

คู่มือการเลือกเทคโนโลยี MEMS: การเลือกระบบไมโครไฟฟ้าและเครื่องกลที่เหมาะสมสําหรับการใช้งานของคุณ
กลุ่มเป้าหมาย: วิศวกรอิเล็กทรอนิกส์ หัวหน้าทีม R&D นักออกแบบผลิตภัณฑ์ ผู้จัดการฝ่ายจัดซื้อ และผู้มีอํานาจตัดสินใจด้านเทคนิคที่ทํางานกับการรวมเซ็นเซอร์ อุปกรณ์ IoT ระบบยานยนต์ และอุปกรณ์อิเล็กทรอนิกส์สําหรับผู้บริโภค
สารบัญ
- [บทนํา: ทําความเข้าใจ MEMS ในเทคโนโลยีเซมิคอนดักเตอร์สมัยใหม่] (#1-introduction-understanding-mems-in-modern-semiconductor-technology)
- [พารามิเตอร์ทางเทคนิคที่สําคัญของอุปกรณ์ MEMS] (#2-key-technical-parameters-of-mems-devices)
- [ประเภท MEMS และการเลือกเฉพาะแอปพลิเคชัน] (# 3-mems-types-and-application-specific-selection)
- [การเปรียบเทียบประสิทธิภาพ: MEMS กับเซ็นเซอร์แบบดั้งเดิม] (#4-การเปรียบเทียบประสิทธิภาพ-mems-vs-เซ็นเซอร์แบบดั้งเดิม)
- [ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไปในการใช้งาน] (#5-ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดการใช้งานทั่วไป)
- [ข้อควรพิจารณาเกี่ยวกับห่วงโซ่อุปทานและการจัดหา] (#6-ข้อควรพิจารณาเกี่ยวกับห่วงโซ่อุปทานและการจัดหา)
- คําถามที่พบบ่อย
- บทสรุปและขั้นตอนต่อไป
1. บทนํา: ทําความเข้าใจ MEMS ในเทคโนโลยีเซมิคอนดักเตอร์สมัยใหม่
ระบบไมโครไฟฟ้าเครื่องกล (MEMS) เป็นจุดตัดที่สําคัญของวิศวกรรมเครื่องกลและเทคโนโลยีเซมิคอนดักเตอร์ โดยรวมโครงสร้างทางกลด้วยกล้องจุลทรรศน์เข้ากับวงจรอิเล็กทรอนิกส์บนพื้นผิวซิลิกอนเดียว อุปกรณ์ MEMS ใช้ประโยชน์จากกระบวนการผลิตเซมิคอนดักเตอร์ ซึ่งแตกต่างจากเซ็นเซอร์แบบแยกทั่วไป รวมถึงไมโครแมชชีนนิ่งพื้นผิว ไมโครแมชชีนนิ่งจํานวนมาก และการยึดติดเวเฟอร์ เพื่อสร้างเซ็นเซอร์และแอคทูเอเตอร์ขนาดเล็กที่มีอัตราส่วนประสิทธิภาพต่อขนาดที่ไม่เคยมีมาก่อน
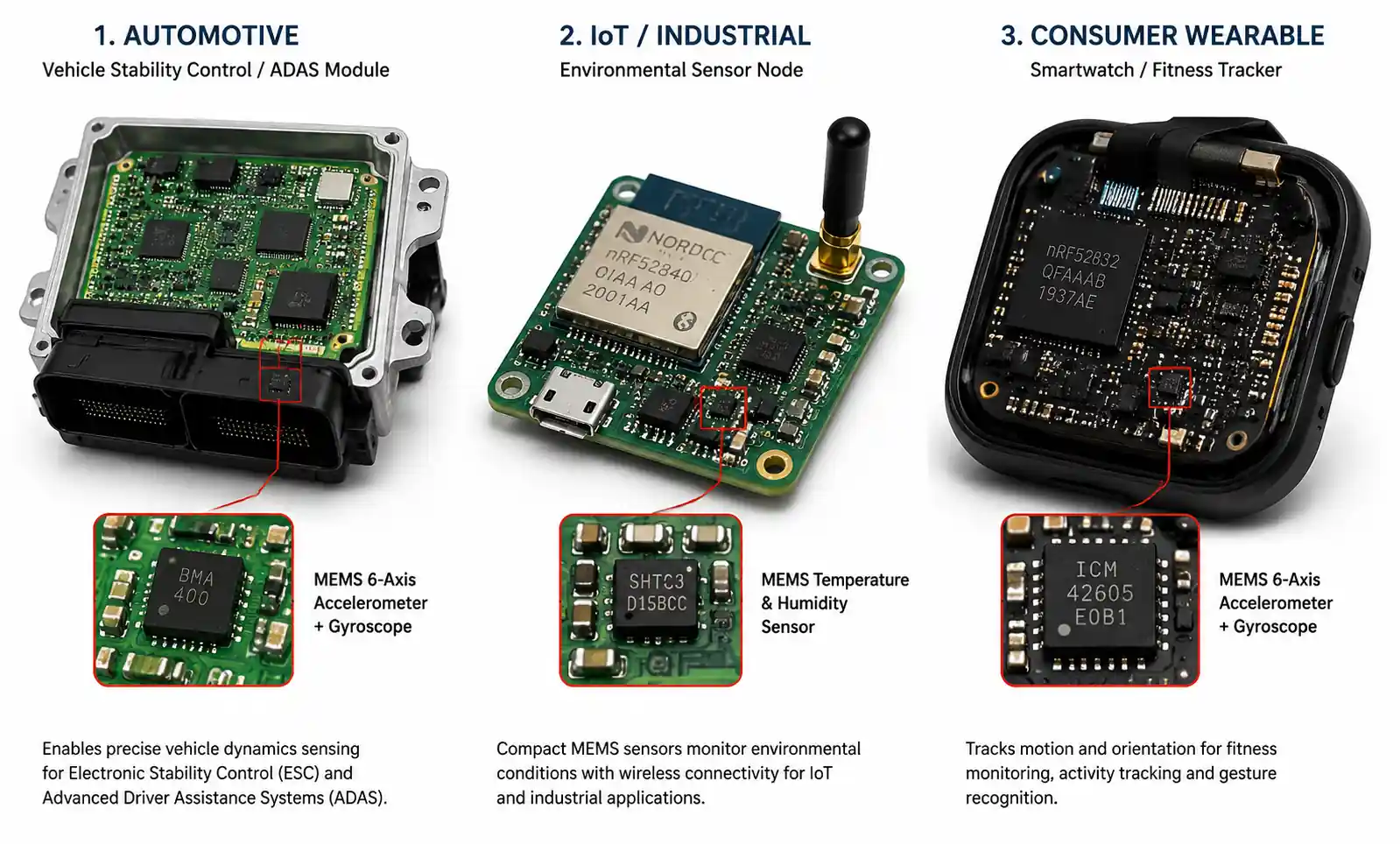
ตลาด MEMS ทั่วโลกเติบโตขึ้นอย่างมากในด้านยานยนต์ อุตสาหกรรม เครื่องใช้ไฟฟ้า และการใช้งานทางการแพทย์ วิศวกรต้องเผชิญกับแรงกดดันที่เพิ่มขึ้นในการเลือกส่วนประกอบ MEMS ที่สร้างสมดุลระหว่างความไว การใช้พลังงาน ขนาดบรรจุภัณฑ์ และต้นทุน ในขณะที่ปฏิบัติตามข้อกําหนดด้านความน่าเชื่อถือที่เข้มงวด คู่มือนี้ให้เกณฑ์การคัดเลือกที่ใช้งานได้จริงตามข้อจํากัดในการออกแบบในโลกแห่งความเป็นจริง และช่วยให้คุณหลีกเลี่ยงการตีความข้อมูลจําเพาะที่ผิดพลาดทั่วไปซึ่งอาจนําไปสู่การออกแบบใหม่ที่มีค่าใช้จ่ายสูง
ไม่ว่าคุณจะออกแบบโหนดเซ็นเซอร์ IoT ที่ต้องการการใช้พลังงานต่ําเป็นพิเศษ ระบบความปลอดภัยของยานยนต์ที่ต้องการคุณสมบัติ AEC-Q หรืออุปกรณ์สวมใส่สําหรับผู้บริโภคที่ให้ความสําคัญกับบรรจุภัณฑ์ขนาดกะทัดรัด
2. พารามิเตอร์ทางเทคนิคที่สําคัญของอุปกรณ์ MEMS
เมื่อประเมินส่วนประกอบ MEMS สําหรับการออกแบบของคุณพารามิเตอร์ทางเทคนิคหลายอย่างจะส่งผลโดยตรงต่อประสิทธิภาพของระบบ การทําความเข้าใจข้อกําหนดเหล่านี้และผลกระทบทางวิศวกรรมเป็นสิ่งสําคัญสําหรับการเลือกที่เหมาะสม
2.1 ความไวและช่วงการวัด
ความไวของ MEMS กําหนดการเปลี่ยนแปลงสัญญาณเอาต์พุตต่อหน่วยของปริมาณทางกายภาพที่วัดได้ สําหรับมาตรความเร่งโดยทั่วไปจะแสดงเป็น mV/g หรือ LSB/g สําหรับเอาต์พุตดิจิตอล ความไวที่สูงขึ้นช่วยเพิ่มอัตราส่วนสัญญาณต่อสัญญาณรบกวน แต่มักจะลดช่วงการวัด ข้อผิดพลาดในการออกแบบที่พบบ่อยคือการเลือกความไวสูงสุดโดยไม่คํานึงถึงช่วงการเร่งความเร็วที่คาดไว้ในการใช้งานของคุณ ซึ่งอาจนําไปสู่ความอิ่มตัวของเซ็นเซอร์ระหว่างการทํางานปกติ
