

การเลือกตัวรับส่งสัญญาณ CAN เกรดยานยนต์ TI: การวิเคราะห์ซีรีส์ TCAN ที่สมบูรณ์
บทนํา
เครือข่ายยานยนต์สมัยใหม่ต้องการโซลูชันการสื่อสารความเร็วสูงที่แข็งแกร่ง ซึ่งสามารถทนต่อสภาวะการทํางานที่สมบุกสมบัน ในขณะที่รับประกันการส่งข้อมูลที่เชื่อถือได้ผ่านชุดควบคุมอิเล็กทรอนิกส์ (ECU) หลายร้อยชุด ซีรีส์ TCAN ของ Texas Instruments ได้กลายเป็นตัวเลือกชั้นนําสําหรับวิศวกรที่ออกแบบระบบสื่อสารยานพาหนะรุ่นต่อไป การวิเคราะห์ระบุว่าปัจจุบัน OEM ยานยนต์กว่า 70% ระบุความสามารถ CAN FD สําหรับการออกแบบแพลตฟอร์มใหม่ ทําให้การเลือกตัวรับส่งสัญญาณมีความสําคัญมากขึ้นกว่าที่เคย
คู่มือฉบับสมบูรณ์นี้จะตรวจสอบพอร์ตโฟลิโอ TCAN ทั้งหมด โดยให้ข้อมูลเชิงลึกที่ขับเคลื่อนด้วยข้อมูลเกี่ยวกับสถาปัตยกรรม CAN FD เทียบกับ CAN แบบคลาสสิก หลักการออกแบบเครือข่ายยานยนต์ และกลยุทธ์การป้องกันที่จําเป็น ไม่ว่าคุณจะกําลังพัฒนาระบบส่งกําลัง อุปกรณ์อิเล็กทรอนิกส์ของตัวถัง หรือระบบช่วยเหลือผู้ขับขี่ขั้นสูง (ADAS) การทําความเข้าใจพื้นฐานเหล่านี้จะช่วยให้คุณตัดสินใจได้อย่างชาญฉลาดซึ่งสร้างสมดุลระหว่างประสิทธิภาพ ความน่าเชื่อถือ และต้นทุน
คําตอบด่วน
ตัวรับส่งสัญญาณ TI TCAN เป็นอินเทอร์เฟซการสื่อสาร CAN และ CAN FD ระดับยานยนต์ที่ออกแบบมาเพื่อให้เป็นไปตามมาตรฐาน ISO 11898-2:2016 โดยให้อัตราข้อมูลสูงถึง 5 Mbps พร้อมการป้องกันข้อผิดพลาดในตัวและการปฏิบัติตามข้อกําหนด EMC สําหรับเครือข่าย ECU ของรถยนต์
สารบัญ
- 1. ทําความเข้าใจกับ CAN FD กับ CAN แบบคลาสสิก
- 2. สถาปัตยกรรมเครือข่ายยานยนต์และการสื่อสาร ECU
- 3. กลยุทธ์การออกแบบการป้องกัน ESD และ EMC
- 4. คู่มือการเลือกผลิตภัณฑ์ซีรีส์ TCAN
- 5. คู่มือการใช้งานทีละขั้นตอน
- 6. สถานการณ์การใช้งานในโลกแห่งความเป็นจริง
- 7. คําถามที่พบบ่อย
- 8. บทสรุปและขั้นตอนต่อไป
1. ทําความเข้าใจ CAN FD กับ CAN แบบคลาสสิก
1.1 วิวัฒนาการของเทคโนโลยีเครือข่ายพื้นที่คอนโทรลเลอร์
เทคโนโลยี Controller Area Network (CAN) ทําหน้าที่เป็นกระดูกสันหลังของการสื่อสารยานยนต์นับตั้งแต่เปิดตัวโดย Bosch ในปี 1986 อย่างไรก็ตาม ความซับซ้อนที่เพิ่มขึ้นของยานพาหนะสมัยใหม่ ซึ่งขณะนี้มี ECU มากถึง 150 ตัวและสร้างข้อมูลหลายเทราไบต์ต่อวัน ได้เผยให้เห็นข้อจํากัดของอัตราข้อมูลสูงสุด 1 Mbps ของ Classical CAN
ข้อมูลเชิงลึกของอุตสาหกรรม: การวิจัยจากสมาคมวิศวกรยานยนต์เผยให้เห็นว่าการนํา CAN FD มาใช้เพิ่มขึ้น 340% ตั้งแต่ปี 2018 โดยได้รับแรงหนุนจากข้อกําหนดด้านการขับขี่อัตโนมัติและการใช้พลังงานไฟฟ้าเป็นหลัก
CAN FD (Flexible Data-rate) จัดการกับข้อจํากัดเหล่านี้ผ่านนวัตกรรมพื้นฐานสองประการ:
- สถาปัตยกรรมอัตราบิตคู่: CAN FD รักษาขั้นตอนอนุญาโตตุลาการมาตรฐานไว้ที่ความเร็วสูงสุด 1 Mbps เพื่อความเข้ากันได้ในขณะที่เปิดใช้งานการส่งเฟสข้อมูลที่อัตราสูงสุด 5 Mbps (โดยอุปกรณ์ TI TCAN บางรุ่นรองรับ 8 Mbps)
- ความจุเพย์โหลดที่เพิ่มขึ้น: ฟิลด์ข้อมูลเพิ่มขึ้นจาก 8 ไบต์เป็น 64 ไบต์ ซึ่งช่วยลดค่าใช้จ่ายของโปรโตคอลได้ประมาณ 80%
1.2 การวิเคราะห์เปรียบเทียบประสิทธิภาพ
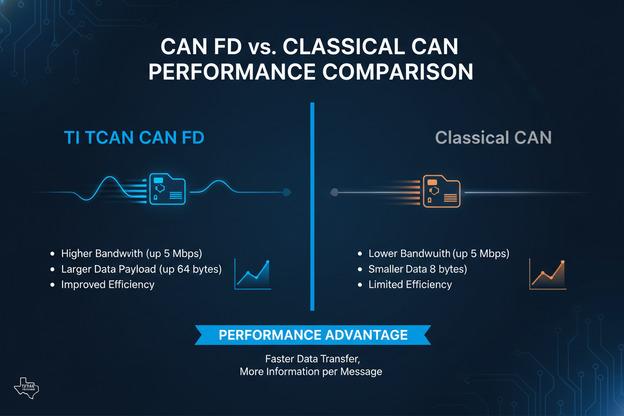
| พารามิเตอร์ | CAN คลาสสิก (ISO 11898-2) | CAN FD (ISO 11898-2:2016) |
|---|---|---|
