที่สุด ให้ใช้รูทีนการสอบเทียบอัตราศูนย์ที่วัดออฟเซ็ตเมื่อระบบหยุดนิ่งและลบค่านี้ออกจากการอ่านที่ตามมา เพื่อผลลัพธ์ที่ดีที่สุด ให้ทําการสอบเทียบนี้หลังจากที่อุปกรณ์ถึงสมดุลทางความร้อน
การชดเชยอุณหภูมิช่วยลดการเบี่ยงเบนตลอดช่วงอุณหภูมิในการทํางาน วิธีที่ง่ายที่สุดจะจับค่าออฟเซ็ตที่จุดอุณหภูมิหลายจุดระหว่างการผลิต และจัดเก็บตารางการค้นหาการชดเชยหรือค่าสัมประสิทธิ์พหุนามในหน่วยความจําแบบไม่ลบเลือน วิธีการที่ซับซ้อนมากขึ้นยังชดเชยการเปลี่ยนแปลงของสเกลแฟกเตอร์และแกนที่ไม่ตรงแนวด้วยอุณหภูมิ
ความไวของแกนไขว้—การตอบสนองของเซ็นเซอร์ต่ออัตราเชิงมุมเกี่ยวกับแกนที่ไม่ใช่แกนหลัก—โดยทั่วไปจะอยู่ในช่วง 1% ถึง 5% ในไจโรสโคป MEMS สําหรับการใช้งานที่ต้องการการมีเพศสัมพันธ์ระหว่างแกนอย่างแน่นหนาหรือการวัดความเร็วเชิงมุม 3 มิติที่แม่นยํา ให้กําหนดลักษณะและชดเชยเอฟเฟกต์ข้ามแกนผ่านการแปลงเมทริกซ์การหมุน
ข้อผิดพลาดในการออกแบบทั่วไปที่ควรหลีกเลี่ยง
ข้อผิดพลาดที่พบบ่อยอย่างหนึ่งคือการประเมินผลกระทบของการสั่นสะเทือนต่อการอ่านค่าไจโรสโคปต่ําเกินไป การสั่นสะเทือนความถี่สูงสามารถเปลี่ยนเป็นแบนด์วิดท์การวัดสร้างอัตราเชิงมุมที่ชัดเจนซึ่งไม่สอดคล้องกับการหมุนจริง ใช้ฟิลเตอร์ลบรอยหยักก่อน ADC (สําหรับไจโรสโคปเอาต์พุตแบบอะนาล็อก) หรือใช้ฟิลเตอร์ดิจิตอลโลว์พาสในตัวของเซ็นเซอร์ที่กําหนดค่าอย่างเหมาะสมสําหรับแอปพลิเคชันของคุณ
ข้อผิดพลาดอีกประการหนึ่งคือการละเลยการดริฟท์การวอร์มอัพของไจโรสโคป ออฟเซ็ตเปลี่ยนแปลงอย่างมีนัยสําคัญในช่วงสองสามนาทีแรกหลังจากเปิดเครื่อง เนื่องจากอุปกรณ์จะร้อนขึ้นเองจากการกระจายพลังงานภายใน สําหรับการใช้งานที่ต้องการการอ่านค่าที่แม่นยําในทันทีหลังจากเปิดเครื่อง ให้รักษาไจโรสโคปให้อยู่ในโหมดสแตนด์บายพลังงานต่ําหรือกําหนดลักษณะการอุ่นเครื่องโปร file และชดเชยตามนั้น
