

Squirrel Cage Rotor vs Wound Rotor: การเปรียบเทียบทางเทคนิคที่ครอบคลุมสําหรับการเลือกมอเตอร์
เมื่อออกแบบหรือเลือกมอเตอร์เหนี่ยวนําสามเฟสสําหรับงานอุตสาหกรรมการตัดสินใจที่สําคัญที่สุดอย่างหนึ่งที่วิศวกรต้องเผชิญคือการเลือกระหว่างโรเตอร์กรงกระรอกและการกําหนดค่าโรเตอร์แบบบาดแผล ตัวเลือกนี้ส่งผลโดยตรงต่อแรงบิดเริ่มต้นความสามารถในการควบคุมความเร็วประสิทธิภาพข้อกําหนดในการบํารุงรักษาและต้นทุนรวมในการเป็นเจ้าของ การทําความเข้าใจความแตกต่างพื้นฐานระหว่างโรเตอร์ทั้งสองประเภทนี้และลักษณะการทํางานในสภาวะการทํางานต่างๆ เป็นสิ่งสําคัญสําหรับการเลือกมอเตอร์ที่เหมาะสมที่สุด
คู่มือฉบับสมบูรณ์นี้จะตรวจสอบความแตกต่างทางเทคนิค พารามิเตอร์ประสิทธิภาพ สถานการณ์การใช้งาน และเกณฑ์การคัดเลือกสําหรับใบพัดกรงกระรอกและใบพัดบาดแผล ไม่ว่าคุณจะเป็นวิศวกรไฟฟ้าที่ออกแบบระบบควบคุมมอเตอร์ใหม่ ผู้จัดการฝ่ายบํารุงรักษาที่ประเมินความน่าเชื่อถือของอุปกรณ์ หรือผู้เชี่ยวชาญด้านการจัดซื้อที่เปรียบเทียบตัวเลือกซัพพลายเออร์
สารบัญ
- [ความแตกต่างในการออกแบบพื้นฐานระหว่างกรงกระรอกและใบพัดบาดแผล] (# 1 - ความแตกต่างของการออกแบบพื้นฐาน)
- [การเปรียบเทียบพารามิเตอร์ประสิทธิภาพหลัก] (#2-key-performance-parameters)
- [ลักษณะการสตาร์ทและประสิทธิภาพแรงบิด] (# 3 - ลักษณะการสตาร์ท)
- [ความสามารถในการควบคุมความเร็วและการวิเคราะห์ประสิทธิภาพ] (#4-ความสามารถในการควบคุมความเร็ว)
- [คู่มือการเลือกเฉพาะแอปพลิเคชัน] (#5-การเลือกเฉพาะแอปพลิเคชัน)
- [การบํารุงรักษา ความน่าเชื่อถือ และต้นทุนรวมในการเป็นเจ้าของ] (#6-ค่าบํารุงรักษา-ความน่าเชื่อถือ-ต้นทุน)
- [ข้อผิดพลาดในการออกแบบทั่วไปและข้อผิดพลาดในการเลือก] (# 7-ข้อผิดพลาดในการออกแบบทั่วไป)
- คําถามที่พบบ่อย
1. ความแตกต่างของการออกแบบพื้นฐานระหว่างกรงกระรอกและใบพัดบาดแผล
ความแตกต่างหลักระหว่างมอเตอร์เหนี่ยวนําโรเตอร์กรงกระรอกและมอเตอร์เหนี่ยวนําโรเตอร์บาดแผลอยู่ที่โครงสร้างโรเตอร์ ซึ่งส่งผลต่อลักษณะทางไฟฟ้าและทางกลโดยพื้นฐาน