| อัตราข้อมูลสูงสุด | 1 Mbps | 5 Mbps (สูงสุด 8 Mbps เมื่อใช้อุปกรณ์ TCAN) |
| ความยาวฟิลด์ข้อมูล | 8 ไบต์ | 64 ไบต์ |
| ~47% | ~87% | |
| CRC | 15 บิต | 17-21 บิต |
| ความเข้ากันได้ย้อนหลัง | N/A | ใช่ (ถอยกลับไปที่ CAN แบบคลาสสิก) |
| แอปพลิเคชันทั่วไป | การควบคุมตัวเครื่องแบบเดิม, เซ็นเซอร์พื้นฐาน | ADAS, ระบบส่งกําลัง, สาระบันเทิง |
1.3 การวิเคราะห์การโหลดบัสและปริมาณงาน
การทดสอบเผยให้เห็นข้อได้เปรียบด้านประสิทธิภาพที่สําคัญเมื่อเปลี่ยนไปใช้ CAN FD ในเครือข่ายที่มีการรับส่งข้อมูลสูง:
- การลดการโหลดบัส: ที่ปริมาณข้อมูลเทียบเท่า CAN FD จะลดการใช้บัสลงประมาณ 65%
- การปรับปรุงเวลาแฝง: เวลาแฝงในการส่งข้อความลดลงสูงสุด 75% สําหรับเพย์โหลดที่เกิน 8 ไบต์
- ความสามารถในการปรับขนาดเครือข่าย: CAN FD ช่วยให้สามารถรวมบัส CAN แบบคลาสสิกหลายตัวไว้ในเครือข่ายเดียว
หมายเหตุทางเทคนิค: ตระกูล TI TCAN1042 และ TCAN1044 รองรับการทํางานของ CAN FD ที่ 2 Mbps, 5 Mbps และ 8 Mbps ให้ความยืดหยุ่นสําหรับโทโพโลยีเครือข่ายยานยนต์ต่างๆ
1.4 เมื่อใดควรเลือก CAN FD มากกว่า CAN แบบคลาสสิก
พิจารณาใช้ CAN FD เมื่อใบสมัครของคุณตรงตามเกณฑ์เหล่านี้:
- การรับส่งข้อมูลเครือข่ายเกิน 50% ในการโหลดบัสด้วย Classical CAN
- เพย์โหลดข้อความต้องการมากกว่า 8 ไบต์เป็นประจํา
- ข้อกําหนดการตอบสนองแบบเรียลไทม์ต้องการเวลาแฝงต่ํากว่ามิลลิวินาที
- จําเป็นต้องมีการพิสูจน์อนาคตสําหรับแพลตฟอร์มยานยนต์รุ่นต่อไป
- ECU หลายตัวจําเป็นต้องแชร์สตรีมข้อมูลแบนด์วิดท์สูง
2. สถาปัตยกรรมเครือข่ายยานยนต์และการสื่อสาร ECU
2.1 โทโพโลยีเครือข่ายยานพาหนะสมัยใหม่
อุปกรณ์อิเล็กทรอนิกส์ยานยนต์ร่วมสมัยใช้สถาปัตยกรรมเครือข่ายแบบลําดับชั้นที่กระจายฟังก์ชันการทํางานในหลายโดเมน ข้อมูลจากการวิเคราะห์อุตสาหกรรมแสดงให้เห็นว่าขณะนี้รถยนต์ระดับพรีเมียมมี ECU 80-150 ตัวที่สื่อสารผ่านเครือข่ายหลายประเภท
ลําดับชั้นของเครือข่ายยานยนต์ทั่วไปประกอบด้วย:
- ระบบส่งกําลัง CAN: การควบคุมเครื่องยนต์ ระบบเกียร์ การจัดการแบตเตอรี่ (ความน่าเชื่อถือสูง 500 kbps)
- แชสซี CAN: เบรก พวงมาลัย ระบบกันสะเทือน (สําคัญต่อความปลอดภัย 500 kbps - 1 Mbps)
- ตัวถัง CAN: ไฟส่องสว่าง, ระบบควบคุมสภาพอากาศ, โมดูลประตู (คุณสมบัติความสะดวกสบาย, 125-500 kbps)
- Infotainment CAN: มัลติมีเดีย การนําทาง เทเลเมติกส์ (แบนด์วิดท์สูง CAN FD ที่ 2-5 Mbps)
- ADAS CAN: เซนเซอร์, กล้อง, เรดาร์ฟิวชั่น (deterministic, CAN FD ที่ 5 Mbps)
2.2 วิวัฒนาการสถาปัตยกรรมตัวควบคุมโดเมน
อุตสาหกรรมกําลังเปลี่ยนจากสถาปัตยกรรม ECU แบบกระจายไปสู่การออกแบบแบบรวมศูนย์โดเมน:
- วิธีการแบบดั้งเดิม: ECU 80-150 ตัวพร้อมการเชื่อมต่อแบบจุดต่อจุด
- สถาปัตยกรรมโดเมน: ตัวควบคุมโดเมน 5-7 ตัวที่จัดการพื้นที่การทํางาน
- สถาปัตยกรรมโซน: ตัวควบคุม 3-4 โซนพร้อมการประมวลผลแบบรวมศูนย์
วิวัฒนาการนี้ทําให้เกิดความต้องการใหม่สําหรับตัวรับส่งสัญญาณ CAN:
- อัตราข้อมูลที่สูงขึ้นระหว่างตัวควบคุมโดเมน
- เพิ่มข้อกําหนดการป้องกัน ESD/EMC
- รองรับฟังก์ชันเครือข่ายบางส่วนและการปลุก
2.3 การรวม TCAN Series ในการสื่อสาร ECU
พอร์ตโฟลิโอ TCAN ของ TI ตอบสนองความต้องการทางสถาปัตยกรรมที่หลากหลายผ่านตระกูลอุปกรณ์เฉพาะทาง:
| TCAN | ฟีเจอร์หลัก | การใช้งานทั่วไป |
