

คู่มือการเลือกเซอร์โวมอเตอร์: วิธีเลือกมอเตอร์ที่เหมาะสมสําหรับการควบคุมการเคลื่อนไหวที่แม่นยํา
การเลือกเซอร์โวมอเตอร์ที่เหมาะสมสําหรับการใช้งานของคุณสามารถสร้างความแตกต่างระหว่างระบบที่ให้ประสิทธิภาพที่แม่นยําและเชื่อถือได้กับระบบที่ต่อสู้กับข้อผิดพลาดในการวางตําแหน่งความร้อนสูงเกินไปหรือความล้มเหลวก่อนเวลาอันควร ไม่ว่าคุณจะออกแบบแขนหุ่นยนต์ เครื่อง CNC สายการบรรจุอัตโนมัติ หรืออุปกรณ์ทางการแพทย์ การทําความเข้าใจพารามิเตอร์เซอร์โวมอเตอร์และเกณฑ์การคัดเลือกเป็นสิ่งสําคัญสําหรับวิศวกรและทีมจัดซื้อ
คู่มือนี้จะแนะนําคุณเกี่ยวกับพื้นฐานทางเทคนิค พารามิเตอร์การเลือกหลัก การแลกเปลี่ยนประสิทธิภาพ และข้อควรพิจารณาในการออกแบบที่คุณต้องระบุและจัดหาเซอร์โวมอเตอร์ที่เหมาะสมที่สุดสําหรับแอปพลิเคชันควบคุมการเคลื่อนไหวของคุณ
สารบัญ
- เซอร์โวมอเตอร์คืออะไรและทํางานอย่างไร
- [พารามิเตอร์ทางเทคนิคที่สําคัญสําหรับการเลือกเซอร์โวมอเตอร์] (# 2-key-technical-parameters-for-servo-motor-selection)
- [วิธีการคํานวณแรงบิดและความเฉื่อยที่ต้องการ] (# 3 วิธีการคํานวณแรงบิดและความเฉื่อยที่ต้องการ)
- [เซอร์โวมอเตอร์กับสเต็ปเปอร์มอเตอร์: เมื่อใดควรใช้] (#4-เซอร์โวมอเตอร์กับสเต็ปเปอร์มอเตอร์เมื่อไหร่จะใช้)
- [ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไป] (#5-ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไป)
- [ข้อควรพิจารณาเกี่ยวกับห่วงโซ่อุปทานและการจัดหา] (#6-ข้อควรพิจารณาเกี่ยวกับห่วงโซ่อุปทานและการจัดหา)
- คําถามที่พบบ่อย
- สรุป
1. เซอร์โวมอเตอร์คืออะไรและทํางานอย่างไร
เซอร์โวมอเตอร์เป็นแอคชูเอเตอร์แบบหมุนหรือเชิงเส้นที่ให้การควบคุมตําแหน่งเชิงมุมหรือเชิงเส้นความเร็วและความเร่งที่แม่นยํา เซอร์โวมอเตอร์ต่างจากมอเตอร์มาตรฐานที่หมุนเพียงแค่หมุนเมื่อขับเคลื่อนเซอร์โวมอเตอร์จะรวมอุปกรณ์ป้อนกลับซึ่งโดยทั่วไปจะเป็นตัวเข้ารหัสหรือตัวแก้ไขซึ่งจะรายงานตําแหน่งเพลาจริงกลับไปยังตัวควบคุมอย่างต่อเนื่อง
สถาปัตยกรรมการควบคุมวงปิดนี้ช่วยให้ระบบเซอร์โวสามารถตรวจจับและแก้ไขข้อผิดพลาดในการวางตําแหน่งได้แบบเรียลไทม์ เมื่อคอนโทรลเลอร์ส่งคําสั่งตําแหน่ง ไดรฟ์จะเปรียบเทียบตําแหน่งที่ได้รับคําสั่งกับข้อเสนอแนะของตัวเข้ารหัส การเบี่ยงเบนใด ๆ จะสร้างสัญญาณข้อผิดพลาดที่ไดรฟ์ใช้เพื่อปรับกระแสมอเตอร์นําเพลาไปยังตําแหน่งเป้าหมายที่แน่นอน
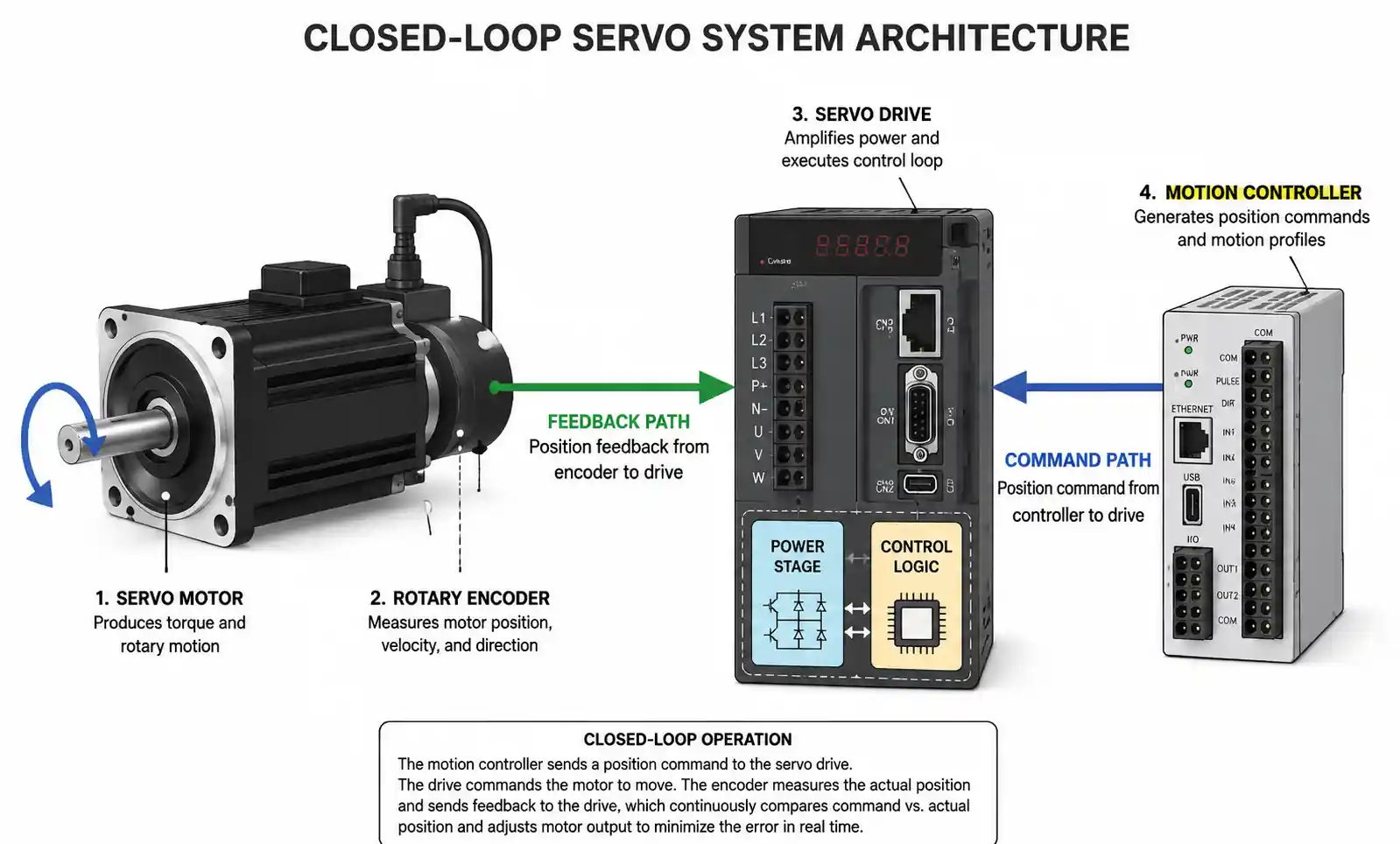
ส่วนประกอบหลักของระบบเซอร์โว ได้แก่ ตัวมอเตอร์ตัวเข้ารหัสหรือตัวแก้ไขสําหรับการป้อนกลับตําแหน่งเซอร์โวไดรฟ์ที่ตีความคําสั่งและควบคุมกระแสและตัวควบคุมการเคลื่อนไหวที่สร้างโปรไฟล์วิถี ในงานอุตสาหกรรมเซอร์โวมอเตอร์มีคุณค่าในด้านความสามารถในการดําเนินการโปรไฟล์การเคลื่อนไหวที่ซับซ้อนด้วยความเร่งสูงเวลาตกตะกอนที่รวดเร็วและความแม่นยําในการวางตําแหน่งที่ทําซ้ําได้จนถึงอาร์ควินาที
เซอร์โวมอเตอร์มีให้เลือกทั้งแบบ AC และ DC เซอร์โวมอเตอร์ AC ครองระบบอัตโนมัติทางอุตสาหกรรมเนื่องจากความหนาแน่นของพลังงานที่สูงขึ้นประสิทธิภาพการระบายความร้อนที่ดีขึ้นและการออกแบบแบบไร้แปรงถ่านที่ช่วยลดการบํารุงรักษา เซอร์โวมอเตอร์กระแสตรงยังคงพบได้ทั่วไปในการใช้งานที่ใช้พลังงานต่ําและระบบเดิม แม้ว่าเซอร์โวมอเตอร์กระแสตรงแบบไม่มีแปรงถ่าน (BLDC) จะเข้ามาแทนที่การออกแบบแบบแปรงถ่านในอุปกรณ์ใหม่เป็นส่วนใหญ่
2. พารามิเตอร์ทางเทคนิคที่สําคัญสําหรับการเลือกเซอร์โวมอเตอร์
การเลือกเซอร์โวมอเตอร์ที่เหมาะสมจําเป็นต้องเข้าใจว่าข้อกําหนดแต่ละรายการส่งผลต่อประสิทธิภาพ ความน่าเชื่อถือ และต้นทุนของแอปพลิเคชันของคุณอย่างไร พารามิเตอร์ต่อไปนี้เป็นรากฐานของการตัดสินใจเลือกเซอร์โวมอเตอร์