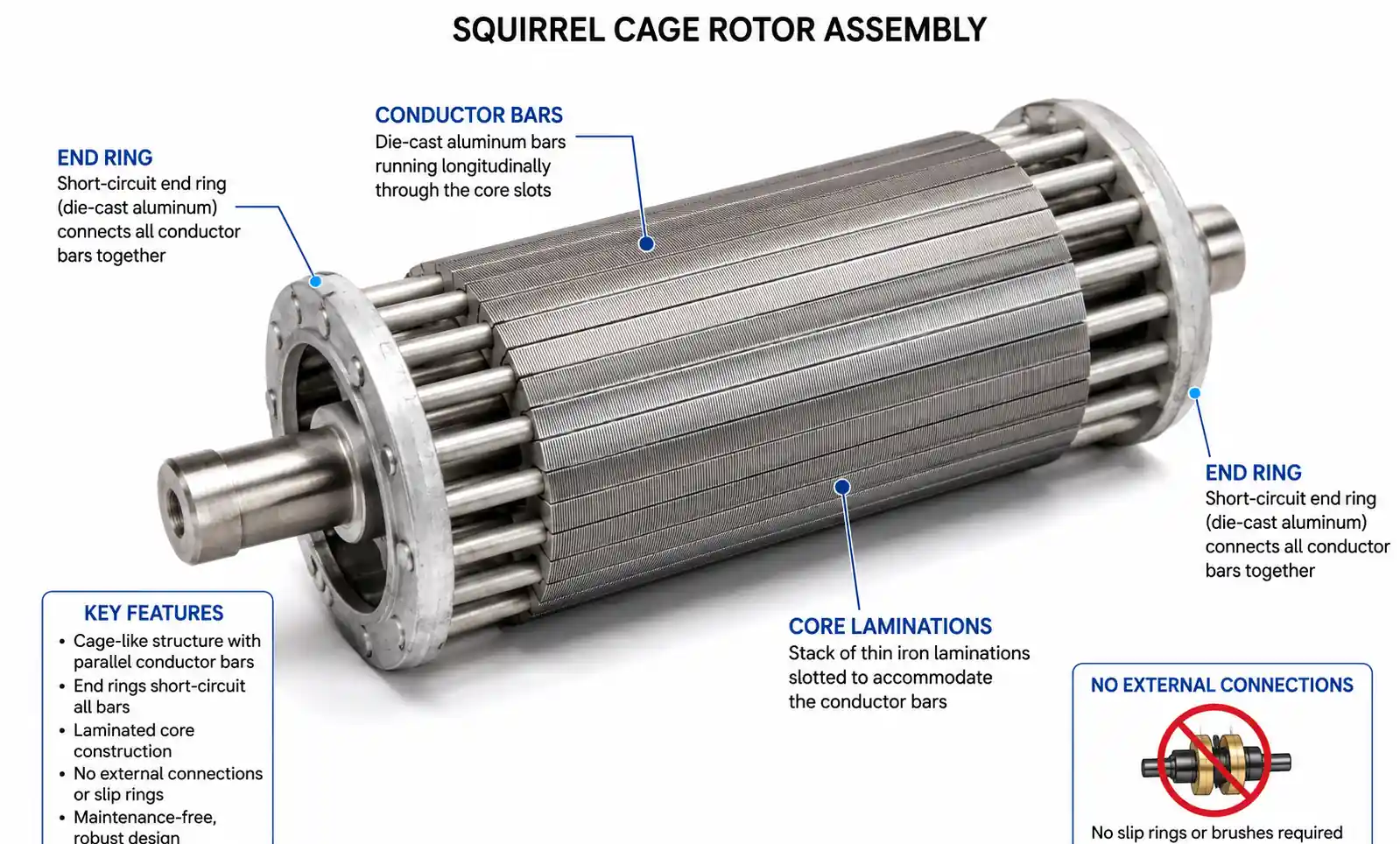
การก่อสร้างโรเตอร์กรงกระรอก
โรเตอร์กรงกระรอกประกอบด้วยแกนเหล็กลามิเนตที่มีช่องตามยาวที่มีแท่งอลูมิเนียมหรือทองแดงที่ไม่มีฉนวน แท่งเหล่านี้ลัดวงจรที่ปลายทั้งสองข้างโดยวงแหวนปลาย ทําให้เกิดโครงสร้างคล้ายกรงที่ทําให้โรเตอร์ประเภทนี้มีชื่อ โดยทั่วไปแล้วชุดประกอบทั้งหมดจะหล่อขึ้นรูปเป็นยูนิตเดียว ซึ่งส่งผลให้โครงสร้างแข็งแรงและไม่ต้องบํารุงรักษาโดยไม่มีการเชื่อมต่อทางไฟฟ้าภายนอก ขดลวดโรเตอร์ลัดวงจรอย่างถาวร ซึ่งหมายความว่าความต้านทานของโรเตอร์และรีแอกแตนซ์ได้รับการแก้ไขโดยการออกแบบและไม่สามารถปรับเปลี่ยนได้ระหว่างการทํางาน
ใบพัดกรงกระรอกสมัยใหม่ใช้อลูมิเนียม (ต้นทุนต่ํากว่า น้ําหนักเบา) หรือทองแดง (ประสิทธิภาพสูง การนําความร้อนที่ดีกว่า) สําหรับแถบตัวนํา นอกจากนี้ยังมีการออกแบบแถบลึกและกรงคู่สําหรับการใช้งานที่ต้องการแรงบิดเริ่มต้นที่ดีขึ้นโดยไม่ลดทอนประสิทธิภาพการทํางาน การไม่มีแหวนสลิป แปรง และตัวต้านทานภายนอกทําให้มอเตอร์กรงกระรอกมีความน่าเชื่อถือมากขึ้นโดยเนื้อแท้และเหมาะสําหรับสภาพแวดล้อมทางอุตสาหกรรมที่รุนแรง
การก่อสร้างโรเตอร์บาดแผล
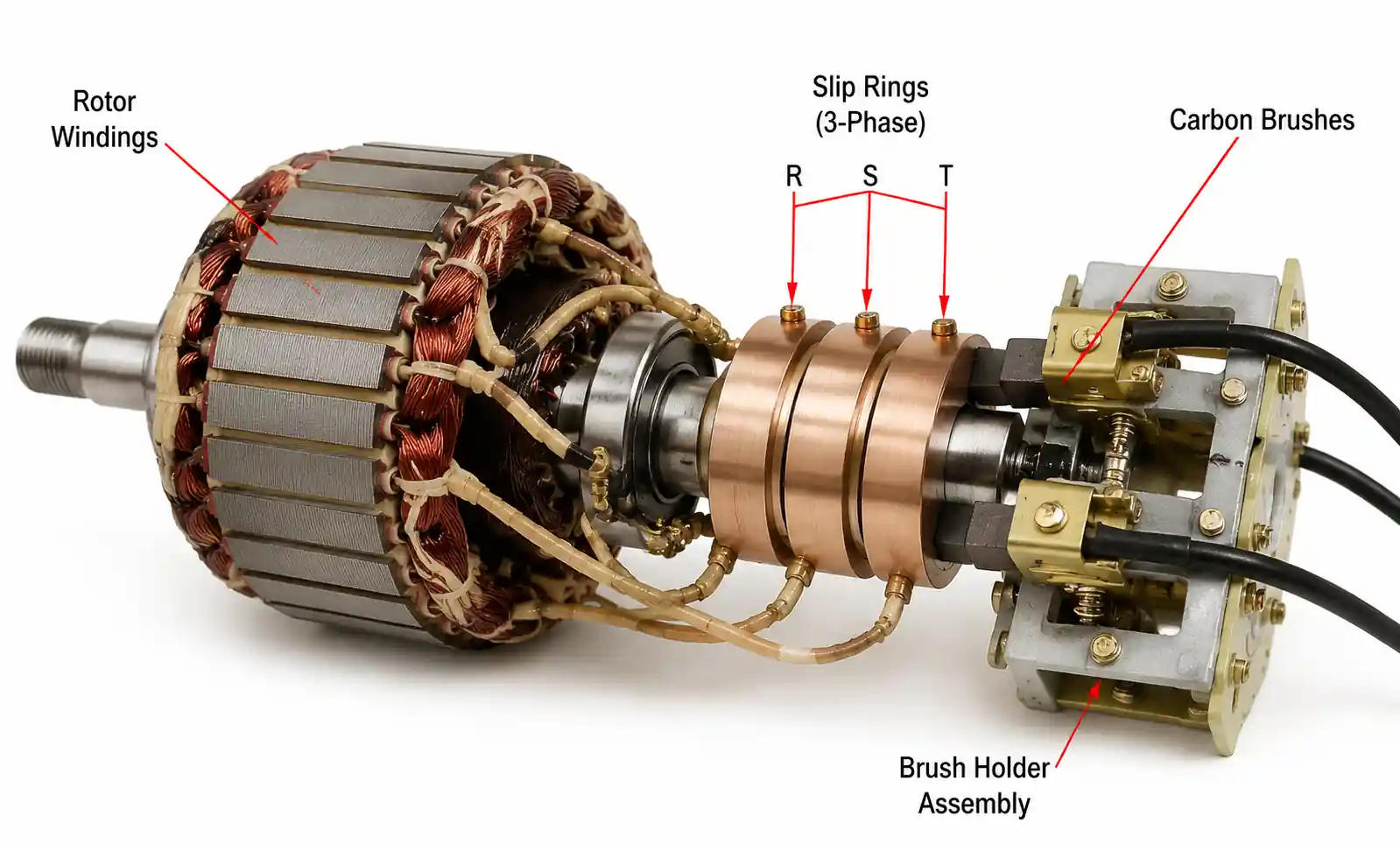
ในทางตรงกันข้าม โรเตอร์แบบบาดแผลมีขดลวดสามเฟสคล้ายกับสเตเตอร์ โดยมีขดลวดวางอยู่ในช่องรอบแกนโรเตอร์ โดยทั่วไปแล้วขดลวดเหล่านี้จะเชื่อมต่อด้วยดาวภายใน โดยปลายเปิดทั้งสามจะนําออกมาเป็นวงแหวนสลิปสามวงที่ติดตั้งอยู่บนเพลาโรเตอร์ แปรงคาร์บอนหรือโลหะกราไฟท์ที่ขี่บนวงแหวนสลิปเหล่านี้ให้การเชื่อมต่อทางไฟฟ้ากับแบงค์ต้านทานภายนอกหรือวงจรควบคุม การกําหนดค่านี้ช่วยให้ความต้านทานของวงจรโรเตอร์สามารถเปลี่ยนแปลงได้ในระหว่างสภาวะการสตาร์ทและการทํางานทําให้สามารถควบคุมลักษณะการทํางานของมอเตอร์ได้อย่างแม่นยํา