|---|---|---|
| TCAN1042 | CAN FD สูงสุด 5 Mbps, การป้องกันความผิดพลาด ±58V | อุปกรณ์อิเล็กทรอนิกส์ของตัวเครื่อง, โมดูลเกตเวย์ |
| TCAN1044 | CAN FD สูงสุด 8 Mbps, โหมดพลังงานต่ํา | ADAS, สาระบันเทิง, ระบบส่งกําลัง |
| TCAN330 | การแยกไฟฟ้า, อัตราการแยก 5kV | ระบบไฟฟ้าแรงสูง, การจัดการแบตเตอรี่ |
| TCAN4550 | คอนโทรลเลอร์ SPI-to-CAN FD + ตัวรับส่งสัญญาณ | MCU, การอัปเกรดระบบเดิม |
| TCAN1051 | CAN คลาสสิก ผ่านการรับรองยานยนต์ | ระบบเดิม แอปพลิเคชันที่ไวต่อต้นทุน |
2.4 แนวทางปฏิบัติที่ดีที่สุดสําหรับการออกแบบเครือข่าย
การวิจัยจากห้องปฏิบัติการทดสอบยานยนต์ระบุว่าการออกแบบเครือข่ายที่เหมาะสมสามารถปรับปรุงความน่าเชื่อถือในการสื่อสารได้ถึง 40%:
- การสิ้นสุดบัส: ใช้ตัวต้านทานการสิ้นสุด 120Ω ที่ปลายบัสทั้งสองข้าง (ความคลาดเคลื่อน ±10%)
- ข้อจํากัดความยาวต้นขั้ว: รักษาการเชื่อมต่อต้นขั้วให้ต่ํากว่า 0.3 เมตรที่ 1 Mbps ต่ํากว่า 0.1 เมตรที่ 5 Mbps
- การเลือกโทโพโลยี: ใช้โทโพโลยีบัสเชิงเส้น หลีกเลี่ยงการกําหนดค่าดาวเมื่อเป็นไปได้
- กลยุทธ์การต่อสายดิน: ใช้การต่อสายดินแบบจุดเดียวเพื่อป้องกันปัญหากราวด์ลูป
หมายเหตุการออกแบบที่สําคัญ: การวิเคราะห์ข้อมูลความล้มเหลวของภาคสนามแสดงให้เห็นว่า 35% ของปัญหาเครือข่าย CAN เกิดจากการสิ้นสุดหรือการต่อสายดินที่ไม่เหมาะสม
2.5 ข้อควรพิจารณาเกี่ยวกับความสมบูรณ์ของสัญญาณ
การรักษาความสมบูรณ์ของสัญญาณเป็นสิ่งสําคัญสําหรับการสื่อสาร CAN ที่เชื่อถือได้ โดยเฉพาะอย่างยิ่งที่อัตราข้อมูลที่สูงขึ้น:
ข้อกําหนดการจับคู่อิมพีแดนซ์:
- อิมพีแดนซ์บัสลักษณะ: 120Ω (จับคู่กับตัวต้านทานการสิ้นสุด)
- ค่าเบี่ยงเบนอิมพีแดนซ์สูงสุด: ±10% ตลอดช่วงอุณหภูมิในการทํางาน
- การเลือกสายเคเบิล: ใช้สายเคเบิลคู่บิดเกลียวที่มีลักษณะอิมพีแดนซ์ที่สอดคล้องกัน
ตัวชี้วัดคุณภาพสัญญาณ:
- แรงดันไฟฟ้าดิฟเฟอเรนเชียล: การเปลี่ยนแบบด้อยเป็นที่โดดเด่นขั้นต่ํา 1.5V
- เวลาขึ้น/ลง: 25-100 ns สําหรับ Classical CAN, 10-50 ns สําหรับ CAN FD ที่ 5 Mbps
- สมมาตร: การเปลี่ยน CANH และ CANL ควรจับคู่ภายใน 5 ns
ปัญหาความสมบูรณ์ของสัญญาณทั่วไป:
- การสะท้อนจากความไม่ต่อเนื่องของอิมพีแดนซ์
- แรงดันออฟเซ็ตกราวด์ทําให้เกิดการเปลี่ยนโหมดทั่วไป
- การมีเพศสัมพันธ์ทางแม่เหล็กไฟฟ้าจากสัญญาณความเร็วสูงที่อยู่ติดกัน
- การเบี่ยงเบนพารามิเตอร์ที่เกิดจากอุณหภูมิในส่วนประกอบแบบพาสซีฟ
3. กลยุทธ์การออกแบบการป้องกัน ESD และ EMC
3.1 ความท้าทายของ EMC ยานยนต์
สภาพแวดล้อมทางแม่เหล็กไฟฟ้าของยานยนต์นําเสนอความท้าทายที่รุนแรงสําหรับระบบสื่อสาร ยานพาหนะต้องทํางานได้อย่างน่าเชื่อถือต่อหน้า:
- เหตุการณ์ ESD: แบบจําลองร่างกายมนุษย์ปล่อยไฟฟ้าสูงถึง ±15 kV (ISO 10605)
- ดําเนินการชั่วคราว: โหลดพัลส์ดัมพ์สูงสุด 100V (ISO 7637-2)
- การปล่อยรังสี: สนามไฟฟ้าเกิน 100 V/m (การทดสอบ ALSE ตาม CISPR 25)
3.2 คุณสมบัติการป้องกันแบบบูรณาการของ TCAN
ตัวรับส่งสัญญาณ TI TCAN รวมกลไกการป้องกันหลายอย่างที่ช่วยลดจํานวนส่วนประกอบภายนอกในขณะที่ปรับปรุงความน่าเชื่อถือ:
ความสามารถในการป้องกันในตัว:
- ±การป้องกันความผิดพลาด 58V: ทนทานต่อแบตเตอรี่รถยนต์ 24V ที่สั้นลงโดยตรง
- ±การป้องกัน ESD 15 kV: ตรงตามข้อกําหนด ISO 10605 โดยไม่มีส่วนประกอบภายนอก