ความล้มเหลวในการตรวจสอบประสิทธิภาพของไจโรสโคปภายใต้สภาวะการทํางานจริงอาจเป็นการกํากับดูแลที่ร้ายแรงที่สุด การทดสอบแบบตั้งโต๊ะที่อุณหภูมิห้องด้วยการหมุนแบบแมนนวลอย่างนุ่มนวลให้ความมั่นใจที่จํากัด ทดสอบการออกแบบของคุณในช่วงอุณหภูมิเต็ม ให้เกิดแรงกระแทกและการสั่นสะเทือนที่คาดไว้ files และตรวจสอบประสิทธิภาพในช่วงเวลาการทํางานที่ยาวนานเพื่อตรวจจับปัญหาเกี่ยวกับการเบี่ยงเบนของอคติและความไวต่อสิ่งแวดล้อม
6. ข้อควรพิจารณาเกี่ยวกับห่วงโซ่อุปทานและการจัดหา
ความพร้อมใช้งานของไจโรสโคป ระยะเวลารอคอยสินค้า และการจัดการวงจรชีวิตส่งผลกระทบอย่างมากต่อไทม์ไลน์การพัฒนาผลิตภัณฑ์และความสามารถในการปรับขนาดการผลิต การทําความเข้าใจภูมิทัศน์ของห่วงโซ่อุปทานช่วยลดความเสี่ยง
ซัพพลายเออร์รายใหญ่และตําแหน่งทางการตลาด
ตลาดไจโรสโคป MEMS ถูกครอบงําโดยซัพพลายเออร์หลักหลายราย: Bosch Sensortec, STMicroelectronics, TDK InvenSense (ปัจจุบันเป็นส่วนหนึ่งของ TDK), Analog Devices และ Murata แต่ละแห่งมีจุดแข็งที่แตกต่างกัน Bosch และ ST ให้ความสําคัญกับตลาดผู้บริโภคและยานยนต์เป็นอย่างมากด้วยชิ้นส่วนที่มีปริมาณมากและคุ้มค่า TDK InvenSense เป็นผู้บุกเบิกไจโรสโคป MEMS สําหรับผู้บริโภคจํานวนมาก Analog Devices นําเสนอตัวเลือกที่มีประสิทธิภาพสูงกว่าสําหรับการใช้งานในอุตสาหกรรมและความแม่นยํา
สําหรับสินค้าอุปโภคบริโภคที่มีปริมาณมาก ชิ้นส่วนจาก Bosch (ซีรีส์ BMI) และ ST (ซีรีส์ LSM) มักจะให้การผสมผสานที่ดีที่สุดระหว่างประสิทธิภาพ ต้นทุน และความพร้อมใช้งาน สําหรับการใช้งานยานยนต์ที่ต้องการคุณสมบัติ AEC-Q100 ST, Bosch และ TDK ล้วนมีพอร์ตโฟลิโอที่ผ่านการรับรอง การใช้งานในอุตสาหกรรมมักได้รับประโยชน์จากช่วงอุณหภูมิที่กว้างขึ้นของ Analog Devices และข้อผูกมัดในวงจรชีวิตที่ยาวนานขึ้น
ระยะเวลารอคอยสินค้าและการจัดการสินค้าคงคลัง