การออกแบบโรเตอร์แบบบาดแผลช่วยให้เข้าถึงวงจรโรเตอร์ซึ่งเป็นข้อได้เปรียบหลัก วิศวกรสามารถจํากัดกระแสไฟเข้าได้ในขณะที่รักษาแรงบิดเริ่มต้นที่สูง ในระหว่างการทํางานปกติความต้านทานภายนอกสามารถลดลงหรือลัดวงจรเพื่อให้ได้ประสิทธิภาพสูงสุด อย่างไรก็ตาม ความยืดหยุ่นนี้มาพร้อมกับความซับซ้อนที่เพิ่มขึ้น ความต้องการในการบํารุงรักษาที่สูงขึ้นเนื่องจากการสึกหรอของแปรงและแหวนสลิป และการลงทุนเริ่มต้นที่มากขึ้น
2. การเปรียบเทียบพารามิเตอร์ประสิทธิภาพหลัก
การทําความเข้าใจความแตกต่างเชิงปริมาณระหว่างมอเตอร์กรงกระรอกและมอเตอร์โรเตอร์บาดแผลเป็นสิ่งสําคัญสําหรับการตัดสินใจทางวิศวกรรม ตารางต่อไปนี้สรุปพารามิเตอร์ประสิทธิภาพที่สําคัญที่ส่งผลต่อการเลือกมอเตอร์
| พารามิเตอร์ | โรเตอร์กรงกระรอก โรเตอร์แผล | ผลกระทบทางวิศวกรรม |
|---|---|---|
| เริ่มต้นปัจจุบัน | 5-8× จัดอันดับปัจจุบัน | 2-3× จัดอันดับปัจจุบัน |
| แรงบิดเริ่มต้น | แรงบิดสูงสุด 50-100% (มาตรฐาน); 200-250% (การออกแบบแรงบิดสูง) | แรงบิดสูงสุด 200-300% (ปรับได้) |
| ประสิทธิภาพการโหลดเต็มที่ | 92-96% (IE3/IE4) | 92-96% (IE3/IE4) |
| ตัวประกอบกําลัง (โหลดเต็ม) | 0.85-0.90 | 0.85-0.90 |
| ช่วงการควบคุมความเร็ว | จํากัด (เว้นแต่จะใช้ VFD) | ความเร็วสูงสุด 50-100% (ผ่านความต้านทานโรเตอร์) |
| โรเตอร์สลิปที่พิกัดโหลดไฟฟ้า | มิซูมิ 1-3% | 1-3% |
| แรงบิดแบบดึงออก | แรงบิดสูงสุด 200-300% | แรงบิดสูงสุด 250-350% |
| ช่วงเวลาการบํารุงรักษา | 5000-8000 ชั่วโมง (แบริ่งเท่านั้น) | 1000-2000 ชั่วโมง (แปรง/แหวนสลิป) |
ช่องว่างด้านประสิทธิภาพระหว่างโรเตอร์ทั้งสองประเภทนี้มีความสําคัญอย่างยิ่งในการใช้งานที่มีการสตาร์ทบ่อย สําหรับการใช้งานความเร็วคงที่ที่มีความต้องการสตาร์ทปานกลาง มอเตอร์กรงกระรอกมักจะให้มูลค่าวงจรชีวิตที่เหนือกว่าเนื่องจากประสิทธิภาพที่สูงขึ้นและค่าใช้จ่ายในการบํารุงรักษาที่ต่ํากว่า