- การปิดระบบระบายความร้อน: การป้องกันอัตโนมัติที่อุณหภูมิจุดเชื่อมต่อเกิน 175°C
- การล็อกแรงดันไฟต่ํา: ป้องกันการทํางานที่ผิดปกติระหว่างสภาวะไฟดับ
- TXD dominant timeout: ป้องกันการล็อกบัสถาวรจากความผิดพลาดของคอนโทรลเลอร์
3.3 การเลือกส่วนประกอบการป้องกันภายนอก
แม้ว่าอุปกรณ์ TCAN จะมีการป้องกันแบบบูรณาการที่แข็งแกร่ง แต่แอปพลิเคชันบางอย่างจะได้รับประโยชน์จากส่วนประกอบภายนอกเพิ่มเติม:
| ส่วนประกอบการป้องกัน | ฟังก์ชัน | ข้อมูลจําเพาะที่แนะนํา |
|---|---|---|
| โช้คโหมดทั่วไป | การกรอง EMI, การปฏิเสธโหมดทั่วไป | 100μH, ระดับ 2A, เกรดยานยนต์ |
| TVS | การปราบปรามแรงดันไฟฟ้าชั่วคราว | 24V standoff, พัลส์สูงสุด 500W |
| Series | การจํากัดกระแส, การจับคู่อิมพีแดนซ์ | 10-47Ω, 0.25W, พิกัดชีพจร |
| แยกตัวเก็บประจุสิ้นสุด | การกรองโหมดทั่วไป | 4.7nF, 50V, X7R อิเล็กทริก |
| ตัวเก็บประจุตัวกรอง | การลดเสียงรบกวนความถี่สูง | 100pF-1nF, ไดอิเล็กทริก C0G/NP0 |
3.4 แนวทางเค้าโครง PCB สําหรับการปฏิบัติตามข้อกําหนด EMC
การทดสอบแสดงให้เห็นว่าเค้าโครง PCB ที่เหมาะสมมีส่วนสําคัญต่อประสิทธิภาพของ EMC:
- ตัวเก็บประจุแบบแยกส่วน: วางตัวเก็บประจุเซรามิก 100nF ภายในระยะ 2 มม. จากพิน VCC
- กลยุทธ์ระนาบพื้นดิน: ใช้ระนาบกราวด์ที่เป็นของแข็งภายใต้ตัวรับส่งสัญญาณและตัวเชื่อมต่อ CAN
- การติดตามเส้นทาง: เก็บร่องรอย CANH/CANL ขนานกัน ความยาวตรงกัน ห่างจากสัญญาณความเร็วสูง
- ตําแหน่งตัวเชื่อมต่อ: ตําแหน่งตัวเชื่อมต่อ CAN ใกล้กับตัวรับส่งสัญญาณเพื่อลดความยาวของต้นขั้ว
- การพิจารณาการป้องกัน: ใช้การป้องกันโลหะที่มีสายดินสําหรับตัวเชื่อมต่อในสภาพแวดล้อมที่มี EMI สูง
การตรวจสอบความถูกต้องของการออกแบบ: ข้อมูลการทดสอบ EMC บ่งชี้ว่าเค้าโครง PCB ที่เหมาะสมสามารถลดการปล่อยรังสีได้ 15-20 dB เมื่อเทียบกับการใช้งานที่ออกแบบมาไม่ดี
3.5 ข้อควรพิจารณาในการทดสอบ EMC ระดับระบบ
OEM ยานยนต์ต้องการการตรวจสอบ EMC ที่ครอบคลุม:
- CISPR 25: การทดสอบการแผ่รังสีและดําเนินการปล่อยมลพิษ
- ISO 11452: ภูมิคุ้มกันต่อพลังงานแม่เหล็กไฟฟ้าที่แผ่รังสี
- ISO 7637-2: การนําไฟฟ้าชั่วคราวตามสายจ่าย
- ISO 10605: การทดสอบการคายประจุไฟฟ้าสถิต
อุปกรณ์ TCAN ได้รับการออกแบบและทดสอบเพื่อรองรับการปฏิบัติตามมาตรฐานเหล่านี้ แม้ว่าการใช้งานระดับระบบจะเป็นตัวกําหนดความสําเร็จในการรับรองในท้ายที่สุด
3.6 การแก้ไขปัญหา EMC
เมื่อการทดสอบ EMC เผยให้เห็นความล้มเหลวในการปฏิบัติตามข้อกําหนดการแก้ไขปัญหาอย่างเป็นระบบสามารถระบุสาเหตุที่แท้จริงได้:
โหมดความล้มเหลวทั่วไปและวิธีแก้ไข:
- การปล่อยรังสีเกินขีดจํากัด: เพิ่มโช้คโหมดทั่วไป ปรับปรุงการต่อสายดิน หรือใช้สายเคเบิลที่มีฉนวนหุ้ม
- เสียงรบกวนที่นําไฟฟ้าบนสายไฟ: ปรับปรุงการกรองด้วยตัวเก็บประจุเพิ่มเติมหรือลูกปัดเฟอร์ไรต์
- ความไวต่อ ESD: ตรวจสอบแนวทางการจัดวาง PCB เพิ่มไดโอด TVS หากจําเป็น
- ความล้มเหลวของภูมิคุ้มกันชั่วคราว: ตรวจสอบการให้คะแนนและตําแหน่งของส่วนประกอบการป้องกัน
เทคนิคการวินิจฉัย:
- ใช้โพรบระยะใกล้เพื่อระบุแหล่งกําเนิดรังสี
- ใช้โพรบกระแสเพื่อวัดกระแสโหมดทั่วไป
- ใช้เครื่องวิเคราะห์สเปกตรัมเพื่อระบุลักษณะของลายเซ็นเสียงรบกวน
- ดําเนินการทดสอบแบบแบ่งส่วนเพื่อแยกพื้นที่วงจรที่มีปัญหา