ข้อมูลจําเพาะแรงบิด
แรงบิดที่กําหนด (แรงบิดต่อเนื่อง) กําหนดแรงบิดสูงสุดที่มอเตอร์สามารถส่งได้อย่างต่อเนื่องโดยไม่เกิดความร้อนสูงเกินไป นี่คือแรงบิดที่มีให้สําหรับการทํางานที่ยั่งยืน และควรเกินข้อกําหนดแรงบิดเฉลี่ยของแอปพลิเคชันของคุณโดยมีระยะขอบที่เพียงพอ แรงบิดสูงสุด (แรงบิดสูงสุด) แสดงถึงแรงบิดในระยะเวลาสั้น ๆ ที่มีให้สําหรับการเร่งความเร็ว การชะลอตัว หรือการเอาชนะโหลดที่พุ่งสูงขึ้นทันที ซึ่งโดยทั่วไปจะ 2 ถึง 3 เท่าของแรงบิดที่กําหนด
เมื่อปรับขนาดแรงบิด ให้คํานึงถึงการสูญเสียแรงเสียดทาน แรงโน้มถ่วง (สําหรับแกนแนวตั้ง) แรงบิดในการเร่งความเร็ว และปัจจัยด้านความปลอดภัย 1.2 ถึง 1.5 แรงบิดที่เล็กเกินไปนําไปสู่การพลาดขั้นตอนข้อผิดพลาดในการวางตําแหน่งและความผิดพลาดของไดรฟ์ การขยายขนาดใหญ่ทําให้เสียเงินทุนและพื้นที่แผง
ช่วงความเร็ว
ความเร็วที่กําหนดระบุความเร็วต่อเนื่องสูงสุดของมอเตอร์ที่แรงบิดที่กําหนด แรงบิดที่มีอยู่จะลดลงเนื่องจากข้อจํากัดของ back-EMF ในเซอร์โวมอเตอร์ AC ความเร็วสูงสุดกําหนดขีดจํากัดความเร็วสัมบูรณ์ แม้ว่าแรงบิดอาจลดลงอย่างมาก ณ จุดนี้
สําหรับการใช้งานที่ต้องการแรงบิดคงที่ในช่วงความเร็วกว้าง ให้พิจารณามอเตอร์ที่มีความสามารถในการอ่อนตัวของสนามหรือการลดกระปุกเกียร์ การใช้งานความเร็วสูงต้องการความใส่ใจอย่างรอบคอบกับความสมดุลทางกล การเลือกตลับลูกปืน และความละเอียดของตัวเข้ารหัส
อัตราส่วนความเฉื่อยและความเฉื่อย
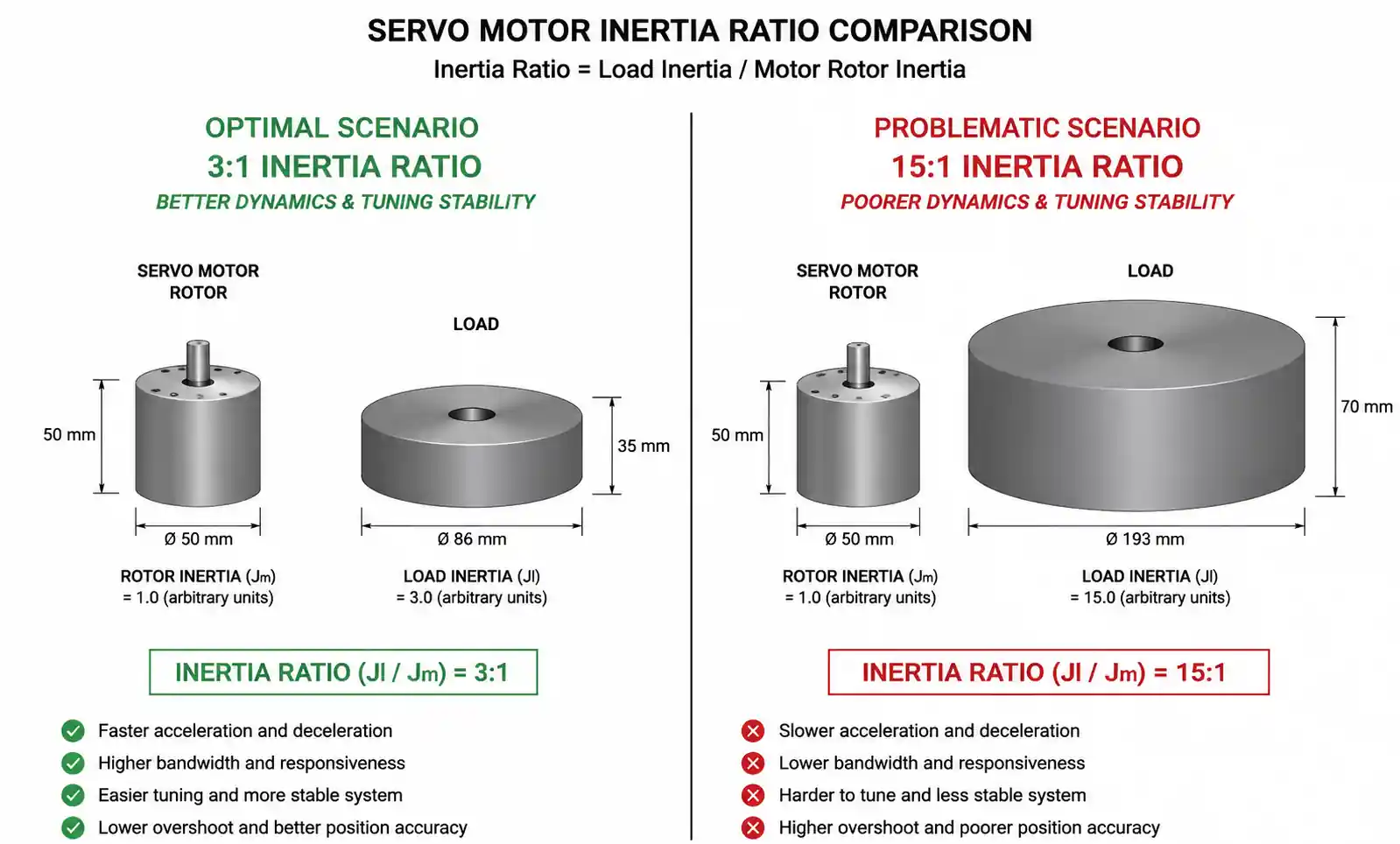
ความเฉื่อยของมอเตอร์ (ความเฉื่อยของโรเตอร์) วัดความต้านทานของโรเตอร์ต่อความเร่งเชิงมุม ความเฉื่อยของโหลดแสดงถึงความเฉื่อยที่สะท้อนกลับของส่วนประกอบที่เคลื่อนไหวทั้งหมดที่ติดอยู่กับเพลามอเตอร์ อัตราส่วนความเฉื่อย (ความเฉื่อยของโหลดหารด้วยความเฉื่อยของมอเตอร์) ส่งผลอย่างมากต่อไดนามิกของระบบและความเสถียรในการปรับแต่ง
แนวทางการออกแบบแบบดั้งเดิมกําหนดเป้าหมายอัตราส่วนความเฉื่อยระหว่าง 1:1 ถึง 10:1 เพื่อการปรับแต่งและการตอบสนองที่เหมาะสมที่สุด อัตราส่วนที่สูงกว่า 10:1 อาจนําไปสู่การตอบสนองที่ช้า โอเวอร์ชูต และความยากลําบากในการปรับแต่งที่เสถียร เซอร์โวไดรฟ์สมัยใหม่ที่มีอัลกอริธึมการปรับแต่งขั้นสูงสามารถจัดการกับอัตราส่วนที่สูงขึ้น แต่อัตราส่วนที่ต่ํากว่าโดยทั่วไปจะให้ประสิทธิภาพที่ดีกว่า
ความละเอียดของตัวเข้ารหัส
ความละเอียดของตัวเข้ารหัสกําหนดความแม่นยําของตําแหน่งและความแม่นยําในการป้อนกลับ ประเภทตัวเข้ารหัสทั่วไป ได้แก่ ตัวเข้ารหัสที่เพิ่มขึ้น (การวัดตําแหน่งสัมพัทธ์ผ่านพัลส์สี่เหลี่ยมจัตุรัส) ตัวเข้ารหัสแบบสัมบูรณ์ (รายงานตําแหน่งสัมบูรณ์แม้หลังจากไฟฟ้าดับ) และตัวแก้ไข (อุปกรณ์แอนะล็อกที่มีภูมิคุ้มกันเสียงรบกวนสูง) ความละเอียดระบุเป็นจํานวนต่อรอบ (CPR) หรือบิตสําหรับตัวเข้ารหัสแบบสัมบูรณ์
ความละเอียดที่สูงขึ้นช่วยเพิ่มความแม่นยําในการวางตําแหน่งและช่วยให้เคลื่อนไหวได้อย่างราบรื่นขึ้นที่ความเร็วต่ํา แต่เพิ่มต้นทุนของระบบและข้อกําหนดในการประมวลผลข้อมูล สําหรับการใช้งานการกําหนดตําแหน่งที่แม่นยํา ตัวเข้ารหัสแบบสัมบูรณ์ 17 บิตถึง 23 บิตเป็นเรื่องปกติ สําหรับงานที่มีความต้องการน้อยกว่า ตัวเข้ารหัส 13 บิตถึง 16 บิตก็เพียงพอแล้ว
ข้อมูลจําเพาะทางไฟฟ้า
แรงดันไฟฟ้าและกระแสไฟที่กําหนดจุดทํางานทางไฟฟ้าของมอเตอร์และกําหนดความเข้ากันได้ของไดรฟ์ แรงดันไฟฟ้าอุตสาหกรรมทั่วไป ได้แก่ 230VAC เฟสเดียวและ 400VAC สามเฟสสําหรับเซอร์โวมอเตอร์ AC ค่าคงที่ของมอเตอร์ (Kt) สัมพันธ์กับกระแสกับแรงบิด ในขณะที่ค่าคงที่แรงดันไฟฟ้า (Ke) เกี่ยวข้องกับความเร็วกับ EMF ย้อนกลับ