เมื่อประเมินพารามิเตอร์เหล่านี้สําหรับแอปพลิเคชันเฉพาะ ให้พิจารณาผลกระทบของการโต้ตอบ ตัวอย่างเช่น มอเตอร์โรเตอร์แบบบาดแผลอาจดูได้เปรียบสําหรับลักษณะการสตาร์ท แต่บทลงโทษด้านประสิทธิภาพ 3-5% จะสะสมเป็นต้นทุนด้านพลังงานจํานวนมากในการใช้งานต่อเนื่องที่ทํางาน 8000+ ชั่วโมงต่อปี ในทางกลับกันสําหรับมอเตอร์ที่สตาร์ทบ่อยหรือต้องการการควบคุมความเร็วเชิงกลโดยไม่มีอุปกรณ์อิเล็กทรอนิกส์ความสามารถในการควบคุมของโรเตอร์แผลอาจมีมากกว่าข้อเสียด้านประสิทธิภาพ
3. ลักษณะการสตาร์ทและประสิทธิภาพแรงบิด
พฤติกรรมการสตาร์ทของมอเตอร์เหนี่ยวนําเป็นหนึ่งในปัจจัยที่สําคัญที่สุดในการเลือกมอเตอร์ โดยเฉพาะอย่างยิ่งสําหรับการใช้งานที่มีโหลดความเฉื่อยสูงหรือกําลังการผลิตไฟฟ้าที่จํากัด
ประสิทธิภาพการสตาร์ทมอเตอร์กรงกระรอก
มอเตอร์กรงกระรอกมาตรฐานแสดงกระแสเริ่มต้นสูง (โดยทั่วไป 600-800% ของกระแสไฟที่กําหนด) แต่แรงบิดเริ่มต้นค่อนข้างเจียมเนื้อเจียมตัว (50-75% ของแรงบิดที่กําหนดสําหรับ NEMA Design A, 100-150% สําหรับการออกแบบ B) สิ่งนี้เกิดขึ้นเนื่องจากแถบโรเตอร์มีความต้านทานต่ําเมื่ออยู่กับที่ ส่งผลให้กระแสไฟสูงแต่ตัวประกอบกําลังต่ําระหว่างการสตาร์ท กระแสไฟไหลเข้าสูงอาจทําให้แรงดันไฟฟ้าลดลงอย่างมีนัยสําคัญในระบบไฟฟ้าที่อ่อนแอ ซึ่งอาจส่งผลกระทบต่ออุปกรณ์อื่นๆ ในแหล่งจ่ายเดียวกัน
เพื่อจัดการกับข้อจํากัดเหล่านี้ จึงมีการพัฒนารูปแบบการออกแบบหลายรูปแบบ โรเตอร์บาร์ลึกใช้เอฟเฟกต์ผิวหนังที่ความถี่เริ่มต้นเพื่อเพิ่มความต้านทานของโรเตอร์ที่มีประสิทธิภาพปรับปรุงแรงบิดเริ่มต้นให้อยู่ที่ประมาณ 150-200% ในขณะที่ลดกระแสเริ่มต้นลงเหลือ 500-650% ของค่าพิกัด การออกแบบกรงคู่ใช้แถบโรเตอร์สองชุด ได้แก่ กรงด้านนอกที่มีความต้านทานสูงสําหรับการสตาร์ทและกรงด้านในที่มีความต้านทานต่ําสําหรับการวิ่ง ซึ่งทําให้ได้การปรับปรุงประสิทธิภาพที่คล้ายคลึงกัน อย่างไรก็ตาม การออกแบบเฉพาะทางเหล่านี้มักจะเสียสละประสิทธิภาพการทํางาน 1-2% เมื่อเทียบกับการออกแบบมาตรฐาน