สําหรับเซ็นเซอร์ความดัน ความไวจะแสดงเป็น mV/kPa หรือ mV/V/kPa โดยมีช่วงเอาต์พุตเต็มสเกลโดยทั่วไปตั้งแต่ 10 mV ถึง 100 mV สําหรับเซ็นเซอร์แบบอะนาล็อก เมื่อเลือก MEMS แรงดันสําหรับการใช้งานทางการแพทย์หรืออุตสาหกรรม ให้ตรวจสอบว่าข้อมูลจําเพาะของความไวตรงกับข้อกําหนดความละเอียด ADC ของคุณและคํานึงถึงการเบี่ยงเบนที่เกิดจากอุณหภูมิ
2.2 การใช้พลังงานและโหมดการทํางาน
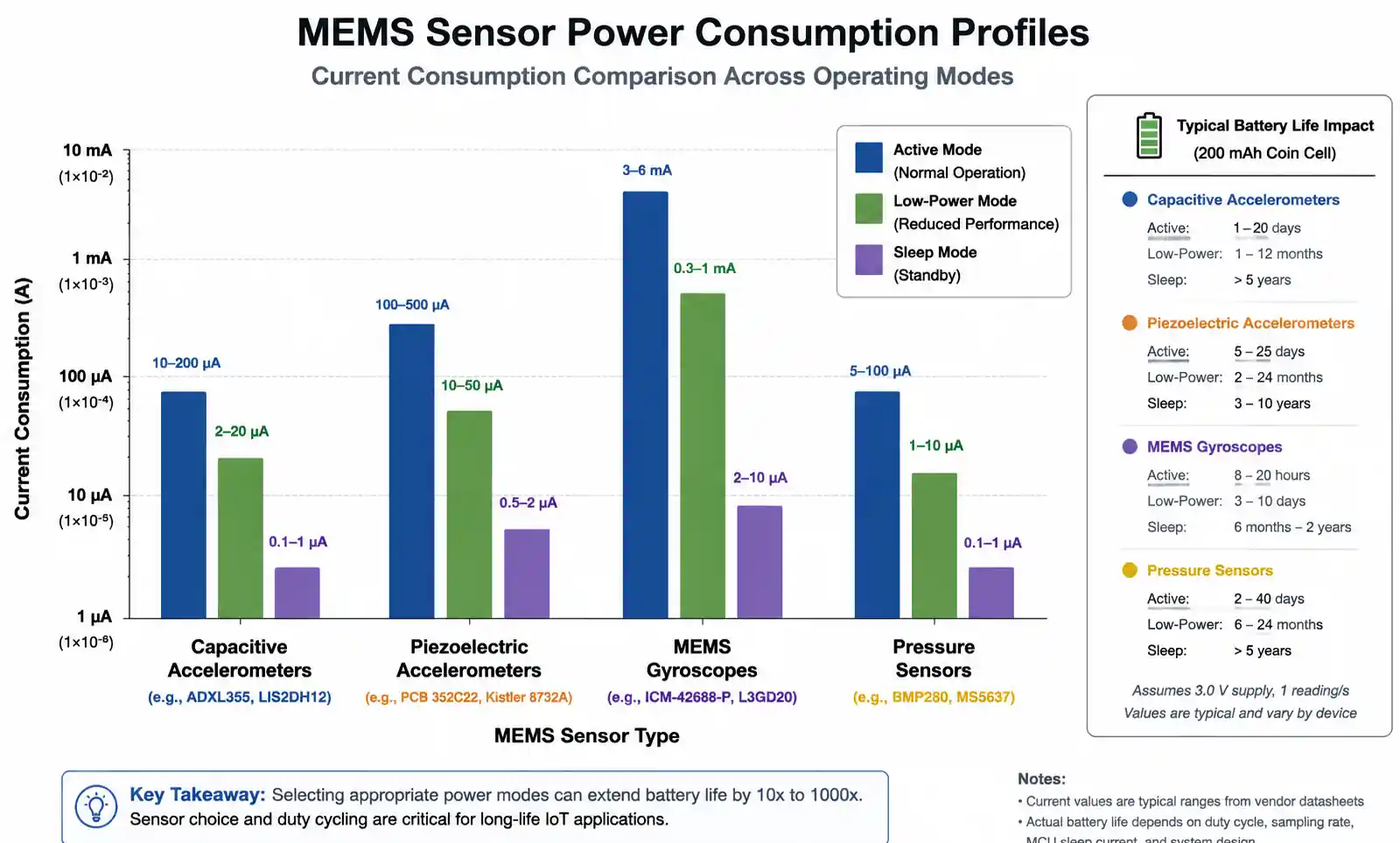
การใช้พลังงาน MEMS แตกต่างกันอย่างมากตามสถาปัตยกรรมอุปกรณ์และโหมดการทํางาน โดยทั่วไปแล้วมาตรความเร่ง MEMS แบบ Capacitive จะใช้ 10–200 μA ในโหมดต่อเนื่อง ในขณะที่การออกแบบเพียโซอิเล็กทริกอาจต้องใช้ 100–500 μA สําหรับแอปพลิเคชัน IoT ที่ใช้พลังงานจากแบตเตอรี่ ให้ใส่ใจกับกระแสไฟในโหมดสลีป (มักจะเป็น 1–5 μA) และเวลาปลุก เนื่องจากการทํางานแบบหมุนเวียนจะส่งผลกระทบอย่างมากต่อพลังงานของระบบทั้งหมด
โดยทั่วไปไจโรสโคปจะใช้พลังงานมากกว่ามาตรความเร่งเนื่องจากต้องการการสั่นเชิงกลอย่างต่อเนื่อง ไจโรสโคป MEMS ทั่วไปดึง 3-6 mA ระหว่างการวัดแบบแอคทีฟ ทําให้สถาปัตยกรรมการจัดการพลังงานมีความสําคัญในอุปกรณ์พกพา พิจารณา MEMS ที่มีการจัดการพลังงานในตัวหรือโหมดพลังงานต่ําที่สามารถซิงโครไนซ์กับรอบการนอนหลับ MCU ของคุณได้
2.3 ความหนาแน่นและความละเอียดของเสียงรบกวน
ความหนาแน่นของสัญญาณรบกวนที่วัดเป็น μg/√Hz สําหรับมาตรความเร่งหรือ °/s/√Hz สําหรับไจโรสโคป จะกําหนดสัญญาณต่ําสุดที่ตรวจจับได้ ความหนาแน่นของสัญญาณรบกวนที่ต่ําลงช่วยให้สามารถวัดความละเอียดได้สูงขึ้น แต่อาจต้องแลกกับการใช้พลังงานที่เพิ่มขึ้นหรือขนาดแม่พิมพ์ที่ใหญ่ขึ้น สําหรับการใช้งานที่มีความแม่นยําสูง เช่น การนําทางเฉื่อยหรือการตรวจสอบแผ่นดินไหว โดยทั่วไปจะต้องมีความหนาแน่นของเสียงรบกวนต่ํากว่า 25 μg/√Hz
ความสัมพันธ์ระหว่างความหนาแน่นของสัญญาณรบกวนและแบนด์วิดท์เป็นสิ่งสําคัญ การจํากัดแบนด์วิดท์การวัดของคุณให้แคบลงผ่านการกรองแบบดิจิทัลสามารถปรับปรุงความละเอียดที่มีประสิทธิภาพได้ อย่างไรก็ตาม ตรวจสอบให้แน่ใจว่าการออกแบบตัวกรองของคุณไม่ทําให้เกิดความล่าช้าของเฟสมากเกินไปหากการตอบสนองแบบเรียลไทม์มีความสําคัญต่อลูปควบคุมหรือฟังก์ชันความปลอดภัยของคุณ
3. ประเภท MEMS และการเลือกเฉพาะแอปพลิเคชัน
เทคโนโลยีการตรวจจับ MEMS ที่แตกต่างกันมีข้อได้เปรียบที่แตกต่างกันขึ้นอยู่กับความต้องการในการใช้งานของคุณ ส่วนนี้ให้คําแนะนําในการเลือกตามสถานการณ์การออกแบบทั่วไป
3.1 มาตรความเร่ง MEMS
| พารามิเตอร์ | MEMS แบบ Capacitive | เพียโซอิเล็กทริก MEMS | MEMS แบบเพียโซรีซิสทีฟ |
|---|---|---|---|
| ช่วงการวัด | ±2g ถึง ±16g (ผู้บริโภค) ±50g ถึง ±200g (ยานยนต์) |
±50g ถึง ±500g | ±2g ถึง ±250g |
| การตอบสนองความถี่ | DC ถึง 1 kHz | 1 Hz ถึง 10 kHz+ | DC ถึง 5 kHz |
| การใช้พลังงาน | 10–200 μA | 10–200 ไมโครแอมป์ 100–500 μA | 100–500 μA |
| ความเสถียรของอุณหภูมิ | ยอดเยี่ยม | ดี (ต้องชดเชย) | ปานกลาง (ดริฟท์สูง) |