ลักษณะทางความร้อน ได้แก่ ความต้านทานความร้อนและค่าคงที่เวลาความร้อน ซึ่งกําหนดว่ามอเตอร์จะร้อนภายใต้ภาระและเย็นลงเร็วเพียงใดในช่วงเวลาที่ไม่ได้ใช้งาน การจัดการความร้อนที่เหมาะสมเป็นสิ่งสําคัญสําหรับการใช้งานที่ทํางานต่อเนื่อง
| พารามิเตอร์ | ช่วงทั่วไป | เกณฑ์การคัดเลือก |
|---|---|---|
| แรงบิดสูงสุด | 0.05 นิวตันเมตร – 100 นิวตันเมตร+ | ต้องเกินแรงบิดโหลดเฉลี่ย 20-50% |
| แรงบิดสูงสุด | แรงบิดพิกัด 2x – 3x | ต้องรับมือกับจุดสูงสุดของการเร่งความเร็วและการชะลอตัว |
| ความเร็วสูงสุด | 1000 – 6000 รอบต่อนาที | ควรใช้ความเร็วสูงสุดเกิน 10-20% |
| อัตราส่วนความเฉื่อย | 1:1 – 10:1 (เหมาะสมที่สุด) | อัตราส่วนที่ต่ํากว่าช่วยปรับปรุงการปรับแต่งและการตอบสนอง |
| ความละเอียดของตัวเข้ารหัส | 13 บิต – 23 บิต | 13 บิต ความละเอียดที่สูงขึ้นเพื่อการวางตําแหน่งที่แม่นยํา |
| แรงดันไฟฟ้า | 230 V AC / 400 V AC | 230 V AC |
หลังจาก view ตารางนี้ ให้ตรวจสอบว่ามอเตอร์ที่คุณเลือกมีระยะขอบแรงบิดเพียงพอที่ความเร็วสูงสุดที่ต้องการ แอพพลิเคชั่นจํานวนมากล้มเหลวเนื่องจากวิศวกรกําหนดขนาดแรงบิดสูงสุดโดยไม่ตรวจสอบว่าแรงบิดนั้นมีอยู่ที่ความเร็วในการทํางานหรือไม่
3. วิธีคํานวณแรงบิดและความเฉื่อยที่ต้องการ
การคํานวณแรงบิดและความเฉื่อยที่แม่นยําช่วยป้องกันการลดขนาดลง (นําไปสู่ข้อผิดพลาดในการวางตําแหน่งและความผิดพลาดของไดรฟ์) และขนาดใหญ่เกินไป (สิ้นเปลืองเงินทุนและการปรับแต่งที่ซับซ้อน) วิธีการต่อไปนี้ใช้กับการใช้งานเซอร์โวแบบหมุนส่วนใหญ่
การคํานวณแรงบิด
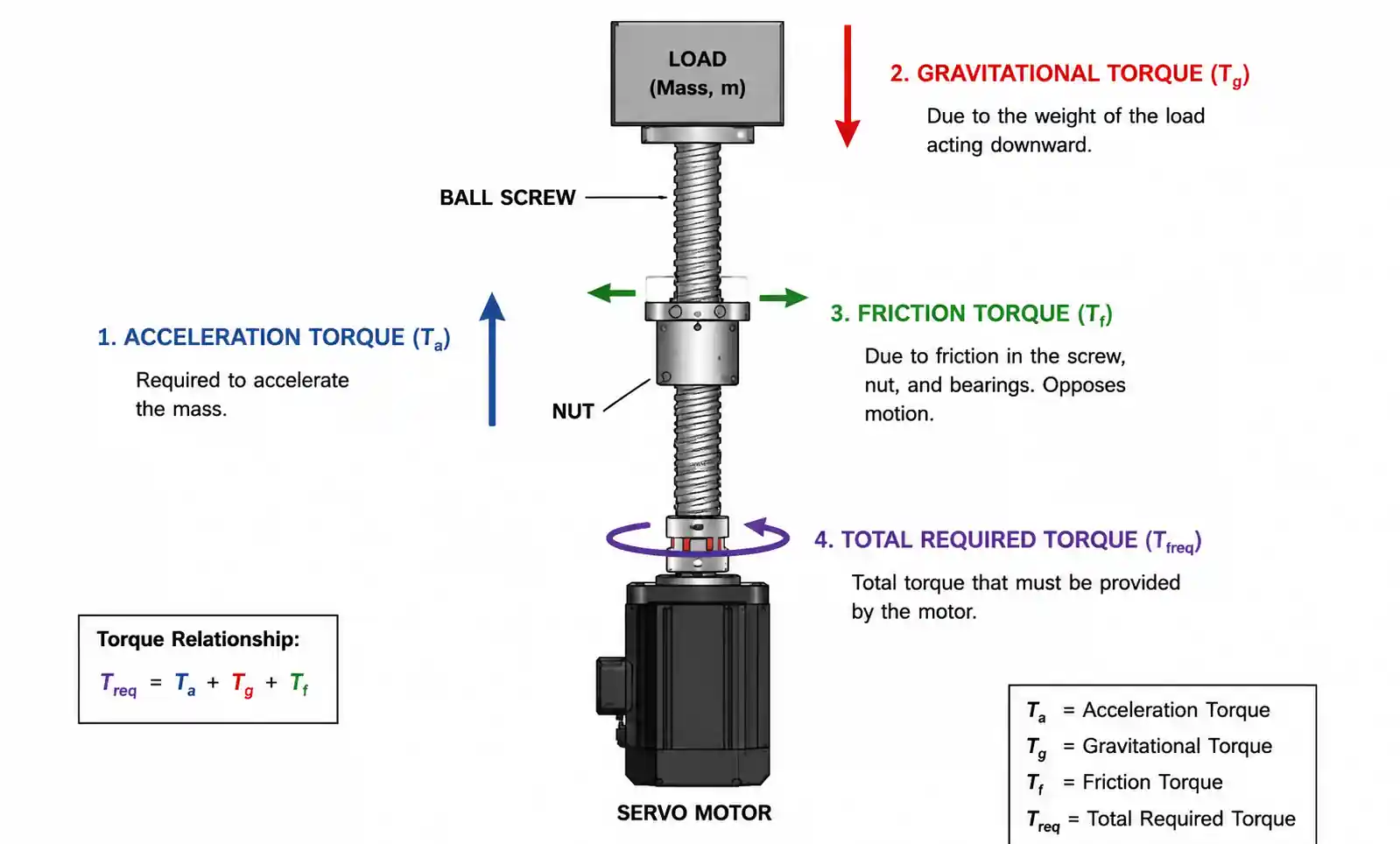
แรงบิดที่ต้องการทั้งหมดประกอบด้วยสี่องค์ประกอบ: แรงบิดเร่งแรงบิดแรงเสียดทานแรงบิดแรงโน้มถ่วง (สําหรับแกนแนวตั้งหรือแกนเอียง) และแรงบิดในกระบวนการ (แรงตัดความต้านทานของวัสดุ ฯลฯ )
แรงบิดในการเร่งความเร็ว คํานวณได้ดังนี้ T_accel = J_total × α โดยที่ J_total คือความเฉื่อยของระบบทั้งหมด (มอเตอร์บวกโหลด) และ α คือความเร่งเชิงมุมในหน่วย rad/s² สําหรับแกนเชิงเส้นที่มีบอลสกรูหรือตัวขับเคลื่อนสายพาน ให้สะท้อนมวลเชิงเส้นและความเร่งไปยังเพลามอเตอร์โดยใช้ข้อได้เปรียบทางกล
แรงบิดแรงเสียดทาน รวมถึงแรงเสียดทานของแบริ่ง การลากซีล และแรงเสียดทานในการเลื่อน สําหรับบอลสกรู แรงบิดแรงเสียดทานโดยทั่วไปจะอยู่ที่ 5-10% ของแรงโน้มถ่วงและแรงบิดในกระบวนการ สําหรับสายพานขับเคลื่อนการสูญเสียแรงเสียดทานมีตั้งแต่ 15-30% ขึ้นอยู่กับความตึงของสายพานและคุณภาพของตลับลูกปืนรอก
แรงบิดโน้มถ่วง สําหรับแกนแนวตั้งคือ: T_grav = m × g × r โดยที่ m คือมวลโหลด g คือความเร่งโน้มถ่วง (9.81 m/s²) และ r คือรัศมีที่มีประสิทธิภาพ (เช่น ตะกั่วสกรูหารด้วย 2π สําหรับบอลสกรู)
แรงบิดในกระบวนการ ขึ้นอยู่กับการใช้งาน เช่น แรงตัดในเครื่อง CNC แรงดึงของวัสดุในการจัดการเว็บ หรือแรงจับในหุ่นยนต์ ศึกษาข้อมูลทางวิศวกรรมเฉพาะแอปพลิเคชันสําหรับค่าเหล่านี้
เพิ่มส่วนประกอบทั้งสี่และใช้ปัจจัยด้านความปลอดภัย 1.2 ถึง 1.5 เพื่อพิจารณาความไม่แน่นอนของแบบจําลอง ความคลาดเคลื่อนในการผลิต และอายุ
การคํานวณความเฉื่อย
คํานวณความเฉื่อยสะท้อนของส่วนประกอบที่เคลื่อนที่แต่ละชิ้นโดยใช้สูตรมาตรฐาน: สําหรับมวลทรงกระบอกหมุน J = 0.5 × m × r²; สําหรับมวลเชิงเส้นที่เคลื่อนที่ผ่านสกรู J = m × (ตะกั่ว / 2π)²; สําหรับมวลเชิงเส้นที่ขับเคลื่อนด้วยสายพาน J = m × r² โดยที่ r คือรัศมีรอก
รวมความเฉื่อยของโหลดที่สะท้อนกลับทั้งหมดและเปรียบเทียบกับความเฉื่อยของโรเตอร์ของมอเตอร์เพื่อกําหนดอัตราส่วนความเฉื่อย หากอัตราส่วนเกิน 10:1 ให้พิจารณาใช้กระปุกเกียร์เพื่อลดความเฉื่อยของโหลดที่สะท้อนกลับ หรือเลือกมอเตอร์ขนาดใหญ่ที่มีความเฉื่อยของโรเตอร์สูงกว่า
4. เซอร์โวมอเตอร์กับสเต็ปเปอร์มอเตอร์: เมื่อใดควรใช้อันไหน