สําหรับการใช้งานที่ประสิทธิภาพการสตาร์ทเป็นสิ่งสําคัญ แต่ต้องการความเรียบง่ายของกรงกระรอก ซอฟต์สตาร์ทเตอร์หรือไดรฟ์ความถี่ตัวแปร (VFD) เป็นทางเลือกทางอิเล็กทรอนิกส์สําหรับการควบคุมโรเตอร์ที่บาดแผล ซอฟต์สตาร์ทเตอร์จํากัดกระแสเริ่มต้นผ่านการควบคุมแรงดันไฟฟ้าที่เพิ่มขึ้น แต่ไม่สามารถเพิ่มแรงบิดเริ่มต้นได้ VFD ให้การควบคุมที่เหนือกว่า ให้แรงบิดเต็มพิกัดที่ความเร็วเป็นศูนย์ในขณะที่จํากัดกระแสไฟไว้ที่ 150% หรือน้อยกว่า ซึ่งช่วยขจัดแรงบิดเริ่มต้นแบบเดิมได้อย่างมีประสิทธิภาพเมื่อเทียบกับการเริ่มต้นการแลกเปลี่ยนในปัจจุบัน
ประสิทธิภาพการสตาร์ทมอเตอร์โรเตอร์แผล
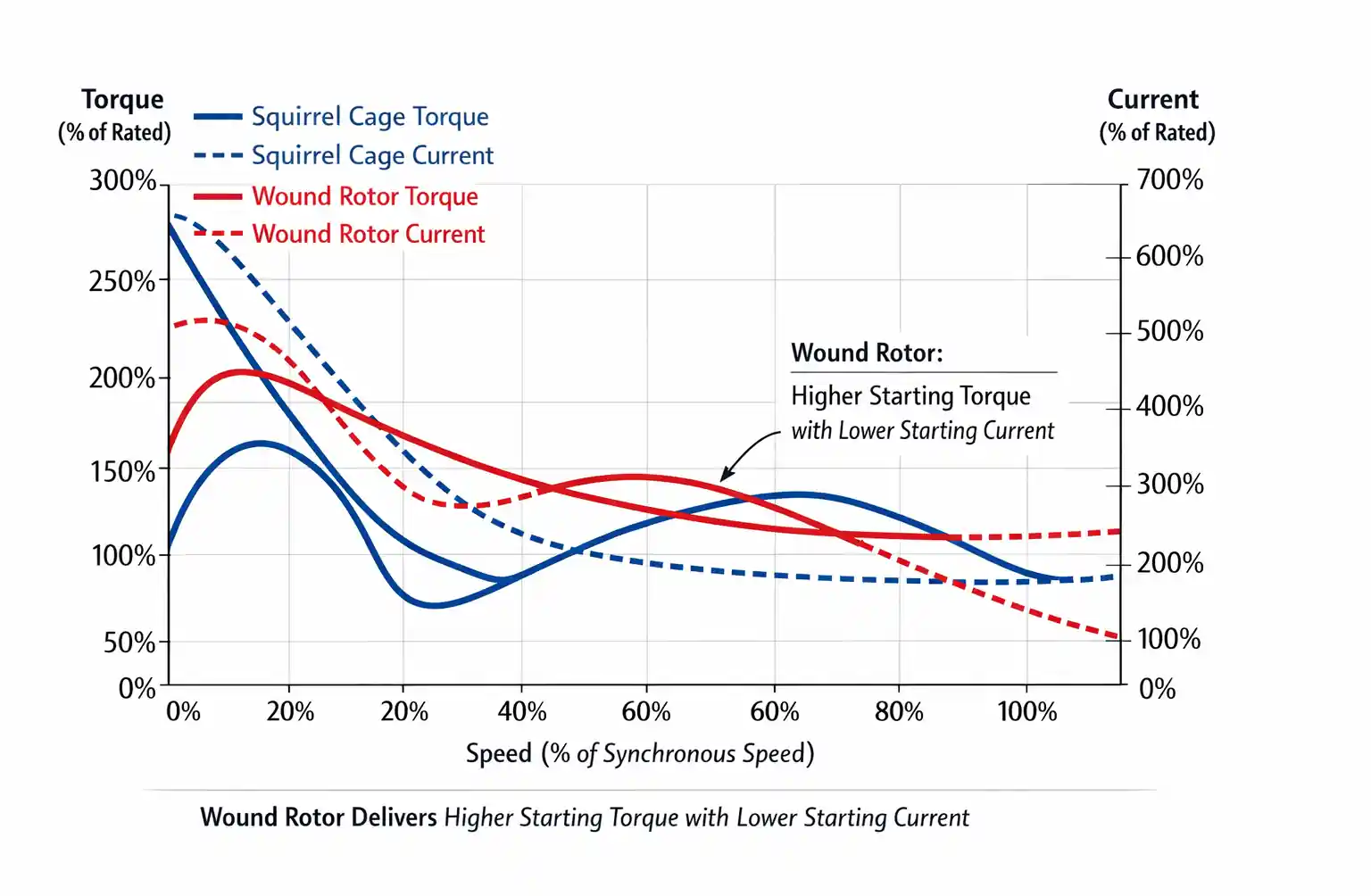
มอเตอร์โรเตอร์แบบบาดแผลมีประสิทธิภาพในการสตาร์ทเนื่องจากความสามารถในการต้านทานโรเตอร์แบบแปรผัน ด้วยการใส่ความต้านทานภายนอกสูงสุดระหว่างการสตาร์ทตัวประกอบกําลังของโรเตอร์จะดีขึ้นอย่างมากทําให้มอเตอร์สามารถพัฒนาแรงบิดเริ่มต้น 200-300% ในขณะที่ดึงกระแสเริ่มต้นเพียง 200-300% นี่แสดงถึงข้อได้เปรียบพื้นฐานเหนือมอเตอร์กรงกระรอกสําหรับการใช้งานเช่นพัดลมความเฉื่อยสูงสายพานลําเลียงโหลดเครื่องบดและโรงสีที่ต้องการทั้งแรงบิดเริ่มต้นสูงและกระแสเริ่มต้นที่จํากัดพร้อมกัน
ลําดับการสตาร์ทสําหรับมอเตอร์โรเตอร์แบบบาดแผลมักเกี่ยวข้องกับการลดความต้านทานหลายขั้นตอนเมื่อมอเตอร์เร่งความเร็ว แบงค์ตัวต้านทานสตาร์ทที่ออกแบบมาอย่างดีอาจมี 4-6 ขั้นตอน โดยแต่ละขั้นตอนจะลัดวงจรเมื่อมอเตอร์ถึงความเร็วที่กําหนดไว้ล่วงหน้า ตัวควบคุมอิเล็กทรอนิกส์สมัยใหม่ทําให้กระบวนการนี้เป็นไปโดยอัตโนมัติ โดยปรับโปรไฟล์การเร่งความเร็วให้เหมาะสมเพื่อการสูญเสียพลังงานน้อยที่สุดและความราบรื่นของแรงบิดสูงสุด เมื่อมอเตอร์ถึงความเร็วที่กําหนดความต้านทานภายนอกจะลัดวงจรจนสุดและมอเตอร์จะทํางานด้วยประสิทธิภาพสูงสุดคล้ายกับมอเตอร์กรงกระรอก
ตารางต่อไปนี้เปรียบเทียบลําดับการสตาร์ททั่วไปสําหรับมอเตอร์ทั้งสองประเภทในการใช้งาน 100 HP, 460V:
| วิธีการสตาร์ท | กระแสเริ่มต้นสูงสุด | แรงบิดเริ่มต้น | เวลาเร่งความเร็ว | ความเหมาะสมในการใช้งาน |