โดยทั่วไปแล้วเซ็นเซอร์ไจโรสโคปมาตรฐานจะมีระยะเวลารอคอยสินค้าตั้งแต่สต็อกสินค้าถึง 12-16 สัปดาห์ ขึ้นอยู่กับสภาวะตลาดและความผันผวนของอุปสงค์ ตัวแปรที่ผ่านการรับรองสําหรับยานยนต์มักจะมีระยะเวลารอคอยสินค้านานขึ้นเนื่องจากข้อกําหนดการทดสอบและคุณสมบัติเพิ่มเติม วางแผนระยะเวลารอคอยสินค้า 20-26 สัปดาห์สําหรับเซ็นเซอร์เกรดยานยนต์ในช่วงระยะเวลาการจัดหาที่คับแคบ
สําหรับการผลิตต้นแบบและปริมาณน้อย การซื้อจากผู้จัดจําหน่าย เช่น Digi-Key, Mouser หรือ Arrow จะให้ความพร้อมใช้งานทันที แต่มีต้นทุนต่อหน่วยที่สูงกว่า ปริมาณการผลิตที่สูงกว่า 10,000 หน่วยต่อปีมักจะแสดงให้เห็นถึงความสัมพันธ์โดยตรงกับซัพพลายเออร์ ซึ่งให้ราคา การมองเห็นระยะเวลารอคอยสินค้า และการเข้าถึงการสนับสนุนด้านเทคนิคที่ดีกว่า
| ซัพพลายเออร์ | โฟกัสผู้บริโภค เกรดยานยนต์ | เกรดอุตสาหกรรม | ขั้นต่ําทั่วไป (โดยตรง) | ระยะเวลารอคอยสินค้า (สต็อก) |
|---|---|---|---|---|
| Bosch Sensortec | บ๊อช สูง | สูง | ปานกลาง | 3,000-5,000 |
| STMicroelectronics | เอสทีมิโคร สูง | สูง | สูง | 2,500-5,000 |
| TDK InvenSense | ทีดีเค สูง | ปานกลาง | ปานกลาง | 5,000-10,000 |
| อุปกรณ์อนาล็อก | ปานกลาง | ปานกลาง | สูง | 1,000-2,500 |
| มูราตะ | ปานกลาง | สูง | สูง | 5,000-10,000 |
ความล้าสมัยและชิ้นส่วนทางเลือก
ไจโรสโคป MEMS มีวงจรชีวิตของผลิตภัณฑ์ตั้งแต่ 5-7 ปีสําหรับชิ้นส่วนที่เน้นผู้บริโภคไปจนถึง 10-15 ปีสําหรับอุปกรณ์ที่ผ่านการรับรองสําหรับอุตสาหกรรมและยานยนต์ ตรวจสอบภาระผูกพันเกี่ยวกับอายุการใช้งานที่ยาวนานของผลิตภัณฑ์ของผู้ผลิต โดยเฉพาะอย่างยิ่งสําหรับผลิตภัณฑ์ที่คาดว่าจะยังคงอยู่ในการผลิตเป็นเวลาหลายปี
ออกแบบสําหรับทางเลือกที่เข้ากันได้กับพินเมื่อเป็นไปได้ ไจโรสโคปจํานวนมากภายในตระกูลของซัพพลายเออร์ใช้พินเอาต์และโปรโตคอลการสื่อสารร่วมกัน ช่วยให้คุณสามารถเปลี่ยนเกรดประสิทธิภาพหรือรุ่นอื่นได้ด้วยการเปลี่ยนแปลง PCB น้อยที่สุด สําหรับการใช้งานที่สําคัญ ให้ตรวจสอบความถูกต้องของชิ้นส่วนทางเลือกอย่างน้อยหนึ่งชิ้นในระหว่างขั้นตอนการออกแบบ เพื่อให้คุณมีข้อมูลสํารองที่ผ่านการรับรองหากตัวเลือกหลักของคุณประสบกับข้อจํากัดด้านอุปทานหรือการหมดอายุการใช้งาน