เซอร์โวมอเตอร์และสเต็ปเปอร์มอเตอร์ต่างให้การควบคุมตําแหน่งที่แม่นยํา แต่ทํางานบนหลักการที่แตกต่างกันโดยพื้นฐานและเหมาะกับความต้องการในการใช้งานที่แตกต่างกัน การทําความเข้าใจการแลกเปลี่ยนช่วยให้วิศวกรตัดสินใจเลือกได้อย่างคุ้มค่า
สถาปัตยกรรมการควบคุม
สเต็ปเปอร์มอเตอร์ทํางานแบบวงเปิด: คอนโทรลเลอร์จะส่งพัลส์สเต็ป และมอเตอร์จะหมุนมุมคงที่ต่อพัลส์โดยไม่มีการป้อนกลับ ความเรียบง่ายนี้ช่วยลดต้นทุนและความซับซ้อนของระบบ แต่ไม่มีการตรวจสอบว่ามอเตอร์มาถึงตําแหน่งที่กําหนดจริงหรือไม่ หากมอเตอร์หยุดทํางานหรือข้ามขั้นตอนเนื่องจากโหลดมากเกินไป
เซอร์โวมอเตอร์ทํางานแบบวงปิด: ตัวเข้ารหัสจะรายงานตําแหน่งจริงอย่างต่อเนื่อง และไดรฟ์จะแก้ไขความเบี่ยงเบนระหว่างตําแหน่งที่ได้รับคําสั่งและตําแหน่งจริง ข้อเสนอแนะนี้ช่วยให้มีประสิทธิภาพสูงขึ้น แต่ต้องใช้ไดรฟ์และการปรับแต่งที่ซับซ้อนมากขึ้น
การเปรียบเทียบประสิทธิภาพ
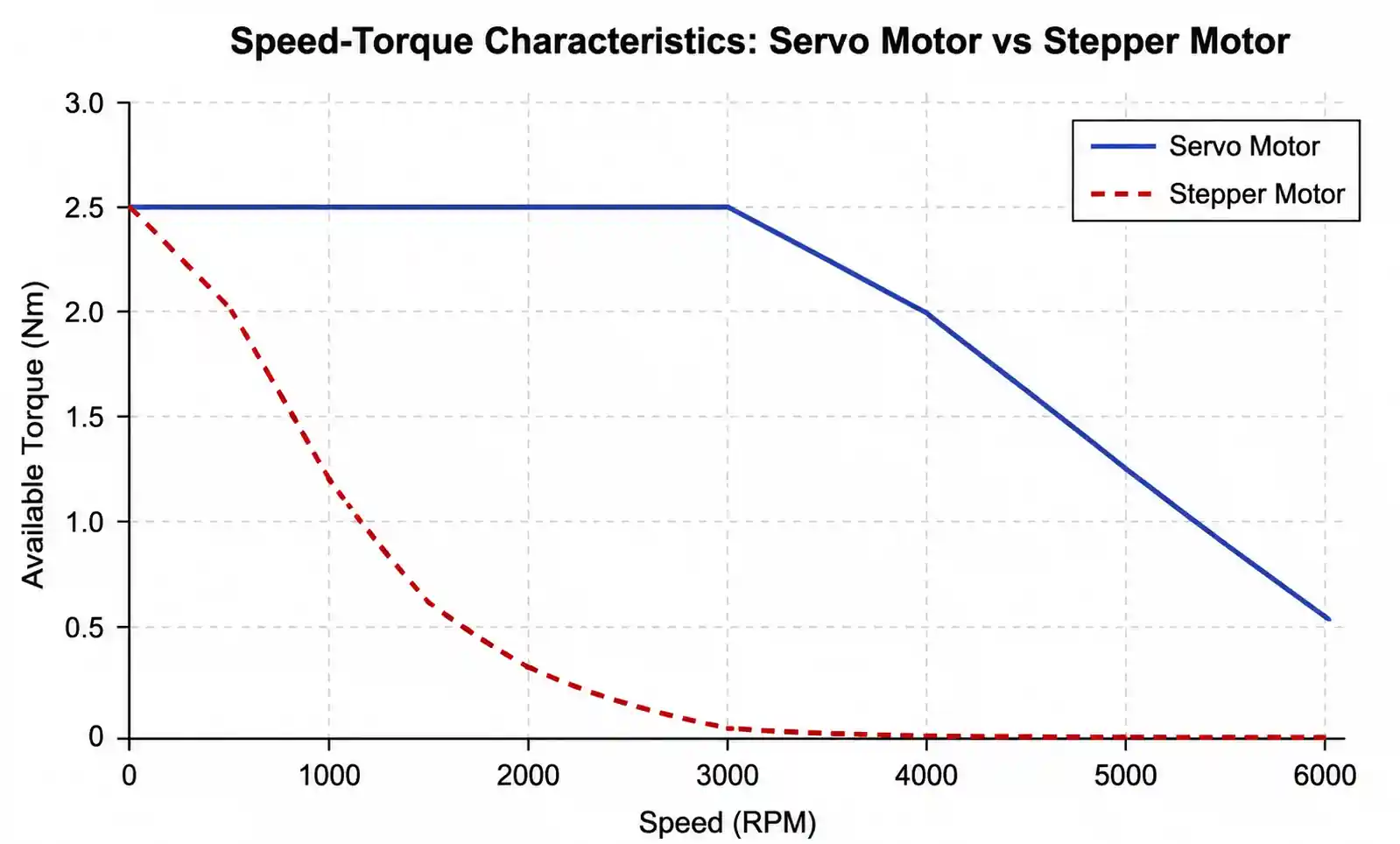
เซอร์โวมอเตอร์ให้ความเร็วและความเร่งที่สูงกว่าสเต็ปเปอร์อย่างมีนัยสําคัญ ในขณะที่สเต็ปเปอร์มักจะทํางานต่ํากว่า 2000 รอบต่อนาทีและสูญเสียแรงบิดอย่างรวดเร็วที่ความเร็วที่สูงขึ้น แต่เซอร์โวมอเตอร์จะรักษาแรงบิดสูงตลอดช่วงความเร็วทั้งหมดและสามารถเข้าถึง 6000 รอบต่อนาทีขึ้นไป สิ่งนี้ทําให้เซอร์โวเป็นตัวเลือกที่ชัดเจนสําหรับการใช้งานที่มีปริมาณงานสูงและเครื่องจักรรอบเร็ว
อัตราส่วนแรงบิดต่อความเฉื่อยชอบเซอร์โวมอเตอร์ส่งผลให้อัตราเร่งเร็วขึ้นและรอบเวลาสั้นลง เซอร์โวมอเตอร์ยังให้การทํางานที่ราบรื่นและเงียบตลอดช่วงความเร็วทั้งหมดในขณะที่สเต็ปเปอร์สามารถแสดงเสียงสะท้อนและการสั่นสะเทือนที่ความเร็วที่กําหนดเว้นแต่จะปรับด้วยไมโครสเต็ปปิ้งหรือแดมเปอร์
ประสิทธิภาพการใช้พลังงานเป็นข้อดีของเซอร์โวอีกประการหนึ่ง สเต็ปเปอร์ดึงกระแสไฟฟ้าเต็มอย่างต่อเนื่องเพื่อรักษาแรงบิดแม้จะอยู่กับที่ เซอร์โวมอเตอร์ดึงกระแสไฟฟ้าตามความจําเป็นเท่านั้นเพื่อรักษาตําแหน่งหรือเคลื่อนย้ายโหลดลดการใช้พลังงานและการสร้างความร้อนในตู้ควบคุม
ต้นทุนและความซับซ้อน
สเต็ปเปอร์มอเตอร์มีราคาต่ํากว่าเซอร์โวมอเตอร์ที่มีขนาดใกล้เคียงกันอย่างมาก และสเต็ปเปอร์ไดรฟ์นั้นง่ายกว่าและราคาถูกกว่าเซอร์โวไดรฟ์ สําหรับการใช้งานที่มีประสิทธิภาพต่ําพร้อมโหลดที่คาดการณ์ได้และความต้องการความเร็วปานกลาง สเต็ปเปอร์ให้ข้อได้เปรียบด้านต้นทุนที่น่าสนใจ
ระบบเซอร์โวต้องการการปรับอัตราขยาย PID และขีดจํากัดความเร็ว/ความเร่งเพื่อให้ได้ประสิทธิภาพที่เสถียรและตอบสนองได้ดี ระบบสเต็ปเปอร์ไม่ต้องการการปรับแต่ง แต่อาจต้องใช้ไมโครสเต็ปปิ้งและเสียงสะท้อน damp เพื่อการทํางานที่ราบรื่น
| เกณฑ์ | สเต็ปเปอร์มอเตอร์ | เซอร์โวมอเตอร์ | เซอร์โวมอเตอร์ |---|---|---| | วิธีการควบคุม | วงเปิด (ไม่มีข้อเสนอแนะ) | วงปิด (ข้อเสนอแนะของตัวเข้ารหัส) | | ช่วงความเร็ว | สูงสุด 2000 รอบต่อนาทีโดยทั่วไป | สูงสุด 6000+ รอบต่อนาที | | แรงบิดที่ความเร็วสูง| ลดลงอย่างมีนัยสําคัญเหนือ 1000 รอบต่อนาที | รักษาแรงบิดให้อยู่ในความเร็วที่กําหนด | ความแม่นยําในการวางตําแหน่ง | มุมขั้นบันได ±5% (ไม่มีการแก้ไขข้อผิดพลาด) | อาร์ควินาทีพร้อมข้อเสนอแนะ | | การเร่งความเร็ว | ปานกลาง (จํากัดด้วยความเฉื่อย) | สูง (อัตราส่วนแรงบิดต่อความเฉื่อยที่ดีกว่า) | | ประสิทธิภาพการใช้พลังงาน | Synology Inc. ต่ํากว่า (กระแสต่อเนื่อง) | สูงกว่า (ตามความต้องการในปัจจุบัน) | | ต้นทุนเริ่มต้น | ต่ํากว่า | สูงกว่า | | ต้องปรับแต่ง | ไม่ | ใช่ (กําไร PID) | | การใช้งานทั่วไป | เครื่องพิมพ์ 3 มิติ การวางตําแหน่งพื้นฐาน ระบบอัตโนมัติความเร็วต่ํา | เครื่องพิมพ์ เครื่อง CNC, หุ่นยนต์, บรรจุภัณฑ์ความเร็วสูง, การประกอบที่แม่นยํา