|---|---|---|---|---|
| กรงกระรอก - DOL (ออนไลน์โดยตรง) | 600 A (600%) | 600 ก. 75% | 75% | 3-5 วินาที |
| กรงกระรอก - Star-Delta | 200A (200%) | 200A (200%) | 200A (200%) | 200A ( 25% |
| กรงกระรอก - ซอฟต์สตาร์ทเตอร์ | Squirrel Cage 300 A (300%) | 300 ก.พ. 40-50% | 40-50% | 10-15 วินาที |
| กรงกระรอก - VFD | 150A (150%) | 150 ก.พ. 150% | 150% | ตัวแปร |
| Wound Rotor - ตัวต้านทาน 5 ขั้นตอน | Wound Rotor 250A (250%) | 250A (250%) | 250A (250%) | 250A ( 250% |
การเปรียบเทียบนี้แสดงให้เห็นว่ามอเตอร์โรเตอร์แบบบาดแผลให้การผสมผสานที่เป็นเอกลักษณ์ของแรงบิดเริ่มต้นสูงกับกระแสเริ่มต้นปานกลางโดยไม่ต้องใช้การควบคุมอิเล็กทรอนิกส์ที่มีราคาแพงทําให้คุ้มค่าสําหรับการใช้งานเฉพาะแม้ว่าจะมีความต้องการการบํารุงรักษาที่สูงขึ้นก็ตาม
4. ความสามารถในการควบคุมความเร็วและการวิเคราะห์ประสิทธิภาพ
ข้อกําหนดในการควบคุมความเร็วมีอิทธิพลอย่างมากต่อการเลือกระหว่างมอเตอร์กรงกระรอกและมอเตอร์โรเตอร์แบบบาดแผล เนื่องจากแต่ละประเภทมีข้อได้เปรียบที่แตกต่างกันขึ้นอยู่กับวิธีการควบคุมและโปรไฟล์การทํางาน
ควบคุมความเร็วด้วยมอเตอร์กรงกระรอก
มอเตอร์กรงกระรอกแบบดั้งเดิมมีตัวเลือกการควบคุมความเร็วที่จํากัดโดยไม่ต้องใช้ไดรฟ์อิเล็กทรอนิกส์ การออกแบบการเปลี่ยนเสาสามารถให้ความเร็วแยกกันได้ 2-4 ความเร็ว (เช่น 1800/900 รอบต่อนาที หรือ 1200/900/600 รอบต่อนาที) แต่สิ่งเหล่านี้เป็นการเปลี่ยนแปลงขั้นตอนมากกว่าการปรับอย่างต่อเนื่อง สําหรับการใช้งานที่ต้องการการเปลี่ยนแปลงความเร็วที่ราบรื่นมอเตอร์กรงกระรอกจะต้องจับคู่กับไดรฟ์ความถี่ตัวแปร (VFD)
การควบคุม VFD ของมอเตอร์กรงกระรอกได้กลายเป็นแนวทางที่โดดเด่นสําหรับการใช้งานแบบปรับความเร็วในโรงงานอุตสาหกรรมสมัยใหม่ ด้วยการเปลี่ยนแปลงทั้งแรงดันไฟฟ้าและความถี่ในขณะที่รักษาอัตราส่วน V/Hz VFD ให้คุณสมบัติแรงบิดที่ยอดเยี่ยมตลอดช่วงความเร็วทั้งหมด มอเตอร์จะทํางานที่การลื่นลดลงตามลําดับ VFD สมัยใหม่มีประสิทธิภาพของระบบโดยรวม 94-97% ในช่วงการทํางานปกติ โดยโดยทั่วไปแล้วไดรฟ์เองจะสูญเสีย 2-3%