เมื่อไจโรสโคปหมดอายุการใช้งาน ซัพพลายเออร์มักจะแจ้งให้ทราบล่วงหน้า 6-12 เดือนและเสนอโอกาสในการซื้อครั้งสุดท้าย เตรียมแผนการโยกย้ายให้พร้อม รวมถึงการเปลี่ยนแปลงเฟิร์มแวร์ที่จําเป็นเพื่อรองรับเซ็นเซอร์ทดแทนและการปรับเทียบใหม่ที่จําเป็นสําหรับแอปพลิเคชันของคุณ
7. คําถามที่พบบ่อย
ไจโรสโคปและมาตรความเร่งต่างกันอย่างไร
ไจโรสโคปวัดความเร็วเชิงมุม (อัตราการหมุน) รอบแกนตั้งแต่หนึ่งแกนขึ้นไป ในขณะที่มาตรความเร่งวัดความเร่งเชิงเส้น ไจโรสโคปจะตรวจจับว่าบางสิ่งหมุนเร็วเพียงใด ในขณะที่มาตรความเร่งจะตรวจจับการเปลี่ยนแปลงของความเร็วหรือการวางแนวที่สัมพันธ์กับแรงโน้มถ่วง ระบบตรวจจับการเคลื่อนไหวส่วนใหญ่รวมเซ็นเซอร์ทั้งสองไว้ใน IMU (Inertial Measurement Unit) เพื่อติดตามการเคลื่อนที่ทั้งเชิงเส้นและการหมุน การใช้เซ็นเซอร์ทั้งสองประเภทร่วมกันช่วยให้สามารถติดตามตําแหน่งและการวางแนวได้แม่นยํากว่าเซ็นเซอร์เพียงอย่างเดียว
ฉันจะแปลงเอาต์พุตไจโรสโคปเป็นมุมได้อย่างไร
เอาต์พุตของไจโรสโคปคือความเร็วเชิงมุม ซึ่งต้องรวมเข้าด้วยกันเมื่อเวลาผ่านไปเพื่อให้ได้มุม ในระบบที่ไม่ต่อเนื่อง ให้คูณการอ่านความเร็วเชิงมุมด้วยช่วงเวลาระหว่างตัวอย่างและรวมการเพิ่มขึ้นเหล่านี้ ตัวอย่างเช่น หากไจโรสโคปของคุณอ่านค่า 10 °/s และคุณสุ่มตัวอย่างที่ 100 Hz แต่ละตัวอย่างแสดงถึงการหมุน 0.1° อย่างไรก็ตาม การผสานรวมจะสะสมข้อผิดพลาดทั้งหมด รวมถึงสัญญาณรบกวนและการเบี่ยงเบนของอคติ ทําให้การประมาณมุมเบี่ยงเบนไปตามกาลเวลา ระบบที่ใช้งานได้จริงส่วนใหญ่หลอมรวมข้อมูลไจโรสโคปกับมาตรความเร่งหรือการอ่านค่าของเครื่องวัดสนามแม่เหล็กเพื่อผูกมัดการดริฟท์นี้
ข้อกําหนดความเสถียรของอคติมีความหมายอย่างไรสําหรับแอปพลิเคชันของฉัน