ปัจจัยการตัดสินใจที่สําคัญคือข้อกําหนดด้านประสิทธิภาพของแอปพลิเคชัน หากแอปพลิเคชันของคุณต้องการความเร็วสูงการเร่งความเร็วที่รวดเร็วการจัดการโหลดแบบไดนามิกหรือความแม่นยําในการวางตําแหน่งที่ผ่านการตรวจสอบแล้วเซอร์โวมอเตอร์จะปรับต้นทุนที่สูงขึ้น หากโหลดสามารถคาดการณ์ได้ ความเร็วปานกลาง และต้นทุนเป็นสิ่งสําคัญ สเต็ปเปอร์จะให้ประสิทธิภาพที่เพียงพอด้วยการลงทุนที่ต่ําลง
5. ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไป
การรวมเซอร์โวมอเตอร์ที่เหมาะสมต้องให้ความสนใจกับรายละเอียดการออกแบบทางไฟฟ้า เครื่องกล และความร้อน ข้อควรพิจารณาต่อไปนี้ช่วยหลีกเลี่ยงข้อผิดพลาดในการออกแบบที่พบบ่อยที่สุดซึ่งนําไปสู่ประสิทธิภาพการทํางานต่ําหรือความล้มเหลวก่อนเวลาอันควร
การบูรณาการทางกล
การเลือกข้อต่อเพลาที่เหมาะสมเป็นสิ่งสําคัญ ข้อต่อแบบแข็งส่งแรงบิดสูงสุดและความแม่นยําในการวางตําแหน่ง แต่ต้องการการจัดตําแหน่งที่แม่นยําเพื่อป้องกันความเสียหายของตลับลูกปืน ข้อต่อแบบยืดหยุ่นทนต่อการเยื้องศูนย์เล็กน้อย แต่ทําให้เกิดฟันเฟืองและการปฏิบัติตามข้อกําหนดที่ทําให้ประสิทธิภาพการวางตําแหน่งลดลง สําหรับการใช้งานที่มีความแม่นยํา ให้ใช้เครื่องสูบลมหรือข้อต่อแบบดิสก์ที่มีฟันเฟืองน้อยที่สุดและมีความแข็งบิดสูง
ความแข็งในการติดตั้งส่งผลต่อเสียงสะท้อนของระบบและความแม่นยําของตําแหน่ง ติดตั้งเซอร์โวมอเตอร์กับโครงสร้างที่แข็งแรงโดยใช้ตัวยึดที่มีแรงบิดอย่างเหมาะสม หลีกเลี่ยงการโหลดแบบเท้าแขนที่สร้างภาระด้านข้างบนตลับลูกปืนมอเตอร์ทําให้อายุการใช้งานของตลับลูกปืนสั้นลง
เมื่อใช้กระปุกเกียร์ให้เลือกตัวลดไดรฟ์ดาวเคราะห์หรือฮาร์มอนิกคุณภาพสูงโดยมีฟันเฟืองน้อยที่สุด ฟันเฟืองในระบบขับเคลื่อนแปลเป็นข้อผิดพลาดในการวางตําแหน่งโดยตรง สําหรับการใช้งานเซอร์โว ให้ระบุกระปุกเกียร์ที่มีฟันเฟืองต่ํากว่า 5 อาร์ค-นาที
การเดินสายไฟฟ้าและการต่อสายดิน
การเดินสายเคเบิลที่เหมาะสมช่วยป้องกันการรบกวนทางแม่เหล็กไฟฟ้า (EMI) ที่อาจทําให้สัญญาณตัวเข้ารหัสเสียหายและทําให้เกิดข้อผิดพลาดหรือข้อผิดพลาดในการวางตําแหน่ง เดินสายไฟมอเตอร์และสายสัญญาณตัวเข้ารหัสในท่อร้อยสายแยกต่างหาก ใช้สายเคเบิลคู่บิดเกลียวที่มีฉนวนหุ้มสําหรับสัญญาณตัวเข้ารหัส และเชื่อมต่อตัวป้องกันกับกราวด์ไดรฟ์ที่ปลายด้านหนึ่งเท่านั้นเพื่อหลีกเลี่ยงกราวด์ลูป
ตรวจสอบให้แน่ใจว่ามีเกจสายไฟเพียงพอสําหรับสายไฟของมอเตอร์เพื่อลดปริมาตร tag ลดลง โดยเฉพาะอย่างยิ่งสําหรับการเดินสายเคเบิลที่ยาว แรงดันไฟฟ้าตกที่มากเกินไปจะลดแรงบิดที่มีอยู่และอาจทําให้เกิดความผิดพลาดของแรงดันไฟต่ําของไดรฟ์ ศึกษาข้อมูลจําเพาะของผู้ผลิตไดรฟ์สําหรับความยาวสายเคเบิลสูงสุดและเกจสายไฟขั้นต่ํา
ติดตั้งเซอร์โวไดรฟ์ในกล่องหุ้มที่มีการควบคุมสภาพอากาศโดยมีการระบายอากาศที่เพียงพอหรือการระบายความร้อนแบบบังคับ เซอร์โวไดรฟ์ส่วนใหญ่ได้รับการออกแบบมาสําหรับอุณหภูมิแวดล้อมสูงถึง 40-45°C การทํางานที่สูงกว่าช่วงนี้จะทําให้เกิดการลดความร้อนหรือการปิดระบบป้องกัน
การจัดการความร้อน
เซอร์โวมอเตอร์สร้างความร้อนระหว่างการทํางาน และอุณหภูมิที่มากเกินไปจะทําให้อายุการใช้งานของฉนวนที่คดเคี้ยวและอายุการใช้งานของจาระบีแบริ่งสั้นลง เซอร์โวมอเตอร์อุตสาหกรรมส่วนใหญ่มีฉนวนคลาส F (155°C) หรือคลาส H (180°C) แต่ควรทํางานต่ํากว่าขีดจํากัดเหล่านี้เพื่ออายุการใช้งานที่ยาวนาน
รอบการทํางานมีผลต่อการโหลดความร้อน มอเตอร์ที่สามารถส่งกําลัง 10 นิวตันเมตรได้อย่างต่อเนื่องอาจรองรับแรงบิดสูงสุด 20 นิวตันเมตรในช่วงเวลาสั้น ๆ คํานวณแรงบิด RMS สําหรับรอบการทํางานของคุณและตรวจสอบว่ายังคงต่ํากว่าพิกัดต่อเนื่องของมอเตอร์ เซอร์โวไดรฟ์จํานวนมากมีรุ่นระบายความร้อนที่ตรวจสอบอุณหภูมิมอเตอร์และป้องกันความร้อนสูงเกินไป