| แอพพลิเคชั่นที่ดีที่สุด | การตรวจจับการเอียง, การตรวจจับการเคลื่อนไหว, อุปกรณ์สําหรับผู้บริโภค การตรวจสอบการสั่นสะเทือน, การตรวจจับแรงกระแทก, เซ็นเซอร์การชน สภาพแวดล้อมที่สมบุกสมบัน การใช้งาน g สูง | Uka AG | |
| ช่วงต้นทุนทั่วไป | $0.50–$3.00 | $2.00–$8.00 | $3.00–$12.00 |
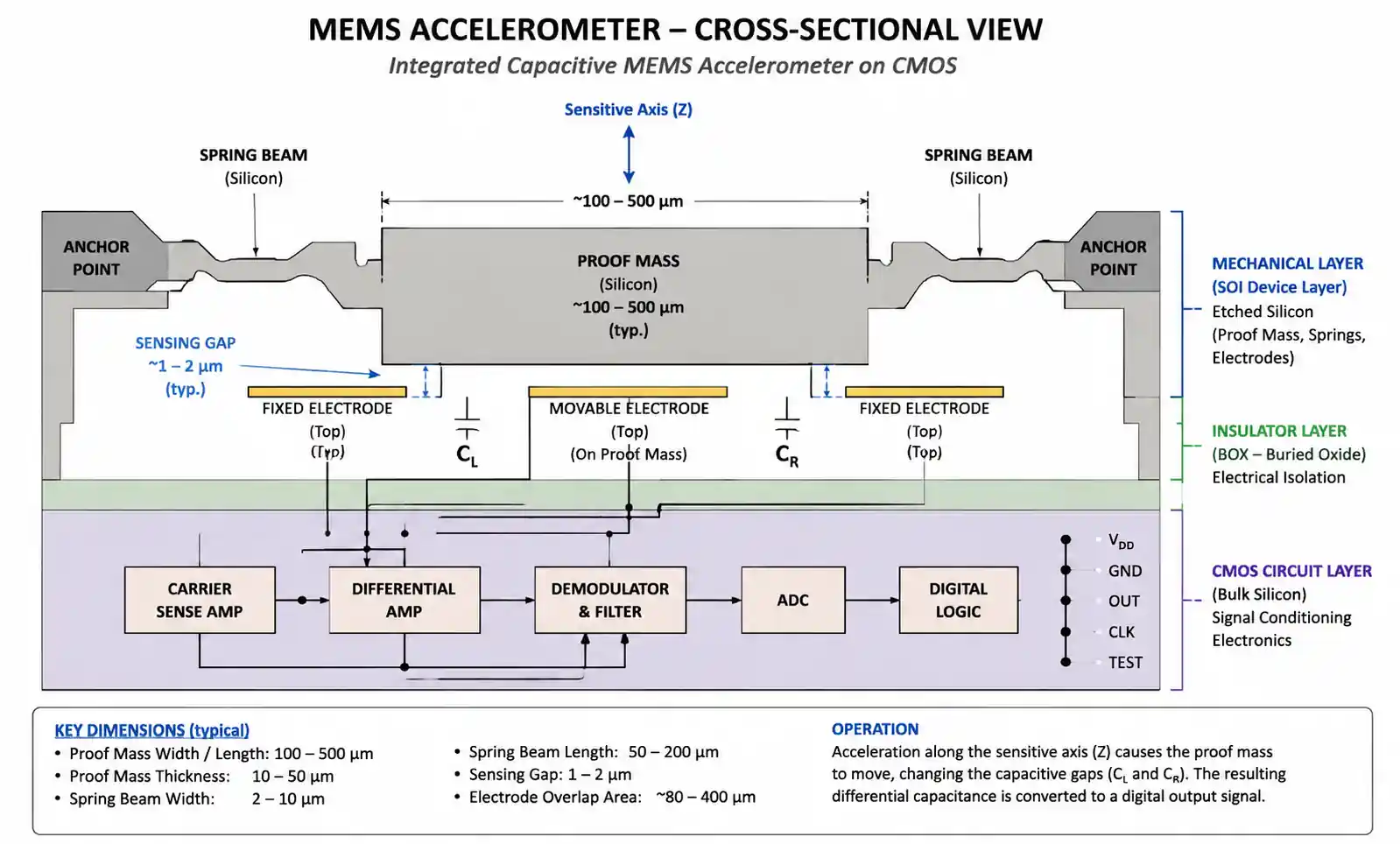
มาตรความเร่ง MEMS แบบ Capacitive ครองแอปพลิเคชันสําหรับผู้บริโภคและมือถือ เนื่องจากการตอบสนอง DC ที่ยอดเยี่ยม การใช้พลังงานต่ํา และความคุ้มค่า พวกเขาวัดความเร่งโดยการตรวจจับการเปลี่ยนแปลงความจุในมวลพิสูจน์ด้วยเครื่องจักรขนาดเล็กที่แขวนลอยโดยโครงสร้างสปริง สําหรับการตรวจจับการวางแนวของสมาร์ทโฟนหรือการติดตามการออกกําลังกาย มาตรความเร่งแบบ capacitive ที่มีช่วง ±2g ถึง ±8g และความละเอียด 12-16 บิตมักจะเหมาะสมที่สุด
MEMS แบบเพียโซอิเล็กทริกเป็นเลิศในการใช้งานการตรวจสอบการสั่นสะเทือนความถี่สูง เช่น การบํารุงรักษาเชิงคาดการณ์ในอุปกรณ์อุตสาหกรรมหรือการตรวจจับการกระแทกของยานยนต์ การไม่สามารถวัดสัญญาณ DC ได้ (โดยธรรมชาติแล้วเป็นสัญญาณ AC ควบคู่กัน) ทําให้ไม่เหมาะสําหรับการตรวจจับการเอียง แต่เหมาะสําหรับการวิเคราะห์การสั่นสะเทือนแบบไดนามิกที่มีความถี่สูงกว่า 1 Hz เป็นที่สนใจ
3.2 MEMS ไจโรสโคป
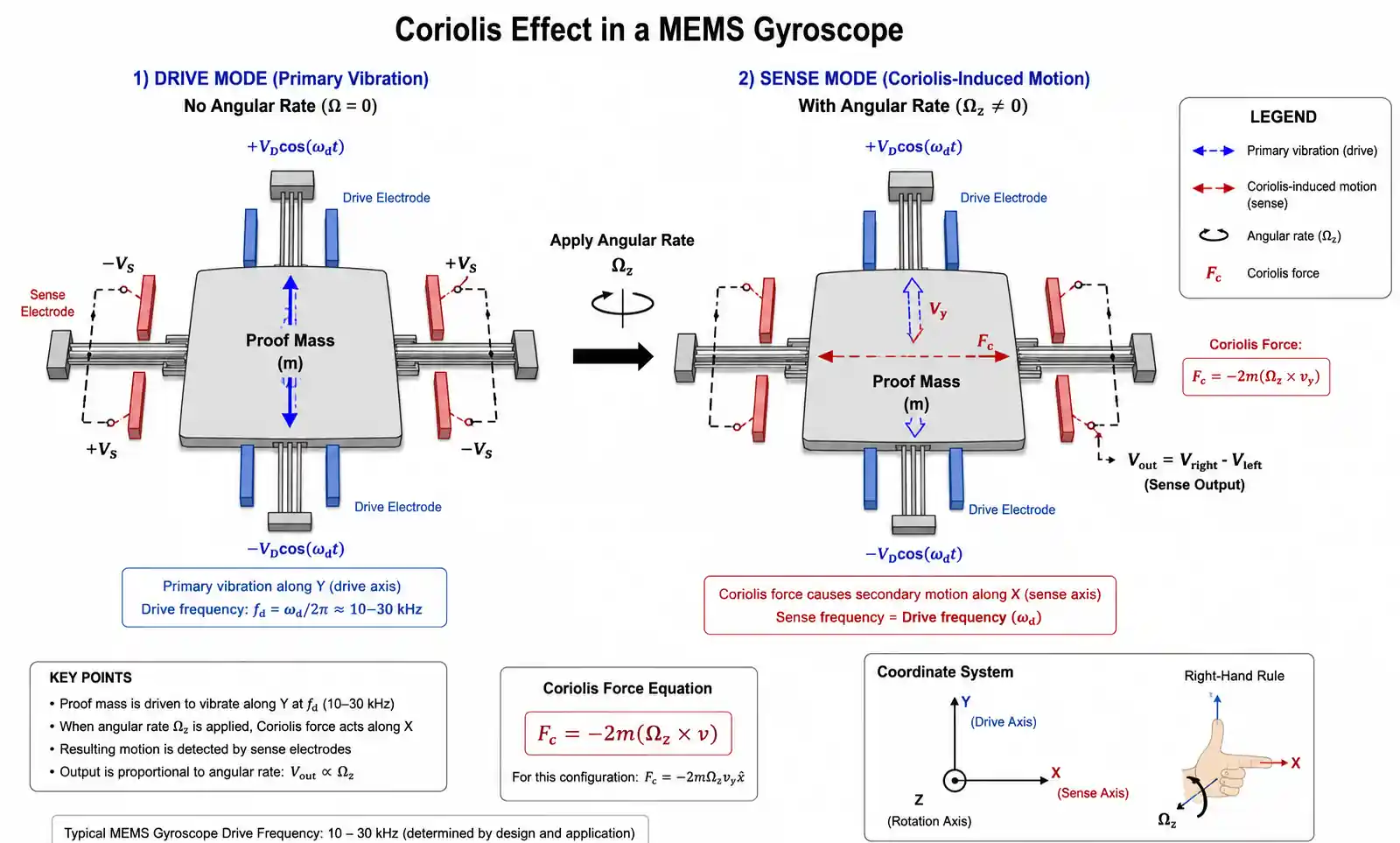
ไจโรสโคป MEMS วัดความเร็วเชิงมุมโดยใช้เอฟเฟกต์โคริโอลิสต่อโครงสร้างจุลภาคที่สั่นสะเทือน การเลือกขึ้นอยู่กับความแม่นยํา ข้อมูลจําเพาะการดริฟท์ และงบประมาณพลังงานที่คุณต้องการเป็นหลัก
| ประเภทการสมัคร | ข้อกําหนดช่วง | ต้องการความเสถียรของอคติ | สถาปัตยกรรมที่แนะนํา |
|---|---|---|---|
| เครื่องใช้ไฟฟ้า (เกม, AR/VR) | ±250 ถึง ±2000°/s | มิซูมิ 10–50°/ชม. เกรดผู้บริโภคแบบแกนเดียวหรือ 3 แกน | มิซูมิ |
| ระบบป้องกันภาพสั่นไหวของโดรน ±500 ถึง ±2000°/s | มิซูมิ 5–20°/ชม. 3 แกนเกรดยานยนต์พร้อมการตอบสนองที่รวดเร็ว | ||
| ยานยนต์ (ESC, ADAS) | ±300°/วินาที | <10°/h, ผ่านการรับรองมาตรฐาน AEC-Q100 | เกรดยานยนต์พร้อมการทดสอบตัวเอง |
| หุ่นยนต์อุตสาหกรรม | Uka AG ±100 ถึง ±500°/s | มิซูมิ 1–5°/ชม. | เกรดยุทธวิธีประสิทธิภาพสูง |
| การนําทางเฉื่อย | ±100°/วินาที | 100°/s | <0.1°/ชม. |
ความเสถียรของอคติ (เรียกอีกอย่างว่าความเสถียรของอคติในรัน) มักถูกเข้าใจผิด แต่มีความสําคัญอย่างยิ่งสําหรับแอปพลิเคชันใดๆ ที่ต้องการการประมาณมุมผ่านการผสานรวม ไจโรสโคปที่มีความเสถียรของอคติ 10°/h จะสะสมข้อผิดพลาด 10 องศาต่อชั่วโมงแม้ว่าจะอยู่กับที่ก็ตาม การเบี่ยงเบนนี้จะต้องได้รับการชดเชยผ่านการหลอมรวมเซ็นเซอร์ด้วยมาตรความเร่งหรือเครื่องวัดสนามแม่เหล็ก
3.3 เซ็นเซอร์ความดัน MEMS
เซ็นเซอร์ความดัน MEMS ใช้องค์ประกอบการตรวจจับแบบ piezoresistive หรือ capacitive บนไดอะแฟรมซิลิกอน ปัจจัยการเลือกที่สําคัญ ได้แก่ ช่วงความดัน ความเข้ากันได้ของสื่อ และประเภทบรรจุภัณฑ์ (สัมบูรณ์ เกจวัด หรือความดันแตกต่าง)
สําหรับเซ็นเซอร์ความดันสัมบูรณ์ท่อร่วมยานยนต์ (MAP) ข้อมูลจําเพาะทั่วไปคือช่วงการวัด 20–250 kPa ที่มีความแม่นยํา ±1% ที่มากกว่า -40°C ถึง 125°C การตรวจวัดความดันโลหิตทางการแพทย์ต้องการความแม่นยําที่สูงขึ้น (±0.5%) และการรับรองความเข้ากันได้ทางชีวภาพ การควบคุมกระบวนการทางอุตสาหกรรมมักต้องการการแยกสื่อสแตนเลสและเอาต์พุตลูปกระแส 4-20 mA