ความเสถียรของอคติแสดงถึงการเบี่ยงเบนของออฟเซ็ตอัตราศูนย์เมื่อเวลาผ่านไป ซึ่งโดยทั่วไปจะระบุเป็น °/h การดริฟท์นี้จะจํากัดระยะเวลาที่คุณสามารถรวมข้อมูลไจโรสโคปได้โดยตรงก่อนที่ข้อผิดพลาดของมุมสะสมจะไม่สามารถยอมรับได้ ไจโรสโคปที่มีความเสถียรของอคติ 10 °/h อาจลอย 10 องศาในหนึ่งชั่วโมงแม้ว่าจะอยู่กับที่อย่างสมบูรณ์ก็ตาม สําหรับการวัดระยะสั้น (วินาทีถึงนาที) ความเสถียรของอคติมีผลกระทบน้อยที่สุด สําหรับแอปพลิเคชันที่ต้องการการวางแนวที่แม่นยําเป็นเวลาหลายชั่วโมงโดยไม่มีการอัปเดตข้อมูลอ้างอิงจากภายนอก ความเสถียรของอคติจะกลายเป็นแหล่งที่มาของข้อผิดพลาดที่โดดเด่น และคุณต้องมีไจโรสโคประดับยุทธวิธีหรือระดับการนําทาง
ฉันสามารถใช้ไจโรสโคป 3 แกนแทนเซ็นเซอร์แกนเดียวสามตัวได้หรือไม่
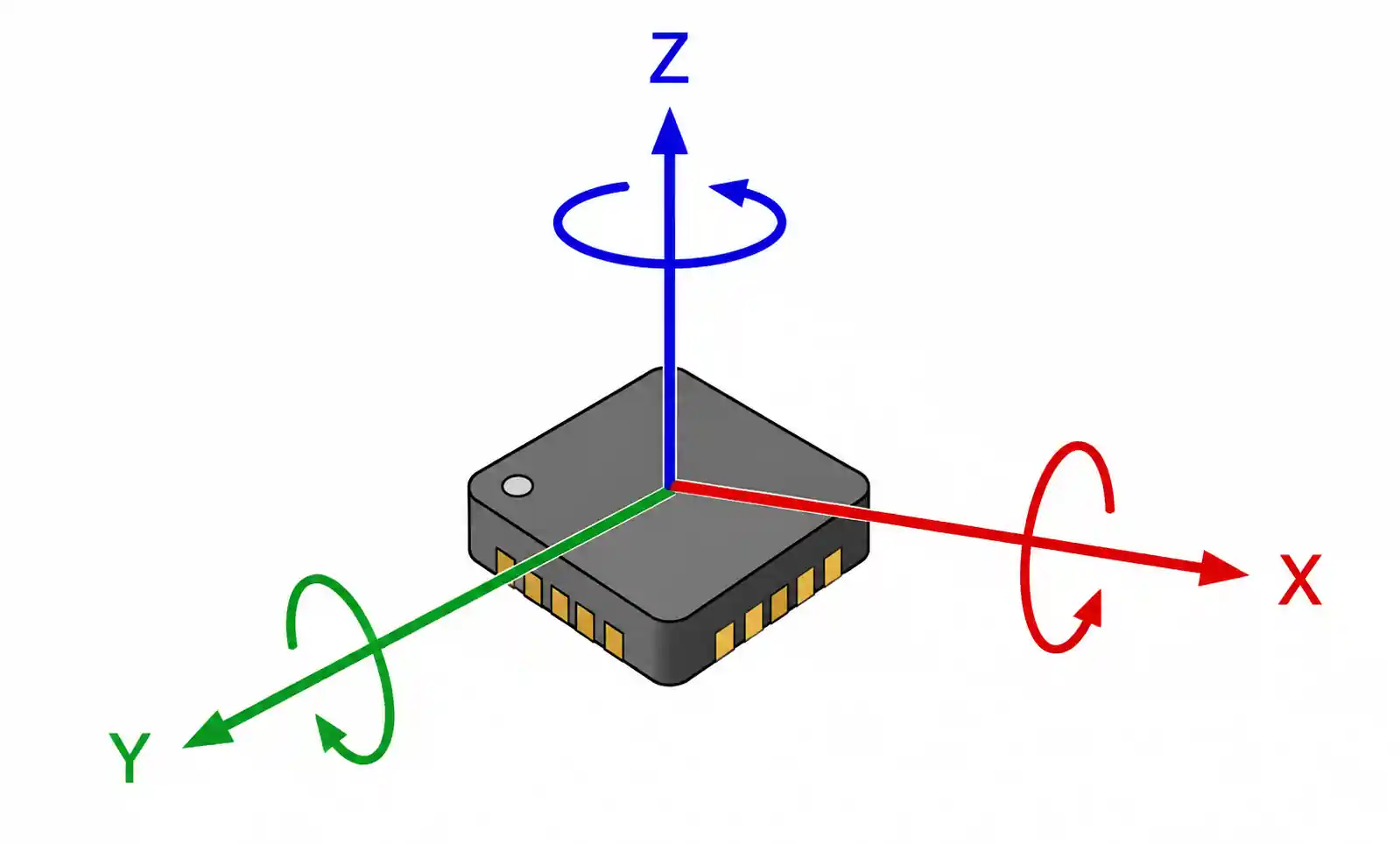
ใช่และนี่คือแนวทางมาตรฐานในการออกแบบที่ทันสมัย ไจโรสโคป MEMS แบบ 3 แกนรวมองค์ประกอบการตรวจจับสามองค์ประกอบไว้ในแพ็คเกจเดียว โดยวัดความเร็วเชิงมุมรอบแกน X, Y และ Z พร้อมกัน สิ่งนี้ให้ข้อได้เปรียบที่สําคัญ: รอยเท้า PCB ที่เล็กลง การใช้พลังงานที่ลดลง จํานวนส่วนประกอบที่ลดลง และการจัดตําแหน่งแกนที่ดีขึ้นเมื่อเทียบกับเซ็นเซอร์แบบแยกสามตัว ข้อควรพิจารณาหลักคือทั้งสามแกนใช้อินเทอร์เฟซพลังงานและการสื่อสารร่วมกัน ดังนั้นคุณจึงไม่สามารถกําหนดค่าแต่ละแกนได้อย่างอิสระหากแอปพลิเคชันของคุณต้องการช่วงหรือแบนด์วิดท์ต่อแกนที่แตกต่างกัน
ฉันจะจัดการกับการสอบเทียบออฟเซ็ตเริ่มต้นได้อย่างไร
ทําการสอบเทียบอัตราศูนย์เมื่อระบบหยุดนิ่ง ตามหลักการแล้วหลังจากที่ไจโรสโคปถึงสมดุลทางความร้อน (โดยทั่วไป 2-5 นาทีหลังจากเปิดเครื่อง) รวบรวม 50-100 ตัวอย่างที่อัตราข้อมูลการทํางานปกติของคุณ เฉลี่ยเพื่อลดสัญญาณรบกวน และจัดเก็บค่าเฉลี่ยนี้เป็นการแก้ไขออฟเซ็ต ลบออฟเซ็ตนี้ออกจากการอ่านที่ตามมาทั้งหมด ปรับเทียบใหม่เมื่อใดก็ตามที่ระบบเริ่มทํางานจากสถานะปิดเครื่องหรือหากอุณหภูมิในการทํางานเปลี่ยนแปลงอย่างมีนัยสําคัญ สําหรับอุปกรณ์สําหรับผู้บริโภค