สําหรับการใช้งานที่มีอุณหภูมิแวดล้อมสูงหรือรอบการทํางานสูงอย่างต่อเนื่อง ให้พิจารณามอเตอร์ที่มีการระบายความร้อนแบบบังคับ (พัดลมภายนอก) หรือการระบายความร้อนด้วยของเหลว
ข้อผิดพลาดในการออกแบบทั่วไป
การเพิกเฉยต่ออัตราส่วนความเฉื่อยระหว่างการเลือกมอเตอร์นําไปสู่ความยากลําบากในการปรับแต่งและการตอบสนองที่เฉื่อยชา คํานวณความเฉื่อยของโหลดเสมอและตรวจสอบว่าอัตราส่วนความเฉื่อยอยู่ในช่วงที่ยอมรับได้ซึ่งควรต่ํากว่า 5:1 สําหรับการใช้งานที่มีความต้องการสูง
การไม่คํานึงถึงความเฉื่อยที่สะท้อนผ่านเกียร์หรือสกรูอาจส่งผลให้มอเตอร์มีขนาดเล็กลง มวลเชิงเส้น 10 กก. บนบอลสกรู 5 มม./รอบ สะท้อนถึงประมาณ 0.00006 กก.·ตร.ม. ที่เพลามอเตอร์ ซึ่งอาจดูเล็ก แต่จะเพิ่มขึ้นอย่างรวดเร็วด้วยหลายแกนหรือมวลที่ใหญ่กว่า
การระบุแรงบิดสูงสุดโดยไม่ตรวจสอบเส้นโค้งความเร็ว-แรงบิดเป็นข้อผิดพลาดที่พบบ่อยอีกประการหนึ่ง มอเตอร์อาจให้แรงบิดสูงสุด 20 นิวตันเมตร แต่ที่ความเร็วต่ําเท่านั้น ที่ 3000 รอบต่อนาที แรงบิดที่มีอยู่อาจลดลงเหลือ 8 นิวตันเมตร ตรวจสอบเสมอว่ามีแรงบิดที่ต้องการที่ความเร็วในการทํางานสูงสุด
การละเลยขีดจํากัดความยาวของสายเคเบิลอาจทําให้การป้อนกลับของตัวเข้ารหัสเสียหายหรือทําให้เกิดปัญหาแรงดันไฟฟ้าตก ปฏิบัติตามข้อกําหนดของผู้ผลิตไดรฟ์สําหรับความยาวสายมอเตอร์สูงสุด โดยทั่วไป 25-50 เมตรสําหรับไดรฟ์มาตรฐาน
6. ข้อควรพิจารณาเกี่ยวกับห่วงโซ่อุปทานและการจัดหา
นอกเหนือจากข้อกําหนดทางเทคนิคแล้วปัจจัยการจัดหาในทางปฏิบัติจะส่งผลต่อไทม์ไลน์ของโครงการต้นทุนและการสนับสนุนในระยะยาว วิศวกรและทีมจัดซื้อควรประเมินปัจจัยเหล่านี้ตั้งแต่เนิ่นๆ ในกระบวนการคัดเลือก
ระยะเวลารอคอยสินค้าและความพร้อมใช้งาน
เซอร์โวมอเตอร์มาตรฐานจากผู้ผลิตรายใหญ่ (Siemens, Yaskawa, Mitsubishi, Kollmorgen, Fanuc) โดยทั่วไปจะมีระยะเวลารอคอยสินค้า 4-12 สัปดาห์ขึ้นอยู่กับขนาดและการกําหนดค่า มอเตอร์แบบกําหนดเองที่มีขดลวดพิเศษ การกําหนดค่าการติดตั้ง หรือประเภทตัวเข้ารหัสสามารถยืดระยะเวลารอคอยสินค้าได้ถึง 16-20 สัปดาห์
ในช่วงที่ห่วงโซ่อุปทานหยุดชะงักหรือช่วงที่มีความต้องการสูง ระยะเวลารอคอยสินค้าอาจขยายออกไปอย่างมาก สําหรับโครงการที่สําคัญ ให้พิจารณาการจัดหาแบบคู่จากผู้ผลิตหลายรายหรือรักษาสินค้าคงคลังเชิงกลยุทธ์ของส่วนประกอบที่มีโอกาสในการขายระยะยาว
ผู้จัดจําหน่ายหลายราย (Digi-Key, Mouser, Allied Electronics) สต็อกเซอร์โวมอเตอร์รุ่นยอดนิยมสําหรับการจัดส่งทันที แม้ว่าการเลือกจะมีจํากัดเมื่อเทียบกับการสั่งซื้อโดยตรงจากผู้ผลิต สําหรับการสร้างต้นแบบและการพัฒนาสต็อกผู้จัดจําหน่ายจะเร่งกําหนดการ
การรับรองและการปฏิบัติตามข้อกําหนด
เซอร์โวมอเตอร์อุตสาหกรรมมักมีเครื่องหมาย CE สําหรับตลาดยุโรปและการยอมรับ UL สําหรับตลาดอเมริกาเหนือ สําหรับการใช้งานเฉพาะทาง ให้ตรวจสอบการรับรองเพิ่มเติม:
- AEC-Q200 หรือเทียบเท่าสําหรับการใช้งานยานยนต์ที่ต้องการช่วงอุณหภูมิที่เพิ่มขึ้นและทนต่อการสั่นสะเทือน
- IEC 60601 สําหรับการใช้งานอุปกรณ์ทางการแพทย์
- ATEX หรือ IECEx สําหรับสภาพแวดล้อมในบรรยากาศที่ระเบิดได้
- ระดับ IP (IP54, IP65, IP67) สําหรับการติดตั้งแบบชะล้างหรือภายนอกอาคาร
การรับรองที่ขาดหายไปอาจทําให้การเปิดตัวผลิตภัณฑ์ล่าช้าหรือป้องกันการเข้าสู่ตลาด ตรวจสอบข้อกําหนดการรับรองตั้งแต่เนิ่นๆ และเลือกมอเตอร์ที่ได้รับการอนุมัติที่เหมาะสม
ต้นทุนรวมในการเป็นเจ้าของ
ต้นทุนมอเตอร์เริ่มต้นเป็นเพียงส่วนหนึ่งของสมการต้นทุนทั้งหมด พิจารณา:
- ต้นทุนไดรฟ์: มอเตอร์สมรรถนะสูงอาจต้องใช้ไดรฟ์ที่มีราคาแพงกว่าพร้อมคุณสมบัติขั้นสูง