ข้อจํากัดหลักของมอเตอร์กรงกระรอกที่ควบคุมด้วย VFD คือการระบายความร้อนด้วยความเร็วต่ํา ต่ํากว่าประมาณ 30% ของความเร็วที่กําหนด พัดลมที่ติดตั้งบนโรเตอร์ให้การไหลเวียนของอากาศไม่เพียงพอ สําหรับการใช้งานที่ต้องการการทํางานด้วยความเร็วต่ําอย่างต่อเนื่องด้วยแรงบิดเต็มที่ อาจจําเป็นต้องใช้มอเตอร์ระบายอากาศแยกต่างหากหรือขนาดเฟรมที่ใหญ่ขึ้น
การควบคุมความเร็วด้วยมอเตอร์โรเตอร์บาดแผล
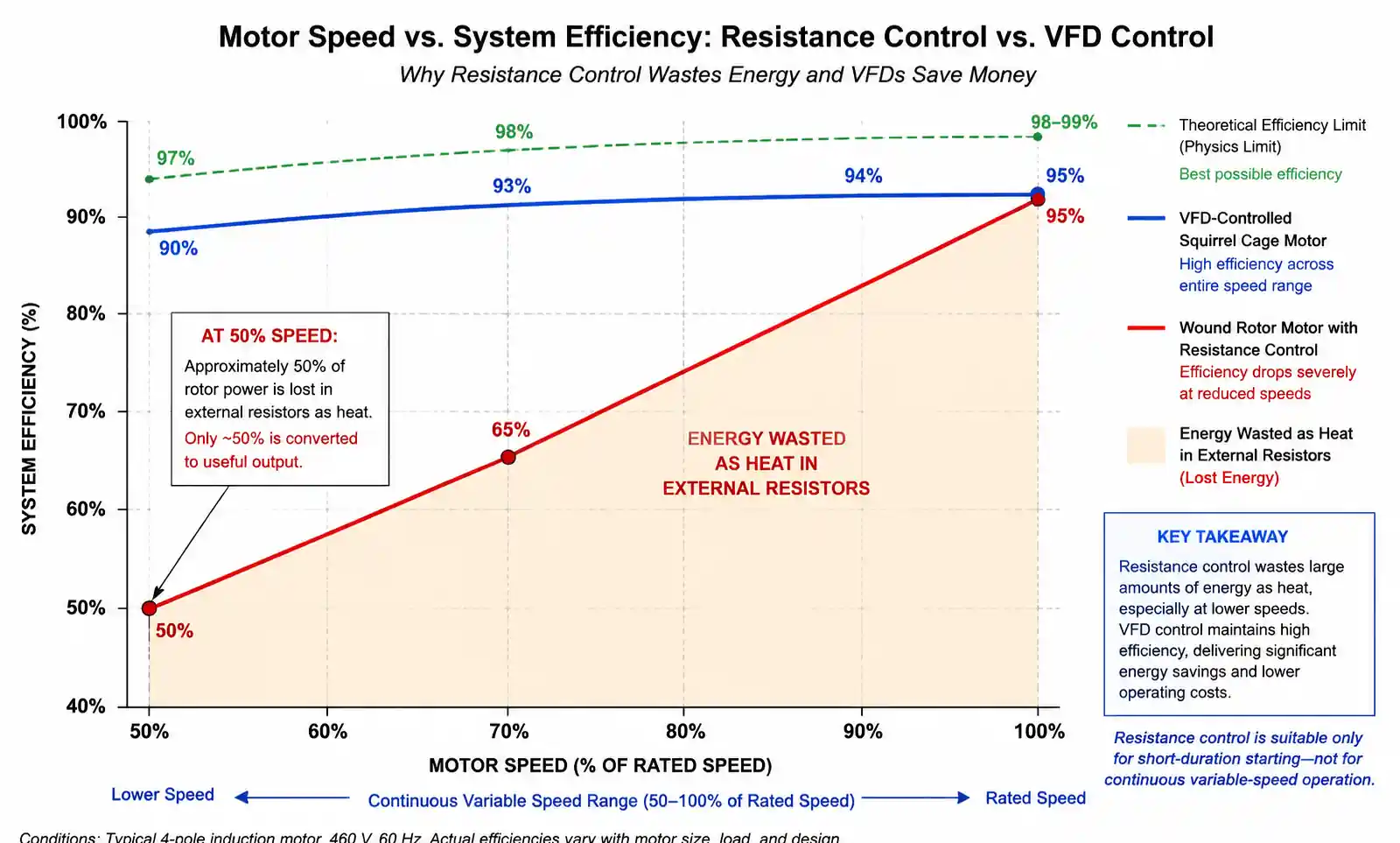
มอเตอร์โรเตอร์แบบบาดแผลให้การควบคุมความเร็วโดยธรรมชาติผ่านการเปลี่ยนแปลงความต้านทานของโรเตอร์โดยไม่ต้องแปลงความถี่ การเพิ่มความต้านทานภายนอกการลื่นไถลของมอเตอร์จะเพิ่มขึ้นตามสัดส่วนลดความเร็วในขณะที่ยังคงความสามารถในการบิด วิธีนี้แม้ว่าจะเรียบง่ายและแข็งแกร่ง แต่ก็ประสบกับการสูญเสียประสิทธิภาพอย่างมากที่ความเร็วที่ลดลงเนื่องจากพลังงานที่กระจายไปในวงจรโรเตอร์จะเพิ่มขึ้นตามการลื่นไถล
ความสัมพันธ์ระหว่างความเร็วและประสิทธิภาพในมอเตอร์โรเตอร์บาดแผลที่ควบคุมความต้านทานมีความสําคัญต่อการประเมินการใช้งาน ที่ความเร็ว 50% ประมาณ 50% ของกําลังไฟฟ้าเข้าของโรเตอร์จะกระจายไปเป็นความร้อนในตัวต้านทานภายนอก สิ่งนี้ทําให้การควบคุมความต้านทานไม่เหมาะสําหรับการทํางานต่อเนื่องที่ความเร็วลดลง แต่เป็นที่ยอมรับสําหรับการทํางานเป็นระยะหรือการใช้งานที่ระยะเวลาการลดความเร็วสั้น
สําหรับการใช้งานที่ต้องการการทํางานแบบปรับความเร็วได้อย่างมีประสิทธิภาพมอเตอร์โรเตอร์แบบบาดแผลสามารถติดตั้งไดรฟ์ Kramer แบบคงที่หรือไดรฟ์ Scherbius ซึ่งจะกู้คืนพลังงานลื่นและส่งกลับไปยังแหล่งจ่ายไฟแทนที่จะกระจายเป็นความร้อน ระบบเหล่านี้มีประสิทธิภาพเทียบเท่ากับมอเตอร์กรงกระรอกที่ควบคุมด้วย VFD แต่มีต้นทุนเงินทุนและความซับซ้อนที่สูงขึ้นอย่างมาก ดังนั้นจึงไม่ค่อยมีการระบุสําหรับการติดตั้งใหม่ โดยส่วนใหญ่ถูกแทนที่ด้วยมอเตอร์กรงกระรอกที่มี VFD