เมื่อเลือกเซ็นเซอร์ความดัน MEMS ให้ตรวจสอบว่าความแม่นยําที่ระบุรวมถึงผลกระทบของอุณหภูมิตลอดช่วงการทํางานของคุณ โดยเอกสารข้อมูลจํานวนมากแสดงรายการความแม่นยําของอุณหภูมิห้องแยกต่างหากจากค่าสัมประสิทธิ์อุณหภูมิออฟเซ็ต (TCO) และค่าสัมประสิทธิ์ความไวของอุณหภูมิ (TCS) ซึ่งต้องรวมกันเพื่อการวิเคราะห์งบประมาณข้อผิดพลาดทั้งหมด
4. การเปรียบเทียบประสิทธิภาพ: MEMS กับเซ็นเซอร์แบบดั้งเดิม
การทําความเข้าใจว่าเมื่อใดที่เทคโนโลยี MEMS ให้ข้อได้เปรียบที่ชัดเจนเหนือวิธีการตรวจจับแบบเดิมจะช่วยเพิ่มประสิทธิภาพทั้งประสิทธิภาพและต้นทุน
| ประเภทเซนเซอร์ | ข้อได้เปรียบของ MEMS | ข้อได้เปรียบของเซ็นเซอร์แบบดั้งเดิม | ครอสโอเวอร์พอยต์ |
|---|---|---|---|
| มาตรความเร่ง | ขนาด กําลัง ต้นทุน การผสานรวม | Synology Inc. ความสามารถ G สูง (>500g), ความถี่ต่ํามาก (<0.01 Hz) | MISUMI ประเทศไทย การวัดค่าสูงกว่า ±200g หรือ DC |
| ไจโรสโคป | ขนาด ต้นทุน การเริ่มต้นที่รวดเร็ว ความแม่นยําสูงเป็นพิเศษ (เกรดการนําทาง) การดริฟท์ต่ํามาก | ความเสถียรของอคติ <ต้องใช้ 0.1°/h | |
| ไมโครโฟน | การตอบสนองความถี่แบน, พลังงานต่ํา, บรรจุภัณฑ์ SMD | ระดับความดันเสียงสูง (>130 dB SPL) | การบันทึกเสียงระดับมืออาชีพ |
| ออสซิลเลเตอร์ | ทนต่อแรงกระแทก พลังงานต่ํา ความสามารถในการตั้งโปรแกรม | มิซูมิ สัญญาณรบกวนเฟสต่ําเป็นพิเศษ เสถียรภาพของอุณหภูมิสูงสุด | แอพพลิเคชั่นโทรคมนาคม/RF ที่ต้องการสัญญาณรบกวนเฟส -140 dBc/Hz |
อุปกรณ์ MEMS สามารถลดขนาดลงได้อย่างมากผ่านการผลิตเซมิคอนดักเตอร์เป็นชุด โดยมาตรความเร่ง MEMS ใช้พื้นที่น้อยกว่า 4 มม.² เมื่อเทียบกับ 100+ มม.² สําหรับมาตรความเร่งแบบเพียโซอิเล็กทริกทั่วไป ข้อได้เปรียบในการผสานรวมนี้ช่วยให้แอปพลิเคชันต่างๆ เช่น หูฟังไร้สายอย่างแท้จริง ซึ่งข้อจํากัดด้านพื้นที่ทําให้เซ็นเซอร์แบบเดิมไม่สามารถทําได้
อย่างไรก็ตาม โดยทั่วไปแล้วเซ็นเซอร์ MEMS จะไม่สามารถเทียบได้กับประสิทธิภาพสูงสุดของเซ็นเซอร์แบบแยกขนาดใหญ่ในสภาวะที่รุนแรง การตรวจจับแผ่นดินไหวระดับไฮเอนด์ยังคงอาศัยมาตรความเร่งที่สมดุลของแรง และไจโรสโคปไฟเบอร์ออปติกยังคงเหนือกว่าสําหรับการใช้งานการนําทางที่ต้องการความเสถียร <0.01°/h ประเด็นการตัดสินใจขึ้นอยู่กับว่าข้อกําหนดด้านประสิทธิภาพของแอปพลิเคชันของคุณอยู่ในความสามารถของ MEMS หรือไม่ ซึ่งได้รับการปรับปรุงอย่างต่อเนื่องในขณะที่ต้นทุนลดลง
5. ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไปในการใช้งาน
การรวม MEMS ที่ประสบความสําเร็จต้องให้ความสนใจกับเค้าโครง PCB การออกแบบแหล่งจ่ายไฟ และความเข้าใจที่ถูกต้องเกี่ยวกับระบบพิกัดเซ็นเซอร์และอินเทอร์เฟซเอาต์พุต
5.1 เค้าโครง PCB และการติดตั้งทางกล
เซ็นเซอร์ MEMS มีโครงสร้างทางกลด้วยกล้องจุลทรรศน์ที่อาจได้รับผลกระทบจากความเครียดของ PCB และการมีเพศสัมพันธ์กับการสั่นสะเทือน ติดตั้งมาตรความเร่งและไจโรสโคป MEMS ให้ห่างจากขอบบอร์ดและรูยึด โดยควรอยู่ใกล้กับแกนกลางเชิงกลของบอร์ด หลีกเลี่ยงการวางไว้ใกล้ส่วนประกอบขนาดใหญ่ที่อาจสร้างการไล่ระดับความร้อน