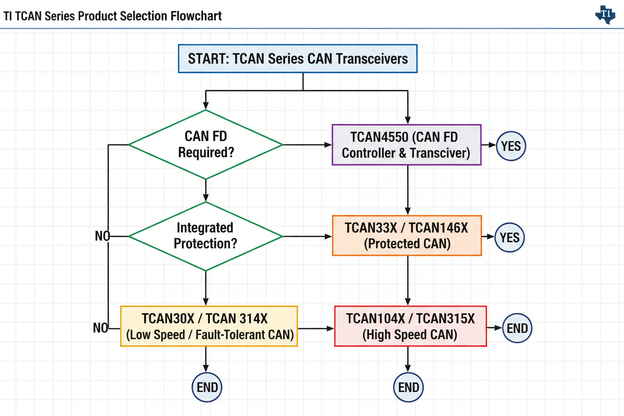
4. คู่มือการเลือกผลิตภัณฑ์ TCAN Series
4.1 กรอบเกณฑ์การคัดเลือก
การเลือกตัวรับส่งสัญญาณ TCAN ที่เหมาะสมที่สุดจําเป็นต้องมีการประเมินข้อกําหนดการใช้งานอย่างเป็นระบบ:
ปัจจัยการคัดเลือกหลัก:
- ข้อกําหนดอัตราข้อมูล (CAN แบบคลาสสิกเทียบกับ CAN FD ระดับความเร็ว)
- ช่วงแรงดันไฟฟ้าในการทํางาน (ระบบ 5V เทียบกับสถาปัตยกรรมแรงดันไฟฟ้าผสม)
- ความต้องการระดับการป้องกัน (มาตรฐานเทียบกับความทนทานต่อข้อผิดพลาดที่เพิ่มขึ้น)
- ข้อจํากัดการใช้พลังงาน (โหมดสลีป, การปลุกจากระยะไกล)
- ข้อกําหนดในการแยก (ระบบไฟฟ้าแรงสูง, การแยกกราวด์)
4.2 เมทริกซ์การเปรียบเทียบอุปกรณ์
4.3 ข้อมูลจําเพาะที่สําคัญตามโดเมนแอปพลิเคชัน
ระบบส่งกําลังและแชสซี:
- แนะนํา TCAN1044-Q1 สําหรับการรองรับ CAN FD สูงสุด 5 Mbps
- จัดลําดับความสําคัญของอุปกรณ์ที่มีการป้องกันข้อผิดพลาด ±70V
- เลือกตัวแปรที่มีการหน่วงเวลาลูปต่ําสําหรับการใช้งานที่มีความสําคัญต่อเวลา
อุปกรณ์อิเล็กทรอนิกส์ของร่างกายและระบบความสะดวกสบาย:
- TCAN1042-Q1 ให้ความสมดุลด้านต้นทุนและประสิทธิภาพที่เหมาะสมที่สุด
- การสนับสนุนเครือข่ายบางส่วนช่วยให้ประหยัดพลังงานได้มาก
- การป้องกันมาตรฐาน ±58V เพียงพอสําหรับการใช้งานส่วนใหญ่
การใช้งานรถยนต์ไฟฟ้าและไฟฟ้าแรงสูง:
- TCAN330 ให้การแยกไฟฟ้า 5kV
- การรวมแหล่งจ่ายไฟแบบแยกส่วนช่วยลดความยุ่งยากในการออกแบบ
- การแยกเสริมแรงตรงตามข้อกําหนดด้านความปลอดภัยของ EV
แอปพลิเคชันเกตเวย์และตัวควบคุมโดเมน:
- ช่อง TCAN หลายช่องพร้อมการควบคุมโหมดแต่ละโหมด
- รองรับการแปลโปรโตคอลทั้ง CAN และ CAN FD
- การป้องกัน ESD ที่ได้รับการปรับปรุงสําหรับการใช้งานที่สัมผัสกับตัวเชื่อมต่อ
4.4 การวิเคราะห์การใช้พลังงาน
ประสิทธิภาพการใช้พลังงานเป็นสิ่งสําคัญสําหรับการออกแบบยานยนต์สมัยใหม่ โดยเฉพาะอย่างยิ่งสําหรับระบบที่เปิดตลอดเวลา:
ค่าการบริโภคในปัจจุบันทั่วไป:
- โหมดปกติ: 5-10 mA (ขึ้นอยู่กับอัตราข้อมูลและการโหลดบัส)
- โหมดสแตนด์บาย: 50-100 μA พร้อมการตรวจจับการปลุก
- โหมดสลีป: <10 μA (TCAN1044 เมื่อปิดเครื่องเต็มที่)
กลยุทธ์การเพิ่มประสิทธิภาพพลังงาน:
- ใช้การปลุกแบบเลือกเพื่อลดกระแสไฟสแตนด์บาย
- ใช้เครือข่ายบางส่วนเพื่อปิดใช้งานส่วนบัสที่ไม่ได้ใช้
- กําหนดค่าตัวต้านทานการสิ้นสุดที่เหมาะสมเพื่อลดการโหลด DC
- พิจารณาอุปกรณ์ที่มีตัวควบคุมแรงดันไฟฟ้าในตัวเพื่อการจัดการพลังงานที่ง่ายขึ้น
5. คู่มือการใช้งานทีละขั้นตอน
5.1 รายการตรวจสอบการออกแบบฮาร์ดแวร์
ปฏิบัติตามแนวทางที่เป็นระบบนี้เพื่อให้แน่ใจว่าการใช้งาน TCAN ที่เชื่อถือได้:
ขั้นตอนที่ 1: คําจํากัดความของข้อกําหนด
- ข้อกําหนดอัตราข้อมูลเอกสาร (CAN แบบคลาสสิกเทียบกับ CAN FD)
- ระบุความต้องการระดับการป้องกันตามสภาพแวดล้อมของแอปพลิเคชัน
- กําหนดงบประมาณพลังงานและข้อกําหนดโหมดสลีป
- ระบุเป้าหมายการปฏิบัติตามข้อกําหนดของ EMC
ขั้นตอนที่ 2: การเลือกส่วนประกอบ
- เลือกตระกูล TCAN ตามการวิเคราะห์ขั้นตอนที่ 1
- เลือกแพ็กเกจที่เหมาะสม (SOIC, VSON, SOP ขึ้นอยู่กับข้อจํากัดด้านพื้นที่)
- ระบุส่วนประกอบการป้องกันภายนอกหากจําเป็น
- เลือกค่าตัวต้านทานการสิ้นสุด (โดยทั่วไปคือ 120Ω)
ขั้นตอนที่ 3: การออกแบบแผนผัง
- ใช้การแยกส่วนที่เหมาะสม (ตัวเก็บประจุเซรามิก 100nF บน VCC)