- ต้นทุนพลังงาน: มอเตอร์ที่มีประสิทธิภาพมากขึ้นช่วยลดต้นทุนการดําเนินงานตลอดอายุการใช้งานของอุปกรณ์
- ค่าบํารุงรักษา: เซอร์โวมอเตอร์ไร้แปรงถ่านต้องการการบํารุงรักษาน้อยที่สุดเมื่อเทียบกับมอเตอร์กระแสตรงแบบมีแปรงถ่าน
- ความพร้อมของชิ้นส่วนอะไหล่: มอเตอร์จากผู้ผลิตรายใหญ่มีการสนับสนุนชิ้นส่วนในระยะยาวที่ดีกว่า
สําหรับการสร้างอุปกรณ์ปริมาณมาก ให้เจรจาราคาตามปริมาณและพิจารณากําหนดมาตรฐานในตระกูลมอเตอร์เดียวเพื่อลดความซับซ้อนของสินค้าคงคลังและปรับปรุงความคุ้นเคยของช่างเทคนิค
| ปัจจัยการจัดหา | ตัวเลือกต้นทุนต่ํา ตัวเลือกประสิทธิภาพสูง |
|---|---|
| ระยะเวลารอคอย | 4-8 สัปดาห์ (รุ่นมาตรฐาน) |
| ห้องว่าง | มีสต็อกตัวแทนจําหน่าย สั่งทํา |
| การรับรอง | CE, UL พื้นฐาน |
| ระดับ IP | IP54 (อุตสาหกรรมมาตรฐาน) |
| ช่วงราคา (ตัวอย่าง 1 นิวตันเมตร) | $200-400 |
| ประสิทธิภาพการใช้พลังงาน | Synology Inc. 80-85% ทั่วไป |
| ประเภทตัวเข้ารหัส | ส่วนเพิ่ม (ต้นทุนที่ต่ํากว่า) |
สําหรับผลิตภัณฑ์เชิงพาณิชย์ ให้สร้างสมดุลระหว่างต้นทุนเริ่มต้นกับข้อกําหนดด้านประสิทธิภาพและต้นทุนรวมในการเป็นเจ้าของ สําหรับแอปพลิเคชันที่สําคัญ ให้จัดลําดับความสําคัญของความน่าเชื่อถือ การสนับสนุน และความพร้อมใช้งานในระยะยาวมากกว่าราคาซื้อที่ต่ําที่สุด
7. คําถามที่พบบ่อย
เซอร์โวมอเตอร์ AC และเซอร์โวมอเตอร์ DC ต่างกันอย่างไร
เซอร์โวมอเตอร์ไฟฟ้ากระแสสลับใช้ไฟ AC สามเฟส และโดยทั่วไปจะใช้การออกแบบซิงโครนัสแม่เหล็กถาวร (PMSM) หรือ DC แบบไม่มีแปรงถ่าน (BLDC) ประสิทธิภาพการระบายความร้อนที่ดีขึ้นและการทํางานที่ไม่ต้องบํารุงรักษาเนื่องจากไม่มีแปรง เซอร์โวมอเตอร์กระแสตรงใช้การออกแบบ DC แบบมีแปรงถ่านหรือแบบไม่มีแปรงถ่าน และควบคุมได้ง่ายกว่า แต่ต้องเปลี่ยนแปรงเป็นระยะในรุ่นที่มีแปรงถ่าน สําหรับการออกแบบอุตสาหกรรมใหม่ เซอร์โวมอเตอร์ AC เป็นตัวเลือกมาตรฐาน
ฉันจะคํานวณแรงบิดของเซอร์โวมอเตอร์ที่ต้องการสําหรับการใช้งานบอลสกรูได้อย่างไร
คํานวณแรงบิดรวมเป็นผลรวมของแรงบิดเร่งแรงบิดแรงเสียดทานและแรงบิดโน้มถ่วง (สําหรับแกนแนวตั้ง) แรงบิดในการเร่งความเร็วคือ T = J_total × α แรงบิดแรงเสียดทานสําหรับบอลสกรูอยู่ที่ประมาณ 5-10% ของแรงโน้มถ่วง แรงบิดโน้มถ่วงสําหรับการเคลื่อนที่ในแนวตั้งคือ T = m × g × (ตะกั่ว/2π) สะท้อนแรงเชิงเส้นและมวลทั้งหมดไปยังเพลามอเตอร์โดยใช้สายสกรู จากนั้นเพิ่มปัจจัยด้านความปลอดภัย 20-50%
ฉันควรกําหนดเป้าหมายอัตราส่วนความเฉื่อยเท่าใดเมื่อเลือกเซอร์โวมอเตอร์
แนวทางการออกแบบแบบดั้งเดิมแนะนําอัตราส่วนความเฉื่อยระหว่าง 1:1 และ 10:1 โดยอัตราส่วนที่ต่ํากว่าจะให้การตอบสนองแบบไดนามิกที่ดีขึ้นและการปรับแต่งที่ง่ายขึ้น เซอร์โวไดรฟ์สมัยใหม่ที่มีการปรับแต่งแบบปรับได้สามารถรองรับอัตราส่วนได้ถึง 30:1 หรือสูงกว่า แต่การปรับแต่งจะท้าทายมากขึ้นและการตอบสนองของระบบลดลง สําหรับการใช้งานที่ต้องการการเร่งความเร็วอย่างรวดเร็วและการวางตําแหน่งที่แม่นยํา ให้อัตราส่วนเป้าหมายต่ํากว่า 5:1
ฉันสามารถใช้เซอร์โวมอเตอร์ในสภาพแวดล้อมสูญญากาศหรือห้องปลอดเชื้อได้หรือไม่
เซอร์โวมอเตอร์มาตรฐานใช้ตลับลูกปืนที่หล่อลื่นด้วยจาระบีซึ่งปล่อยก๊าซออกในสุญญากาศและอาจมีอนุภาคที่ไม่เหมาะสําหรับห้องปลอดเชื้อ สําหรับการใช้งานสูญญากาศ ให้ระบุมอเตอร์ที่มีตลับลูกปืนหล่อลื่นแบบแห้งหรือตลับลูกปืนแม่เหล็ก สําหรับห้องปลอดเชื้อ ให้เลือกมอเตอร์ที่มีตัวเรือนที่ปิดสนิท (IP65 หรือสูงกว่า) และวัสดุที่เข้ากันได้กับห้องปลอดเชื้อ ผู้ผลิตบางรายเสนอมอเตอร์พิเศษที่ออกแบบมาโดยเฉพาะสําหรับสภาพแวดล้อมเหล่านี้
โดยทั่วไปเซอร์โวมอเตอร์จะมีอายุการใช้งานนานแค่ไหน?