เพื่อความแม่นยําสูงสุด ให้ลดระยะห่างระหว่างอุปกรณ์ MEMS และจุดอ้างอิงการติดตั้ง ในการใช้งานที่วัดการเคลื่อนที่แบบหมุน ออฟเซ็ตแต่ละมิลลิเมตรจะทําให้เกิดความเร่งสัมผัสที่ปนเปื้อนการวัดไจโรสโคปของคุณ จัดทําเอกสารตําแหน่งเซ็นเซอร์ที่แน่นอนสําหรับวิศวกรเครื่องกลของคุณเพื่อคํานวณการแปลงพิกัดอย่างเหมาะสม
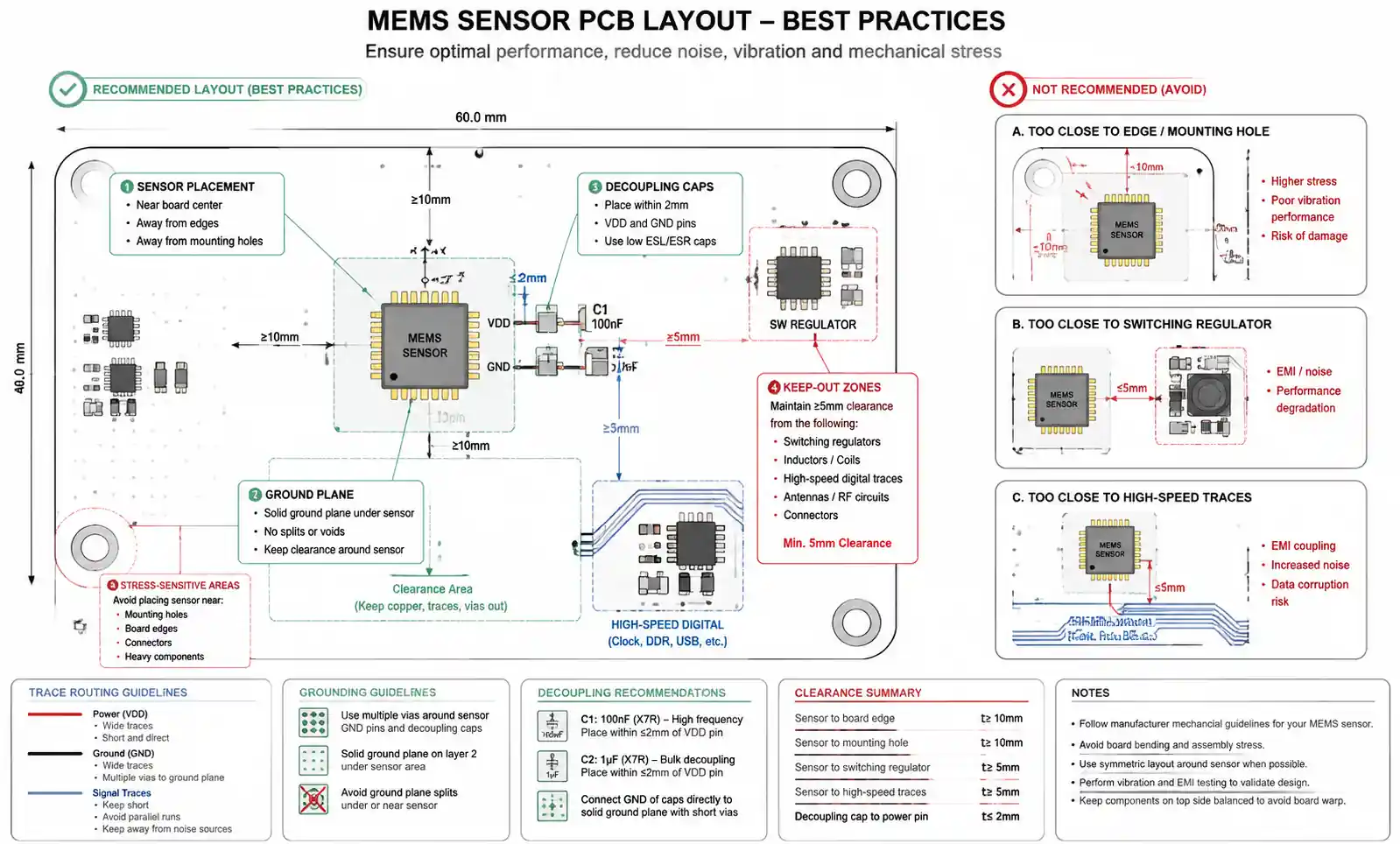
ข้อผิดพลาดที่สําคัญคือการกําหนดเส้นทางสัญญาณดิจิตอลความเร็วสูงหรือสวิตชิ่งพาวเวอร์ซัพพลายใกล้กับเอาต์พุตอะนาล็อก MEMS แม้จะมีส่วนต่อประสานที่แตกต่าง แต่การรบกวนทางแม่เหล็กไฟฟ้าก็สามารถจับคู่กับโครงสร้างมวลที่พิสูจน์ได้ละเอียดอ่อน ใช้ระนาบกราวด์และรักษาระยะห่างจากแหล่งกําเนิดเสียงอย่างน้อย 5 มม. สําหรับอินเทอร์เฟซดิจิทัล SPI หรือ I²C การสิ้นสุดที่เหมาะสมและตัวเก็บประจุบายพาสตามข้อมูลจําเพาะของแผ่นข้อมูลเป็นสิ่งสําคัญในการป้องกันข้อผิดพลาดในการสื่อสาร
5.2 การกรองและแยกพาวเวอร์ซัพพลาย
อุปกรณ์ MEMS ต้องการแหล่งจ่ายไฟที่สะอาดและเสถียร ซึ่งโดยทั่วไปจะเป็น 1.8V ถึง 3.3V พร้อมระลอกคลื่น <50 mV วางตัวเก็บประจุแบบแยกส่วนให้ใกล้กับพิน VDDIO และ VDD มากที่สุด โดยใช้เซรามิก 100 nF (X7R หรือ X5R) และตัวเก็บประจุจํานวนมาก 10 μF ร่วมกัน ตัวเก็บประจุเซรามิกควรอยู่ห่างจากพินจ่ายไฟไม่เกิน 2 มม. เพื่อลดสัญญาณรบกวนความถี่สูงได้อย่างมีประสิทธิภาพ
มาตรความเร่งและไจโรสโคป MEMS บางรุ่นมีตัวควบคุมแรงดันไฟฟ้าภายใน แต่สัญญาณรบกวนจากแหล่งจ่ายไฟภายนอกยังคงสามารถจับคู่ผ่านเอฟเฟกต์พื้นผิวได้ สําหรับการใช้งานที่มีความแม่นยํา ให้พิจารณาใช้ตัวควบคุมการดรอปเอาต์ต่ํา (LDO) เฉพาะที่มีสัญญาณรบกวนเอาต์พุต <40 μVrms แทนที่จะใช้แหล่งจ่ายไฟหลักของระบบร่วมกัน สิ่งนี้จะมีความสําคัญเมื่อ MEMS ใช้บอร์ดร่วมกับเครื่องส่งสัญญาณ RF, ตัวแปลง DC-DC หรือไดรเวอร์มอเตอร์
5.3 การสอบเทียบและฟิวชั่นเซนเซอร์
โดยทั่วไปเซ็นเซอร์ MEMS แบบสําเร็จรูปจะมีค่าความคลาดเคลื่อนความไว ±3% และข้อผิดพลาดออฟเซ็ต ±50 มก. (สําหรับมาตรความเร่ง) หรือ ±3°/s (สําหรับไจโรสโคป) สําหรับการใช้งานที่ต้องการความแม่นยําที่ดีขึ้นให้ใช้การสอบเทียบจากโรงงานหรือภาคสนาม การสอบเทียบแบบหลายจุดในอุณหภูมิช่วยเพิ่มความแม่นยําเป็น ±1% หรือดีกว่า
การรวมการดริฟท์ของไจโรสโคปจะสะสมข้อผิดพลาดของมุมอย่างรวดเร็วโดยไม่ต้องแก้ไข ฟิลเตอร์เสริมหรือฟิลเตอร์ Kalman ที่หลอมรวมการอ้างอิงแรงโน้มถ่วงของมาตรความเร่งเข้ากับการวัดไจโรสโคปเป็นสิ่งจําเป็นสําหรับการติดตามการวางแนว โปรดทราบว่าการวัดมาตรความเร่งมีทั้งแรงโน้มถ่วงและความเร่งเชิงเส้นอัลกอริทึมฟิวชั่นของคุณต้องแยกความแตกต่างระหว่างการเอียงและการเคลื่อนที่เชิงเส้นที่แท้จริง
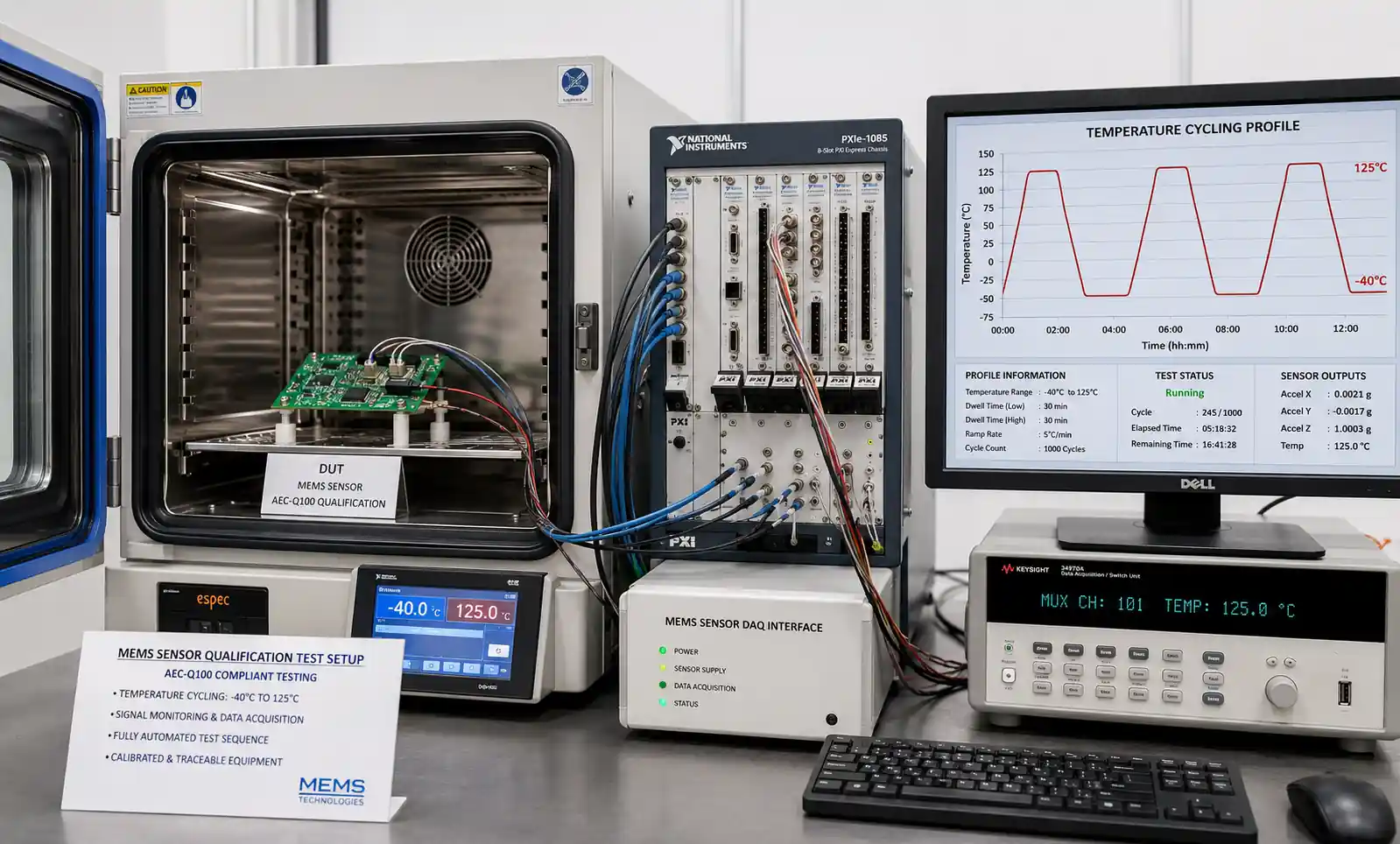
5.4 การทดสอบความเครียดจากสิ่งแวดล้อม
ความน่าเชื่อถือของ MEMS ขึ้นอยู่กับคุณสมบัติด้านสิ่งแวดล้อมที่เหมาะสมเป็นอย่างมาก สําหรับการใช้งานในยานยนต์ อุปกรณ์ต้องเป็นไปตามมาตรฐาน AEC-Q100 รวมถึงอายุการใช้งานที่อุณหภูมิสูง (HTOL) การหมุนเวียนอุณหภูมิ และการทดสอบแรงกระแทกทางกล MEMS ระดับผู้บริโภคอาจไม่รอดจากการปั่นจักรยานด้วยความร้อนของยานยนต์ตั้งแต่ -40°C ถึง 125°C หรือโปรไฟล์การกระแทกทางกลที่พบได้ทั่วไปในอุบัติเหตุทางรถยนต์
ความชื้นอาจส่งผลต่อประสิทธิภาพของ MEMS โดยเฉพาะอย่างยิ่งสําหรับอุปกรณ์ที่มีพอร์ตอะคูสติก (เซ็นเซอร์ความดัน ไมโครโฟน) แนะนําให้เคลือบ PCB แบบสอดคล้อง แต่หลีกเลี่ยงการปิดช่องเปิดพอร์ต MEMS เซ็นเซอร์ความดันบางตัวมีการป้องกันเจลเหนือไดอะแฟรมตรวจจับสําหรับการแยกสื่อ ให้ตรวจสอบว่าเหมาะสมกับของเหลวที่วัดได้