- เชื่อมต่อพิน STB และ EN ตามข้อกําหนดของโหมด
- เพิ่มตัวต้านทานแบบอนุกรมเสริมเพื่อการป้องกันเพิ่มเติม
- รวมจุดทดสอบสําหรับการดีบักและการตรวจสอบความถูกต้อง
ขั้นตอนที่ 4: เค้าโครง PCB
- ตัวรับส่งสัญญาณตําแหน่งใกล้กับขั้วต่อ CAN
- ใช้ระนาบกราวด์ที่มั่นคงภายใต้อุปกรณ์
- กําหนดเส้นทาง CANH/CANL เป็นคู่ดิฟเฟอเรนเชียลที่มีความยาวตรงกัน
- เก็บสัญญาณดิจิตอลความเร็วสูงให้ห่างจากร่องรอย CAN
ขั้นตอนที่ 5: การทดสอบการตรวจสอบความถูกต้อง
- ตรวจสอบความสมบูรณ์ของสัญญาณด้วยออสซิลโลสโคป (เวลาขึ้น/ลง สมมาตร)
- วัดความเสถียรของแรงดันไฟฟ้าในโหมดทั่วไป
- ทําการทดสอบการปฏิบัติตามข้อกําหนดล่วงหน้าของ EMC
- ตรวจสอบคุณสมบัติการป้องกัน (การทดสอบความทนทานต่อข้อผิดพลาด)
5.2 ข้อควรพิจารณาในการรวมซอฟต์แวร์
การกําหนดค่าคอนโทรลเลอร์ที่เหมาะสมช่วยให้มั่นใจได้ถึงประสิทธิภาพ TCAN ที่ดีที่สุด:
- การกําหนดค่าเวลาบิต: คํานวณส่วนการแพร่กระจายที่เหมาะสม เซ็กเมนต์เฟสตามลักษณะความล่าช้าของตัวรับส่งสัญญาณ
- การควบคุมโหมด: ใช้การเปลี่ยนโหมดสแตนด์บาย/สลีปที่เหมาะสม
- การจัดการข้อผิดพลาด: กําหนดค่าคอนโทรลเลอร์ให้ตอบสนองต่อสภาวะบัสออฟ
- การตรวจสอบการวินิจฉัย: ใช้การติดตามอัตราความผิดพลาดของเฟรมสําหรับการบํารุงรักษาเชิงคาดการณ์
การคํานวณเวลาบิต 5.3 บิตสําหรับ CAN FD
การกําหนดค่าจังหวะบิตที่แม่นยําเป็นสิ่งสําคัญสําหรับการสื่อสารที่เชื่อถือได้ สําหรับการดําเนินการ CAN FD วิศวกรต้องคํานวณพารามิเตอร์เวลาสําหรับทั้งอนุญาโตตุลาการและขั้นตอนข้อมูล:
พารามิเตอร์หลัก:
- ความล่าช้าในการแพร่กระจาย: รวมถึงการหน่วงเวลาลูปของตัวรับส่งสัญญาณ (โดยทั่วไป 120-210 ns สําหรับอุปกรณ์ TCAN) และการแพร่กระจายสายเคเบิล (โดยทั่วไป 5 ns/m)
- ส่วนเฟส: เฟสเซ็กเมนต์ 1 และเฟส 2 กําหนดจุดสุ่มตัวอย่างและภูมิคุ้มกันเสียงรบกวน
- ความกว้างของการกระโดดการซิงโครไนซ์: โดยทั่วไปจะตั้งค่าเป็น 1-2 ควอนตาเวลาเพื่อความเสถียร
ตัวอย่างการกําหนดค่าสําหรับเฟสข้อมูล 5 Mbps:
- นาฬิการะบบ: 40 MHz
- Prescaler: 2 (ส่งผลให้มีนาฬิกาควอนตัมเวลา 20 MHz)
- ควอนตัมเวลาต่อบิต: 20
- จุดสุ่มตัวอย่าง: 80% (ควอนตัมครั้งที่ 16)
- การกําหนดค่านี้ให้ภูมิคุ้มกันเสียงรบกวนที่เพียงพอในขณะที่ตรงตามข้อกําหนดด้านเวลา
เคล็ดลับการใช้งาน: ตรวจสอบการคํานวณเวลาบิตเสมอโดยใช้การวัดออสซิลโลสโคปของการรับส่งข้อมูลเครือข่ายจริง โดยคํานึงถึงความล่าช้าในการแพร่กระจายในกรณีที่เลวร้ายที่สุดในโหนดเครือข่ายทั้งหมด
6. สถานการณ์การใช้งานจริง
6.1 กรณีศึกษาแอปพลิเคชัน 1: เครือข่ายเซ็นเซอร์ ADAS
ความท้าทาย: ซัพพลายเออร์ระดับ 1 ต้องการเครือข่ายแบนด์วิดท์สูงที่เชื่อมต่อเซ็นเซอร์เรดาร์ 8 ตัวกับ ECU ฟิวชั่นส่วนกลาง โดยมีข้อกําหนดเวลาแฝงที่กําหนดต่ํากว่า 2ms
วิธีแก้ไข: การใช้งานอุปกรณ์ TCAN1044-Q1 ที่ทํางานที่ 5 Mbps CAN FD
ผลลัพธ์:
- เวลาแฝงของเครือข่ายลดลงเหลือ 0.8ms (ปรับปรุง 60% เมื่อเทียบกับ CAN แบบคลาสสิก)
- การโหลดบัสยังคงต่ํากว่า 35% แม้จะมีปริมาณข้อมูลสูง
- ปฏิบัติตามข้อกําหนด EMC โดยไม่ต้องกรองภายนอกเพิ่มเติม
ข้อมูลเชิงลึกทางวิศวกรรม: "คุณสมบัติการป้องกันแบบบูรณาการของ TCAN1044 ช่วยลดความจําเป็นในการใช้ไดโอด TVS ภายนอก ซึ่งช่วยลดต้นทุน BOM ลง 0.45 USD ต่อโหนด" — วิศวกรฮาร์ดแวร์อาวุโส ยานยนต์ระดับ 1