ให้ทริกเกอร์การปรับเทียบใหม่เมื่อระบบตรวจพบช่วงเวลาหยุดนิ่ง (เซ็นเซอร์ทั้งหมดแสดงการเปลี่ยนแปลงเพียงเล็กน้อยเป็นเวลาหลายวินาที) สําหรับการใช้งานในอุตสาหกรรม ให้ใช้ขั้นตอนการสอบเทียบอย่างเป็นทางการซึ่งเป็นส่วนหนึ่งของขั้นตอนการเริ่มต้นใช้งานหรือการบํารุงรักษา
ฉันควรใช้อัตราการสุ่มตัวอย่างเท่าใดสําหรับไจโรสโคปของฉัน
เลือก samp อัตราลิงสูงกว่าการเคลื่อนไหวความถี่สูงสุดอย่างน้อย 4-5 เท่าที่คุณต้องการวัด สําหรับการติดตามการเคลื่อนไหวของมนุษย์ 100-200 Hz ก็เพียงพอแล้ว สําหรับหุ่นยนต์ความเร็วสูงหรือการตรวจสอบการสั่นสะเทือน อาจจําเป็นต้องใช้ 1-4 kHz อัตราการสุ่มตัวอย่างที่สูงขึ้นช่วยให้สามารถกรองแบบดิจิทัลได้ดีขึ้นและลดสัญญาณรบกวนเชิงปริมาณ แต่เพิ่มการใช้พลังงานและข้อกําหนดในการประมวลผลข้อมูล ไจโรสโคปจํานวนมากมีอัตราข้อมูลเอาต์พุตที่กําหนดค่าได้—เริ่มต้นด้วยอัตราที่สูงขึ้นในระหว่างการพัฒนาเพื่อจับเนื้อหาความถี่สูงที่ไม่คาดคิด จากนั้นลดให้เหลืออัตราขั้นต่ําที่จําเป็นสําหรับการผลิตเพื่อเพิ่มประสิทธิภาพการใช้พลังงาน
ไจโรสโคปเกรดยานยนต์จําเป็นสําหรับการใช้งานยานยนต์ทั้งหมดหรือไม่
สําหรับระบบที่มีความสําคัญต่อความปลอดภัยหรือเกี่ยวข้องโดยตรงกับการควบคุมยานพาหนะ (ESC, ADAS, การปรับใช้ถุงลมนิรภัย) โดยทั่วไปแล้วผู้ผลิตยานยนต์จําเป็นต้องใช้เซ็นเซอร์ที่ผ่านการรับรอง AEC-Q100 และมักได้รับคําสั่งจากมาตรฐานความปลอดภัยในการทํางาน เช่น ISO 26262 สําหรับการใช้งานที่ไม่เกี่ยวข้องกับความปลอดภัย เช่น การควบคุมด้วยท่าทางของระบบสาระบันเทิงหรือระบบป้องกันภาพสั่นไหวของกล้องติดรถยนต์ เซ็นเซอร์ระดับอุตสาหกรรมอาจเพียงพอขึ้นอยู่กับความต้องการของลูกค้าของคุณ อย่างไรก็ตาม แม้แต่การใช้งานยานยนต์ที่ไม่สําคัญก็ต้องทนต่อการหมุนเวียนที่รุนแรง ความน่าเชื่อถือในระยะยาว และการสัมผัสกับสภาพแวดล้อมที่มีคลื่นแม่เหล็กไฟฟ้าของยานยนต์ การใช้ชิ้นส่วนที่ผ่านการรับรองสําหรับยานยนต์ช่วยลดความยุ่งยากในการรับรองและลดความเสี่ยงจากความล้มเหลวในภาคสนาม แม้ว่าจะไม่ได้จําเป็นอย่างเคร่งครัดก็ตาม