6. ข้อควรพิจารณาเกี่ยวกับห่วงโซ่อุปทานและการจัดหา
อุปกรณ์ MEMS ผลิตโดยซัพพลายเออร์จํานวนค่อนข้างน้อยโดยใช้กระบวนการผลิตเฉพาะทาง ทําให้การจัดการห่วงโซ่อุปทานมีความสําคัญต่อวงจรชีวิตของผลิตภัณฑ์ที่ยาวนาน
6.1 ซัพพลายเออร์ MEMS รายใหญ่และระยะเวลารอคอยสินค้า
| ซัพพลายเออร์ | สายผลิตภัณฑ์หลัก | ระยะเวลารอคอยสินค้าทั่วไป | จํานวนสั่งซื้อขั้นต่ํา | การรับรองที่สําคัญ |
|---|---|---|---|---|
| Bosch Sensortec | บ๊อช มาตรความเร่ง, ไจโรสโคป, เซ็นเซอร์ความดัน, เซ็นเซอร์สิ่งแวดล้อม 12–16 สัปดาห์ | 3,000–5,000 ชิ้น | AEC-Q100, IATF 16949 | ประเทศไทย |
| STMicroelectronics | เอสทีมิโคร IMU, มาตรความเร่ง, ไจโรสโคป, ไมโครโฟน MEMS | MIMU 14–20 สัปดาห์ | 5,000–10,000 ชิ้น | AEC-Q100, ISO 26262 |
| อินเวนเซนส์ (TDK) | IMU, ไจโรสโคป, เซ็นเซอร์ความดันประสิทธิภาพสูง | 12–18 สัปดาห์ | 2,500–7,500 ชิ้น | AEC-Q100 |
| อุปกรณ์อนาล็อก | เครื่องวัดความเร่ง MEMS ที่มีความแม่นยํา ไจโรสโคป | มิซูมิ 16–24 สัปดาห์ | 1,000–3,000 ชิ้น (ขึ้นอยู่กับเกรด) | AEC-Q100 ที่ผ่านการรับรองด้านการบินและอวกาศ |
| อินฟินีออน | ไมโครโฟน MEMS, เซ็นเซอร์ความดัน | MIMS 12–16 สัปดาห์ | 5,000 ชิ้น | ยานยนต์ที่ผ่านการรับรอง |
ระยะเวลารอคอยสินค้าขยายออกไปอย่างมากในช่วงไม่กี่ปีที่ผ่านมา เนื่องจากข้อจํากัดด้านกําลังการผลิตในโรงหล่อ MEMS และความต้องการยานยนต์ที่เพิ่มขึ้น สําหรับการผลิตในปริมาณมาก ให้มีส่วนร่วมกับซัพพลายเออร์ตั้งแต่เนิ่นๆ ในขั้นตอนการออกแบบและพิจารณาข้อตกลงการจัดหาระยะยาว ผู้ผลิต MEMS หลายรายเสนอตัวอย่างทางวิศวกรรมที่มีระยะเวลารอคอยสินค้าสั้นลงสําหรับการสร้างต้นแบบ แต่การเปลี่ยนไปใช้ใบสั่งผลิตต้องมีการวางแผนล่วงหน้า 6-9 เดือน
6.2 การจัดการความล้าสมัยและการจัดหาที่สอง
โดยทั่วไปผลิตภัณฑ์ MEMS จะมีวงจรชีวิต 7-10 ปี ซึ่งสั้นกว่าการใช้งานในอุตสาหกรรมหรือยานยนต์จํานวนมากที่ต้องการ ตรวจสอบการแจ้งเตือนการเปลี่ยนแปลงผลิตภัณฑ์ (PCN) และประกาศการสิ้นสุดอายุการใช้งาน (EOL) อย่างใกล้ชิด เมื่อเซ็นเซอร์ MEMS เข้าใกล้ EOL การย้ายไปยังรุ่นใหม่มักจะต้องมีการเปลี่ยนแปลงเฟิร์มแวร์เนื่องจากข้อกําหนดความไว โปรโตคอลการสื่อสาร หรือพินเอาต์ของแพ็คเกจที่แตกต่างกัน
การจัดหาที่สองอย่างแท้จริงสําหรับ MEMS นั้นท้าทาย เนื่องจากอุปกรณ์ของผู้ผลิตแต่ละรายมีลักษณะเฉพาะตัว แม้แต่ชิ้นส่วนที่ "เข้ากันได้" จากซัพพลายเออร์หลายรายก็ยังต้องมีการอัปเดตการสอบเทียบและการทดสอบการตรวจสอบความถูกต้อง สําหรับการใช้งานที่สําคัญ ให้เจรจาต่อรองปริมาณการซื้อครั้งสุดท้ายหรือพิจารณาทางเลือกอื่นที่เข้ากันได้กับพินที่ระบุในระหว่างขั้นตอนการออกแบบเริ่มต้น
ทํางานร่วมกับผู้จัดจําหน่ายที่ได้รับอนุญาต เช่น Digi-Key, Mouser หรือ Arrow ที่ให้การมองเห็นสินค้าคงคลังแบบเรียลไทม์และการตรวจสอบย้อนกลับเพื่อหลีกเลี่ยงส่วนประกอบปลอม เซ็นเซอร์ MEMS ปลอมแม้ว่าจะพบได้น้อยกว่าไอซี แต่ก็มีอยู่ในตลาด โดยเฉพาะอย่างยิ่งสําหรับอุปกรณ์ยานยนต์หรือเกรดอุตสาหกรรมที่มีมูลค่าสูง
7. คําถามที่พบบ่อย
อะไรคือความแตกต่างระหว่าง MEMS และเซ็นเซอร์เซมิคอนดักเตอร์แบบดั้งเดิม?