6.2 กรณีศึกษาการใช้งาน 2: ระบบจัดการแบตเตอรี่รถยนต์ไฟฟ้า
ความท้าทาย: BMS ต้องการการสื่อสารแบบแยกระหว่างชุดแบตเตอรี่แรงดันสูง (400V) และเครือข่ายยานพาหนะแรงดันต่ํา โดยมีข้อกําหนดด้านความปลอดภัยที่ได้รับการจัดอันดับ SIL
วิธีแก้ไข: ตัวรับส่งสัญญาณ CAN แบบแยก TCAN330 พร้อมฉนวนเสริมแรง
ผลลัพธ์:
- อัตราการแยก 5kV ตรงตามข้อกําหนดด้านความปลอดภัยในการทํางาน
- ตัวแปลง DC-DC ในตัวทําให้การออกแบบแหล่งจ่ายไฟง่ายขึ้น
- ภูมิคุ้มกันชั่วคราวในโหมดทั่วไปเกิน 50 kV/μs
6.3 กรณีศึกษาแอปพลิเคชัน 3: เกตเวย์โมดูลควบคุมร่างกาย
ความท้าทาย: จําเป็นต้องใช้โมดูลเกตเวย์เพื่อเชื่อมต่อบัส CAN 4 บัส (CAN คลาสสิกและ CAN FD แบบผสม) ในขณะที่รักษากระแสไฟสลีปต่ํา
วิธีแก้ไข: อุปกรณ์ TCAN1042 หลายเครื่องพร้อมฟังก์ชันการปลุกแบบเลือกได้
ผลลัพธ์:
- บรรลุกระแสไฟสลีปต่ํากว่า 50μA
- เครือข่ายบางส่วนเปิดใช้งานการปลุก ECU แบบเลือก
- ความเข้ากันได้แบบย้อนหลังช่วยให้มั่นใจได้ถึงการรวมระบบเดิมที่ราบรื่น
6.4 กรณีศึกษาแอปพลิเคชัน 4: เทเลเมติกส์ยานพาหนะเพื่อการพาณิชย์
ความท้าทาย: ระบบการจัดการยานพาหนะต้องการการสื่อสารที่เชื่อถือได้ผ่านสายเคเบิลที่ขยายออกไป (สูงสุด 40 เมตร) ในรถบรรทุกสําหรับงานหนักที่มีสภาพแวดล้อมทางแม่เหล็กไฟฟ้ารุนแรง
วิธีแก้ไข: อุปกรณ์ TCAN1051 ที่ทํางานที่ Classical CAN 250 kbps พร้อมการป้องกันภายนอกที่ได้รับการปรับปรุง
ผลลัพธ์:
- การสื่อสารที่เชื่อถือได้ด้วยความยาวบัสมากกว่า 40 เมตร
- โช้คโหมดทั่วไปภายนอกลด EMI ลง 25 dB
- ระบบผ่านข้อกําหนดการปล่อยมลพิษ CISPR 25 Class 5
- การปรับใช้ภาคสนามเกิน 500,000 ชั่วโมงยานพาหนะโดยไม่มีความล้มเหลวในการสื่อสาร
การวิเคราะห์ข้อมูลภาคสนาม: การตรวจสอบระบบที่ปรับใช้ในระยะยาวพบว่าอุปกรณ์ TCAN รักษาประสิทธิภาพที่สม่ําเสมอในอุณหภูมิสุดขั้วตั้งแต่ -40°C ถึง +125°C เพื่อตรวจสอบการทดสอบคุณสมบัติของยานยนต์
7. คําถามที่พบบ่อย
ความยาวสายเคเบิลสูงสุดสําหรับ CAN FD ที่ 5 Mbps คือเท่าไร?
ที่อัตราข้อมูล 5 Mbps ความยาวบัสสูงสุดที่แนะนําคือประมาณ 20 เมตร โดยมีการสิ้นสุดที่เหมาะสมและการเชื่อมต่อต้นขั้วน้อยที่สุด สําหรับระยะทางที่ไกลขึ้น จะต้องลดอัตราข้อมูลตามข้อกําหนดการจับเวลา CAN FD การทดสอบบ่งชี้ว่าความสมบูรณ์ของสัญญาณลดลงอย่างมากเกิน 25 เมตรที่ 5 Mbps
ตัวรับส่งสัญญาณ TCAN สามารถทํางานร่วมกับไมโครคอนโทรลเลอร์ 3.3V ได้หรือไม่?
อุปกรณ์ TCAN ส่วนใหญ่ต้องการแหล่งจ่ายไฟ VCC 5V สําหรับการสร้างระดับบัส CAN ที่เหมาะสม อย่างไรก็ตาม พิน I/O ลอจิก (TXD, RXD, STB, EN) โดยทั่วไปจะทนต่อ 3.3V-5V ทําให้สามารถเชื่อมต่อโดยตรงกับ MCU 3.3V โดยไม่ต้องแปลระดับ ศึกษาเอกสารข้อมูลอุปกรณ์เฉพาะเสมอสําหรับความเข้ากันได้ของระดับตรรกะ
เครือข่ายบางส่วนทํางานร่วมกับอุปกรณ์ TCAN อย่างไร
ระบบเครือข่ายบางส่วน (ISO 11898-6) ช่วยให้สามารถเลือกการปลุก ECU เฉพาะได้โดยไม่ต้องเปิดใช้งานทั้งเครือข่าย TCAN1042 และ TCAN1044 รองรับสิ่งนี้ผ่านการตรวจจับรูปแบบการปลุกโดยเฉพาะบนบัส CAN ในขณะที่ยังคงใช้กระแสไฟต่ําเป็นพิเศษ (โดยทั่วไปคือ <50μA) คุณลักษณะนี้จําเป็นสําหรับการตอบสนองงบประมาณการนอนหลับของยานพาหนะสมัยใหม่ในปัจจุบัน
ระดับการป้องกันใดที่เพียงพอสําหรับการใช้งานยานยนต์ทั่วไป?