ฉันจะป้องกันไจโรสโคปจากการกระแทกทางกลระหว่างการขนส่งได้อย่างไร
โดยทั่วไปไจโรสโคป MEMS จะทนทานต่อแรงกระแทกทางกลเมื่อไม่มีพลังงาน ซึ่งโดยทั่วไปจะทนต่อ 10,000 กรัมหรือสูงกว่า อย่างไรก็ตาม การกระแทกระหว่างการทํางาน (เมื่อองค์ประกอบการตรวจจับเคลื่อนที่) ก่อให้เกิดความเสี่ยงมากขึ้น ออกแบบการติดตั้ง PCB ของคุณเพื่อแยกเซ็นเซอร์ออกจากการกระแทกและการตกหล่นของเคส ใช้การเคลือบที่สอดคล้องกันหรือฝาครอบป้องกันหากเซ็นเซอร์ถูกเปิดออก สําหรับผลิตภัณฑ์ที่จัดส่งพร้อมกับแบตเตอรี่ที่ติดตั้งไว้ (ไจโรสโคปที่อาจใช้พลังงาน) ให้แน่ใจว่ามีการกันกระแทกบรรจุภัณฑ์ที่เพียงพอ และทดสอบการออกแบบของคุณตามมาตรฐานบรรจุภัณฑ์ IETM หรือข้อกําหนดการทดสอบการตกหล่นที่เทียบเท่าที่เกี่ยวข้องกับหมวดหมู่ผลิตภัณฑ์ของคุณ
8. สรุป
การเลือกไจโรสโคปเป็นเรื่องของการแลกเปลี่ยน: ระยะ เสียงรบกวน ความเสถียรของอคติ และกําลัง ของผู้บริโภค? ใช้ราคาถูกและใช้พลังงานต่ํา อุตสาหกรรมหรือยานยนต์? คุณต้องการความเสถียรในระยะยาวและการทํางานที่อุณหภูมิกว้าง ปรับสมดุลให้ถูกต้องและคุณจะไม่ระบุมากเกินไป
สําหรับการหมุนหน้าจอ ท่าทาง หรือการติดตามกิจกรรม ไจโร MEMS สําหรับผู้บริโภคจาก Bosch หรือ ST ในช่วง ±500 ถึง ±2000 dps มักจะทํางาน สําหรับหุ่นยนต์ ระบบป้องกันภาพสั่นไหวของกล้อง หรือสิ่งใดก็ตามที่ต้องการความแม่นยําต่ํากว่าองศาเมื่อเวลาผ่านไป ให้มองหาความเสถียรของอคติที่ต่ํากว่า 10 °/h และความหนาแน่นของสัญญาณรบกวนต่ํากว่า 0.015 °/s/√Hz
บรรทัดล่าง: เริ่มต้นด้วยข้อกําหนดที่ชัดเจน—ช่วง ความแม่นยํา อุณหภูมิ กําลัง อายุการใช้งาน กรองผู้สมัคร จากนั้นทดสอบตัวเลือกอันดับต้น ๆ ในสภาพจริง วิธีการที่เป็นระบบนั้นทําให้คุณมีไจโรที่ทํางาน ทํางานในการผลิต และคงการสนับสนุนตลอดอายุการใช้งานของผลิตภัณฑ์ของคุณ