อุปกรณ์ MEMS รวมโครงสร้างทางกล (เช่น มวลแขวนลอย ไดอะแฟรม หรือลําแสงสะท้อน) เข้ากับวงจรอิเล็กทรอนิกส์บนชิปซิลิกอนตัวเดียวโดยใช้เทคนิคการผลิตเซมิคอนดักเตอร์ เซ็นเซอร์เซมิคอนดักเตอร์แบบดั้งเดิม เช่น เซ็นเซอร์ฮอลล์เอฟเฟกต์หรือโฟโตไดโอด อาศัยคุณสมบัติทางอิเล็กทรอนิกส์โดยไม่มีโครงสร้างทางกลเท่านั้น การผสานรวมทางกลและไฟฟ้านี้ช่วยให้ MEMS สามารถวัดปริมาณทางกายภาพ เช่น ความเร่ง ความดัน หรือการหมุนด้วยข้อได้เปรียบด้านขนาด กําลัง และต้นทุนที่ยอดเยี่ยมเมื่อเทียบกับเซ็นเซอร์เชิงกลแบบแยกส่วน
ฉันจะเลือกระหว่างเซ็นเซอร์ MEMS เอาต์พุตแบบอะนาล็อกและดิจิตอลได้อย่างไร
เซ็นเซอร์ MEMS แบบอะนาล็อกให้เอาต์พุตแรงดันไฟฟ้าหรือกระแสไฟฟ้าตามสัดส่วนของปริมาณที่วัดได้ ซึ่งต้องใช้ ADC ภายนอกและให้ความยืดหยุ่นสูงสุดในการประมวลผลสัญญาณ เลือกเอาต์พุตแบบอะนาล็อกเมื่อคุณต้องการการกรองแบบกําหนดเอง อัตราการสุ่มตัวอย่างที่สูงมาก (>10 kHz) หรือเมื่อรวมเข้ากับห่วงโซ่สัญญาณแอนะล็อกที่มีอยู่ เซ็นเซอร์ MEMS แบบดิจิตอล (SPI, I²C) ประกอบด้วย ADC ในตัว การชดเชยอุณหภูมิ และคุณสมบัติการทดสอบตัวเอง ทําให้การออกแบบระบบง่ายขึ้นและลดจํานวนส่วนประกอบ อินเทอร์เฟซดิจิทัลเป็นที่ต้องการสําหรับการออกแบบที่ทันสมัยที่สุด เว้นแต่อัตราการสุ่มตัวอย่างหรือข้อกําหนดการปรับแต่งจะกําหนดแบบอะนาล็อก
ฉันต้องใช้เกรด AEC-Q100 ใดสําหรับการใช้งาน MEMS ในยานยนต์
คุณสมบัติ AEC-Q100 กําหนดเกรดอุณหภูมิยานยนต์: เกรด 0 (-40°C ถึง 150°C) สําหรับห้องเครื่อง เกรด 1 (-40°C ถึง 125°C) สําหรับยานยนต์ทั่วไป เกรด 2 (-40°C ถึง 105°C) สําหรับห้องโดยสาร และเกรด 3 (-40°C ถึง 85°C) สําหรับระบบที่ไม่สําคัญ เซ็นเซอร์ MEMS สําหรับยานยนต์ส่วนใหญ่มีคุณสมบัติเกรด 1 สําหรับการใช้งาน ADAS หรือ ESC ที่มีความสําคัญต่อความปลอดภัย ให้ตรวจสอบการปฏิบัติตามข้อกําหนดด้านความปลอดภัยในการทํางาน ISO 26262 (โดยทั่วไปคือ ASIL B หรือ C) นอกเหนือจากคุณสมบัติพื้นฐานของ AEC-Q100
อุณหภูมิส่งผลต่อความแม่นยําของเซ็นเซอร์ MEMS อย่างไร
อุณหภูมิมีอิทธิพลต่อเซ็นเซอร์ MEMS ผ่านกลไกหลายอย่าง: การขยายตัวทางความร้อนเปลี่ยนขนาดโครงสร้างทางกล ซึ่งส่งผลต่อความไว คุณสมบัติของวัสดุที่ขึ้นอยู่กับอุณหภูมิจะเปลี่ยนลักษณะทางไฟฟ้าทําให้เกิดการดริฟท์ออฟเซ็ต และความเครียดของบรรจุภัณฑ์จะแตกต่างกันไปตามอุณหภูมิ ระบุงบประมาณข้อผิดพลาดทั้งหมด รวมถึงค่าสัมประสิทธิ์อุณหภูมิออฟเซ็ต (TCO) และค่าสัมประสิทธิ์ความไวของอุณหภูมิ (TCS) ตลอดช่วงการทํางานทั้งหมดของคุณ MEMS คุณภาพสูงรวมถึงการชดเชยอุณหภูมิภายใน แต่ข้อผิดพลาดตกค้าง 0.01%/°C (ความไว) และ 1 มก./°C หรือ 0.01°/s/°C (ออฟเซ็ต) เป็นเรื่องปกติแม้หลังจากการชดเชย
เซ็นเซอร์ MEMS สามารถทนต่อแรงกระแทกทางกลระหว่างการขนส่งและการจัดการได้หรือไม่
เซ็นเซอร์ MEMS ส่วนใหญ่ได้รับการจัดอันดับสําหรับการกระแทกทางกลในช่วง 3,000–10,000 กรัม เป็นเวลา <1 มิลลิวินาทีเมื่อไม่มีพลังงาน ซึ่งครอบคลุมสถานการณ์การขนส่งและการตกหล่นตามปกติ อย่างไรก็ตาม การทํางานด้วยพลังงานมักจะลดความทนทานต่อแรงกระแทกลงเหลือ 1,500–2,000 กรัม เนื่องจากวงจรภายในต้องยังคงใช้งานได้ ปฏิบัติตามคําแนะนําของผู้ผลิตเสมอสําหรับการหยุดและการติดตั้งเชิงกลเพื่อป้องกันความเสียหายจากมวลที่พิสูจน์ได้ สําหรับสภาพแวดล้อมที่มีแรงกระแทกรุนแรง (การชนของรถยนต์ การใช้งานทางทหาร) ให้ระบุอุปกรณ์ที่มีคุณสมบัติชัดเจนสําหรับการอยู่รอดที่มี g สูง และใช้การติดตั้ง PCB ที่เหมาะสมด้วยการแยกการสั่นสะเทือนหากจําเป็น
อะไรทําให้ไจโรสโคป MEMS ดริฟท์และฉันจะย่อขนาดได้อย่างไร
การดริฟท์ของไจโรสโคป MEMS (ความไม่เสถียรของอคติ) เป็นผลมาจากหลายแหล่ง: สัญญาณรบกวนอิเล็กทรอนิกส์ในวงจรการอ่านข้อมูลสัญญาณรบกวนทางกลและความร้อนในโครงสร้างที่สะท้อนและผลกระทบที่ขึ้นอยู่กับอุณหภูมิในกลไกการตรวจจับ Coriolis ลดการดริฟท์โดย: (1) รักษาอุณหภูมิการทํางานให้คงที่ผ่านการจัดการความร้อน (2) ใช้การประมาณอคติรันไทม์โดยใช้การอัปเดตความเร็วเป็นศูนย์หรือช่วงเวลาหยุดนิ่ง (3) การหลอมรวมข้อมูลไจโรสโคปกับอินพุตมาตรความเร่งและแมกนีโตมิเตอร์ผ่านการกรอง Kalman และ (4) การเลือกไจโรสโคประดับยานยนต์หรือยุทธวิธีที่มีความเสถียรของอคติ <5°/h สําหรับการใช้งานที่ต้องการการติดตามมุมที่แม่นยํา การสอบเทียบจากโรงงานในอุณหภูมิช่วยเพิ่มประสิทธิภาพให้ดียิ่งขึ้น
มีรอยเท้ามาตรฐานสําหรับเซ็นเซอร์ MEMS เพื่อเปิดใช้งานการจัดหาที่สองหรือไม่