อายุการใช้งานของเซอร์โวมอเตอร์ถูกจํากัดโดยอายุการใช้งานของแบริ่งและการเสื่อมสภาพของฉนวนที่คดเคี้ยวเป็นหลัก ภายใต้สภาวะการทํางานปกติ (การโหลดที่เหมาะสมอุณหภูมิแวดล้อมที่เหมาะสมสภาพแวดล้อมที่สะอาด) อายุการใช้งานของตลับลูกปืนเซอร์โวมอเตอร์โดยทั่วไปจะอยู่ที่ 20,000 ถึง 30,000 ชั่วโมงการทํางาน อายุการใช้งานของฉนวนที่คดเคี้ยวขึ้นอยู่กับอุณหภูมิในการทํางาน มอเตอร์ทํางานที่อุณหภูมิที่กําหนดอาจอยู่ได้นาน 40,000+ ชั่วโมง การทํางานที่ต่ํากว่าอุณหภูมิที่กําหนดจะช่วยยืดอายุฉนวนอย่างมีนัยสําคัญตามสมการ Arrhenius
ความหมายของค่าคงที่มอเตอร์ (Kt) และค่าคงที่แรงดันไฟฟ้า (Ke) คืออะไร?
ค่าคงที่ของแรงบิด (Kt) กําหนดความสัมพันธ์ระหว่างกระแสมอเตอร์และแรงบิดเอาต์พุต: T = Kt × I มอเตอร์ Kt ที่สูงขึ้นจะสร้างแรงบิดต่อแอมป์ได้มากขึ้นปรับปรุงประสิทธิภาพ แต่โดยทั่วไปแล้วจะแลกกับความเร็วสูงสุดที่ต่ํากว่า ค่าคงที่แรงดันไฟฟ้า (Ke) กําหนด back-EMF ที่สร้างขึ้นต่อหน่วยความเร็ว: V = Ke × ω ค่าคงที่เหล่านี้สัมพันธ์กันโดย Kt = Ke ในหน่วยที่สอดคล้องกัน และแสดงถึงลักษณะการออกแบบมอเตอร์พื้นฐานที่ส่งผลต่อประสิทธิภาพตลอดช่วงการทํางาน
ฉันควรเลือกตัวเข้ารหัสแบบเพิ่มหน่วยหรือแบบสัมบูรณ์?
ตัวเข้ารหัสที่เพิ่มขึ้นจะวัดการเปลี่ยนแปลงตําแหน่งสัมพัทธ์และต้องมีการกลับบ้านหลังจากรอบพลังงานแต่ละรอบเพื่อสร้างการอ้างอิงตําแหน่ง มีค่าใช้จ่ายน้อยกว่าและเพียงพอสําหรับการใช้งานที่ยอมรับการกลับบ้าน ตัวเข้ารหัสแบบสัมบูรณ์จะรายงานตําแหน่งโดยตรงหลังจากเปิดเครื่องโดยไม่ต้องกลับบ้าน ซึ่งไม่จําเป็นต้องใช้ลิมิตสวิตช์และรูทีนการกลับบ้าน มีค่าใช้จ่ายสูงกว่า แต่ลดเวลาเริ่มต้นและป้องกันการขัดข้อง สําหรับการใช้งานแบบหลายรอบ ให้เลือกตัวเข้ารหัสแบบสัมบูรณ์แบบหลายรอบที่ติดตามตําแหน่งในการหมุนเพลาหลายรอบ
ฉันจะแก้ไขปัญหาเซอร์โวมอเตอร์ร้อนเกินไปได้อย่างไร
ขั้นแรกให้ตรวจสอบว่าแรงบิด RMS ที่คํานวณได้ยังคงต่ํากว่าพิกัดต่อเนื่องของมอเตอร์ ตรวจสอบการยึดเกาะทางกล แรงเสียดทานมากเกินไป หรือการเยื้องศูนย์ที่บังคับให้มอเตอร์ทํางานหนักกว่าที่คาดไว้ ตรวจสอบการระบายอากาศที่เพียงพอรอบๆ มอเตอร์ และตรวจดูให้แน่ใจว่าอุณหภูมิแวดล้อมยังคงอยู่ในข้อกําหนด ตรวจสอบพารามิเตอร์การปรับแต่งไดรฟ์—อัตราขยายอินทิกรัลที่มากเกินไปอาจทําให้เกิดกระแสไฟฟ้าไหลต่อเนื่องแม้ว่ามอเตอร์จะหยุดนิ่งก็ตาม วัดกระแสมอเตอร์จริงระหว่างการทํางานเพื่อตรวจสอบว่าตรงกับความคาดหวัง
8. สรุป
การเลือกเซอร์โวมอเตอร์ไม่ใช่วิทยาศาสตร์จรวด แต่คุณต้องจับคู่แรงบิด ความเร็ว ความเฉื่อย และความละเอียดป้อนกลับกับสิ่งที่เครื่องของคุณทําจริง หากคุณต้องการความเร็วสูง การเร่งความเร็วที่รวดเร็ว และการวางตําแหน่งที่แม่นยําภายใต้ภาระที่เปลี่ยนแปลง เซอร์โวก็คุ้มค่ากับค่าใช้จ่ายเพิ่มเติม สําหรับงานที่ง่ายกว่า ช้ากว่า และโหลดได้มั่นคง สเต็ปเปอร์สามารถทํางานได้ด้วยเงินที่น้อยลง
ก่อนที่คุณจะซื้อ ให้เรียกใช้ตัวเลข: แรงบิดตลอดทั้งรอบ แรงบิดที่ความเร็วสูงสุด อัตราส่วนความเฉื่อย และความละเอียดของตัวเข้ารหัส อย่าลืมกับดักทั่วไป เช่น การเพิกเฉยต่อเส้นโค้งความเร็ว-แรงบิด ลืมความเฉื่อยที่สะท้อนกลับ หรือการประเมินขีดจํากัดความยาวของสายเคเบิลต่ําเกินไป สําหรับโครงการที่สําคัญ ให้วิศวกรแอปของผู้จําหน่ายยานยนต์มีส่วนร่วมตั้งแต่เนิ่นๆ พวกเขาจะตรวจสอบคณิตศาสตร์ของคุณ แนะนําขนาดเฟรมที่เหมาะสม และตั้งค่าสถานะการรวมก่อนที่พวกเขาจะกัดคุณ คว้าแผ่นข้อมูลและบันทึกย่อของแอป และถ้าทําได้ ให้ทดสอบด้วยชุดประเมินก่อนที่จะตัดสินใจใช้ปริมาณ
พร้อมที่จะเลือกมอเตอร์แล้วหรือยัง? ใช้ขั้นตอนการคํานวณที่เรากล่าวถึง เปรียบเทียบแบรนด์สองสามยี่ห้อ และขอให้ผู้ขายของคุณตรวจสอบตัวเลือกของคุณ ช่วยลดอาการปวดหัวไปตามท้องถนน