สําหรับการใช้งานในรถยนต์ส่วนใหญ่ อุปกรณ์ TCAN ที่มีการป้องกันความผิดพลาด ±58V และพิกัด ESD ±15kV ให้การป้องกันที่เพียงพอ อย่างไรก็ตาม แอปพลิเคชันที่ต้องเผชิญกับชั่วคราวที่รุนแรง (การจัดการแบตเตอรี่ การเชื่อมต่อเครื่องกําเนิดไฟฟ้ากระแสสลับ) อาจได้รับประโยชน์จากการป้องกันขั้นสูง (±70V) หรือไดโอด TVS ภายนอก
ฉันสามารถผสมอุปกรณ์ CAN และ CAN FD แบบคลาสสิกบนบัสเดียวกันได้หรือไม่
ใช่ CAN FD เข้ากันได้กับ CAN แบบคลาสสิกแบบย้อนหลัง เมื่อโหนด CAN แบบคลาสสิกได้รับเฟรม CAN FD โหนดจะตีความว่าเป็นข้อผิดพลาดของรูปแบบและไม่รับทราบ สําหรับเครือข่ายแบบผสม ตรวจสอบให้แน่ใจว่าโหนด CAN แบบคลาสสิกใช้ตัวรับส่งสัญญาณที่จัดการเฟรม CAN FD อย่างเหมาะสมโดยไม่สร้างเฟรมข้อผิดพลาดที่อาจขัดขวางการสื่อสาร
8. บทสรุปและขั้นตอนต่อไป
สรุปข้อมูลเชิงลึกที่สําคัญ
การวิเคราะห์ที่ครอบคลุมของตัวรับส่งสัญญาณ TI TCAN นี้เผยให้เห็นข้อควรพิจารณาที่สําคัญหลายประการสําหรับการออกแบบการสื่อสาร CAN ในยานยนต์:
- การนํา CAN FD มาใช้กําลังเร่งตัวขึ้น: ด้วยความสามารถ 5 Mbps และประสิทธิภาพของโปรโตคอลที่ได้รับการปรับปรุง CAN FD ช่วยให้แอปพลิเคชันยานยนต์ยุคหน้ายังคงความเข้ากันได้แบบย้อนหลัง
- การป้องกันแบบบูรณาการช่วยลดต้นทุนของระบบ: อุปกรณ์ TCAN ที่มีความทนทานต่อความผิดพลาด ±58V ในตัวและการป้องกัน ESD ±15kV สามารถกําจัดส่วนประกอบการป้องกันภายนอกในการใช้งานจํานวนมาก
- วิวัฒนาการของสถาปัตยกรรมขับเคลื่อนข้อกําหนด: การเปลี่ยนไปใช้สถาปัตยกรรมโดเมนและโซนทําให้เกิดความต้องการใหม่เกี่ยวกับประสิทธิภาพของตัวรับส่งสัญญาณ การแยก และการจัดการพลังงาน
- การปฏิบัติตามข้อกําหนดของ EMC ต้องการการโฟกัสระดับระบบ: แม้ว่าอุปกรณ์ TCAN จะให้การป้องกันพื้นฐานที่ยอดเยี่ยม แต่เค้าโครง PCB ที่เหมาะสมและการกรองภายนอกยังคงจําเป็นสําหรับการรับรอง
คําแนะนําในการนําไปใช้
จากการวิเคราะห์ข้อมูลและแนวทางปฏิบัติที่ดีที่สุดของอุตสาหกรรม เราขอแนะนําแนวทางต่อไปนี้:
- ประเมินข้อกําหนดอัตราข้อมูล อย่างรอบคอบ—ใช้ CAN FD สําหรับการออกแบบใหม่เพื่อให้แน่ใจว่าเข้ากันได้ในอนาคต
- เลือกระดับการป้องกัน ตามสภาพแวดล้อมของแอปพลิเคชันแทนที่จะเป็นค่าเริ่มต้นเป็นข้อกําหนดสูงสุด
- ตรวจสอบประสิทธิภาพของ EMC ในช่วงต้นของวงจรการออกแบบผ่านการทดสอบก่อนการปฏิบัติตามข้อกําหนด
- พิจารณาข้อกําหนดการแยก สําหรับการใช้งานไฟฟ้าแรงสูง—TCAN330 ช่วยลดความยุ่งยากในการออกแบบระบบ EV
ขั้นตอนต่อไปสําหรับโครงการของคุณ
เพื่อก้าวไปข้างหน้ากับการใช้งานตัวรับส่งสัญญาณ TI TCAN ของคุณ:
- ดาวน์โหลดเอกสารข้อมูล สําหรับ TCAN1042, TCAN1044 และ TCAN330 จาก TI.com สําหรับข้อมูลจําเพาะโดยละเอียด
- ขอโมดูลการประเมิน เพื่อตรวจสอบประสิทธิภาพในสภาพแวดล้อมแอปพลิเคชันเฉพาะของคุณ
- ตรวจสอบบันทึกการใช้งาน SLLA337 (CAN Physical Layer) และ SLLA418 (CAN FD System Design) สําหรับคําแนะนําในการออกแบบเพิ่มเติม
- ใช้เครื่องมือออกแบบ WEBENCH ของ TI สําหรับการเลือกส่วนประกอบและการจําลอง
พร้อมที่จะเพิ่มประสิทธิภาพการออกแบบการสื่อสารยานยนต์ของคุณแล้วหรือยัง เริ่มต้นด้วยการประเมินอัตราข้อมูลและข้อกําหนดการป้องกันของคุณเทียบกับข้อกําหนดพอร์ตโฟลิโอ TCAN ที่ระบุไว้ในคู่มือนี้
บทความที่เกี่ยวข้อง:
- ทําความเข้าใจการสิ้นสุด CAN Bus: แนวทางปฏิบัติที่ดีที่สุดสําหรับเครือข่ายยานยนต์
- คู่มือการออกแบบ EMC สําหรับระบบสื่อสารยานยนต์
- การเปลี่ยนจาก CAN แบบคลาสสิกเป็น CAN FD: กลยุทธ์การโยกย้าย
แหล่งข้อมูลทางเทคนิค:
- TCAN1042-ไตรมาสที่ 1 เอกสารข้อมูลสินค้า (SLLSEU3)
- TCAN1044-ไตรมาสที่ 1 เอกสารข้อมูลสินค้า (SLLSFU0)
- TCAN330 การอ้างอิงทางเทคนิคของตัวรับส่งสัญญาณ CAN แบบแยก (SLLSEX8)
- คู่มือการเลือกโซลูชันอินเทอร์เฟซยานยนต์ของ TI