เซ็นเซอร์ MEMS แตกต่างจากส่วนประกอบแบบพาสซีฟบางตัวตรงที่ไม่มีรอยเท้าที่เป็นมาตรฐานอย่างแท้จริงในผู้ผลิต อย่างไรก็ตาม มีประเภทแพ็คเกจทั่วไป: แพ็คเกจ LGA (land grid array) เช่น 3x3x1 มม. หรือ 2.5x3x0.9 มม. ถูกนํามาใช้กันอย่างแพร่หลาย และซัพพลายเออร์บางรายเสนอ "พินเอาต์มาตรฐานอุตสาหกรรม" ที่ออกแบบมาเพื่อความเข้ากันได้ อย่างไรก็ตาม การจัดหาที่สองมักต้องมีการออกแบบ PCB ใหม่หรือวงจรอะแดปเตอร์ เนื่องจากแม้แต่แพ็คเกจที่เข้ากันได้ทางกลไกก็อาจมีการกําหนดพิน โปรโตคอลการสื่อสาร หรือการวางแนวแกนติดตั้งที่แตกต่างกัน ออกแบบเลย์เอาต์ของคุณโดยคํานึงถึงรูปแบบรอยเท้าที่อาจเกิดขึ้นหากการจัดหาที่สองเป็นสิ่งสําคัญ
ต้องมีการทดสอบอะไรบ้างเพื่อตรวจสอบการเลือกเซ็นเซอร์ MEMS สําหรับการใช้งานของฉัน
การทดสอบการตรวจสอบความถูกต้องควรรวมถึง: (1) การทดสอบการทํางานในช่วงอุณหภูมิการทํางานเต็มรูปแบบเพื่อตรวจสอบข้อมูลจําเพาะของความแม่นยํา (2) การวัดการใช้พลังงานในโหมดการทํางานทั้งหมดเพื่อยืนยันการคํานวณอายุการใช้งานแบตเตอรี่ (3) การทดสอบแรงกระแทกทางกลและการสั่นสะเทือนตามโปรไฟล์ด้านสิ่งแวดล้อมของแอปพลิเคชันของคุณ (4) การทดสอบความเข้ากันได้ทางแม่เหล็กไฟฟ้า (EMC) เพื่อให้แน่ใจว่าเอาต์พุตของเซ็นเซอร์จะไม่เสียหายจากสัญญาณรบกวนของระบบ (5) การกําหนดลักษณะการดริฟท์ในระยะยาวหากความแม่นยําเมื่อเวลาผ่านไปเป็นสิ่งสําคัญ และ (6) การตรวจสอบการจัดตําแหน่งแกนเพื่อให้แน่ใจว่าระบบพิกัดเซ็นเซอร์ตรงกับกรอบอ้างอิงเชิงกลของคุณ สําหรับระบบที่มีความสําคัญต่อความปลอดภัย จําเป็นต้องมีการตรวจสอบความปลอดภัยในการทํางานเพิ่มเติมตาม ISO 26262 หรือ IEC 61508
8. บทสรุปและขั้นตอนต่อไป
เทคโนโลยี MEMS ได้เปลี่ยนการรวมเซ็นเซอร์ในระบบอิเล็กทรอนิกส์สมัยใหม่โดยพื้นฐาน โดยนําเสนอการผสมผสานที่ไม่เคยมีมาก่อนของขนาดที่เล็ก สิ้นเปลืองพลังงานต่ํา และความคุ้มค่า ซึ่งช่วยให้เกิดนวัตกรรมในการใช้งานยานยนต์ อุตสาหกรรม IoT และผู้บริโภค การเลือก MEMS ที่ประสบความสําเร็จจําเป็นต้องสร้างสมดุลระหว่างพารามิเตอร์ทางเทคนิคหลายตัว เช่น ความไวกับช่วง กําลังเทียบกับประสิทธิภาพ ความแม่นยําเทียบกับต้นทุน ในขณะที่พิจารณาความเสถียรของห่วงโซ่อุปทานในระยะยาวและข้อกําหนดด้านคุณสมบัติด้านสิ่งแวดล้อม
เมื่อเลือกส่วนประกอบ MEMS สําหรับการออกแบบของคุณ ให้จัดลําดับความสําคัญของข้อควรพิจารณาที่สําคัญเหล่านี้: ขั้นแรก ให้กําหนดช่วงการวัด ความแม่นยํา และข้อกําหนดแบนด์วิดท์ของแอปพลิเคชันของคุณอย่างชัดเจน เพื่อหลีกเลี่ยงการระบุเซ็นเซอร์ประสิทธิภาพสูงที่มีราคาแพงมากเกินไป หรือระบุน้อยเกินไปและต้องออกแบบใหม่ที่มีค่าใช้จ่ายสูง ประการที่สอง ประเมินผลกระทบของอุณหภูมิอย่างรอบคอบ และตรวจสอบให้แน่ใจว่าความแม่นยําที่ระบุรวมถึงช่วงอุณหภูมิการทํางานทั้งหมดของคุณ วางแผนเค้าโครง PCB และสถาปัตยกรรมแหล่งจ่ายไฟของคุณตั้งแต่เนิ่นๆ เพื่อลดการมีเพศสัมพันธ์ทางเสียงและผลกระทบจากความเครียดเชิงกล สุดท้าย ให้มีส่วนร่วมกับซัพพลายเออร์ในระหว่างขั้นตอนการออกแบบเพื่อรักษาความพร้อมใช้งานในระยะยาวและทําความเข้าใจระยะเวลารอคอยสินค้าสําหรับปริมาณการผลิต
สําหรับการใช้งานที่ต้องการความแม่นยําสูง ดริฟท์ต่ํา หรือการทํางานในสภาพแวดล้อมที่รุนแรง ให้ลงทุนในขั้นตอนการสอบเทียบที่เหมาะสมและอัลกอริธึมการหลอมรวมเซ็นเซอร์ ซึ่งแนวทางซอฟต์แวร์เหล่านี้มักจะให้ประสิทธิภาพโดยรวมของระบบที่ดีกว่าการเลือกอุปกรณ์ MEMS เกรดสูงสุด สําหรับยานยนต์หรือระบบที่มีความสําคัญต่อความปลอดภัย ให้ตรวจสอบทั้งคุณสมบัติ AEC-Q และการปฏิบัติตามข้อกําหนดด้านความปลอดภัยในการทํางาน (ISO 26262 หรือเทียบเท่า) ก่อนเสร็จสิ้นการออกแบบของคุณ
ขั้นตอนต่อไปที่แนะนํา:
- ดาวน์โหลดเอกสารข้อมูลโดยละเอียดสําหรับเซ็นเซอร์ MEMS ที่ตรงกับความต้องการในการใช้งานของคุณ
- ขอบอร์ดประเมินผลหรือชุดพัฒนาเพื่อตรวจสอบประสิทธิภาพในสภาพแวดล้อมระบบจริงของคุณก่อนที่จะตกลงกับคําสั่งซื้อในปริมาณมาก
- ปรึกษากับวิศวกรแอปพลิเคชันภาคสนาม (FAE) ของซัพพลายเออร์ของคุณเพื่อตรวจสอบการออกแบบ โดยเฉพาะอย่างยิ่งสําหรับโครงการบูรณาการ MEMS ครั้งแรก
- ใช้เครื่องมือการเลือกพาราเมตริกออนไลน์จากผู้ผลิตรายใหญ่เพื่อกรองตัวเลือกอย่างรวดเร็วตามข้อกําหนดหลัก
- หากออกแบบสําหรับวงจรชีวิตของผลิตภัณฑ์ที่ยาวนาน (>5 ปี) ให้สร้างการสื่อสารโดยตรงกับซัพพลายเออร์ MEMS เกี่ยวกับแผนงานผลิตภัณฑ์และการวางแผน EOL
ตลาด MEMS ยังคงพัฒนาอย่างรวดเร็ว โดยมีการปรับปรุงอย่างต่อเนื่องในด้านประสิทธิภาพเสียงรบกวน การรับทราบข้อมูลเกี่ยวกับการเปิดตัวอุปกรณ์ใหม่และความสามารถในการผลิตจะช่วยให้คุณเพิ่มประสิทธิภาพการออกแบบของคุณสําหรับทั้งการผลิตในปัจจุบันและรุ่นผลิตภัณฑ์ในอนาคต