| วิธีการควบคุมความเร็ว | ช่วงความเร็ว | ประสิทธิภาพที่ความเร็ว 50% | ควบคุมความราบรื่น | ต้นทุนสัมพัทธ์ | แอปพลิเคชั่นที่ดีที่สุด | 2022 |---------------------|-------------|------------------------|-------------------|---------------|------------------| | กรงกระรอก + VFD | 0-100% | 0-100% | 94-96% | 94-96% | 94-96% | ยอดเยี่ยม | ปานกลาง | ความเร็วตัวแปรทั่วไป | | โรเตอร์บาดแผล + ความต้านทาน | 50-100% | 50-100% | 50-65% | 50-65% | ดี | ต่ํา | การลดความเร็วเป็นระยะ | โรเตอร์บาดแผล + การกู้คืนการลื่นไถล | 50-100% | 50-100% | 88-92% | 88-92% | ยอดเยี่ยม | สูงมาก | มอเตอร์ขนาดใหญ่ การทํางานต่อเนื่อง (รุ่นเก่า) | | การเปลี่ยนเสา | ขั้นตอนที่ไม่ต่อเนื่อง | 92-95% | 92-95% | 92-95% เปลี่ยนขั้นตอนเท่านั้น ต่ํา-ปานกลาง | แอพพลิเคชั่นหลายความเร็วคงที่ | Synus Thailand
ลักษณะการทํางานทําให้มอเตอร์กรงกระรอกที่ควบคุมด้วย VFD เป็นโซลูชันที่ต้องการสําหรับการใช้งานความเร็วตัวแปรที่ทันสมัยที่สุด โดยมอเตอร์โรเตอร์แบบบาดแผลยังคงใช้งานได้เป็นหลักในสถานการณ์การติดตั้งเพิ่มเติมซึ่งสามารถใช้ประโยชน์จากโครงสร้างพื้นฐานที่มีอยู่หรือในการใช้งานที่มีข้อกําหนดในการสตาร์ทที่เฉพาะเจาะจงมาก
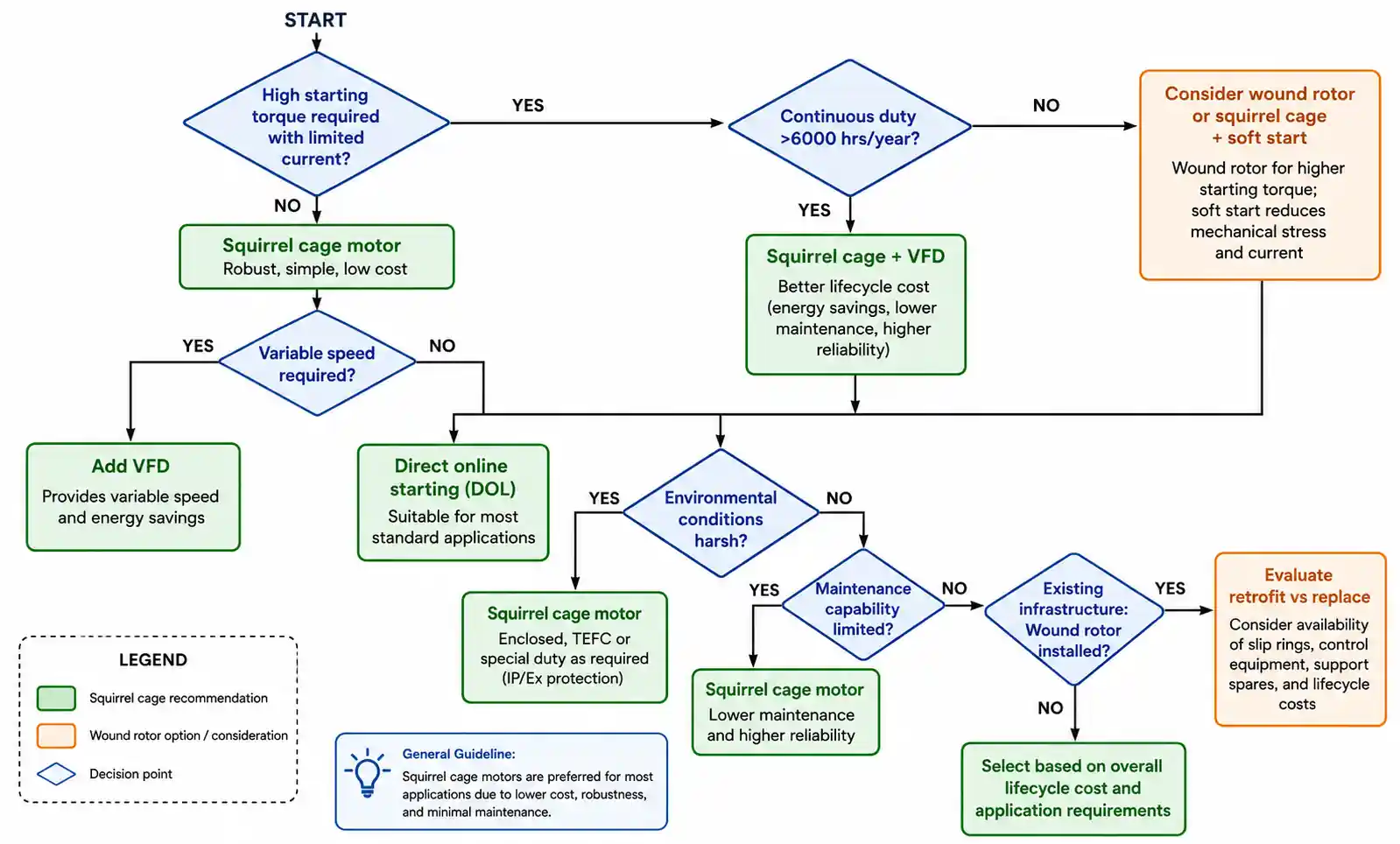
5. คู่มือการเลือกเฉพาะแอปพลิเคชัน
การเลือกประเภทโรเตอร์ที่เหมาะสมที่สุดจําเป็นต้องมีการวิเคราะห์ข้อกําหนดเฉพาะของแอปพลิเคชันอย่างรอบคอบ รวมถึงแรงบิดเริ่มต้น รอบการทํางาน ความต้องการในการควบคุมความเร็ว และสภาพแวดล้อมการทํางาน
เมื่อใดควรเลือกใบพัดกรงกระรอก
มอเตอร์กรงกระรอกเป็นตัวเลือกที่ต้องการสําหรับการใช้งานในอุตสาหกรรมส่วนใหญ่ เนื่องจากความเรียบง่าย ความน่าเชื่อถือ และต้นทุนรวมในการเป็นเจ้าของที่ต่ํากว่า เหมาะอย่างยิ่งสําหรับ:
การใช้งานความเร็วคงที่พร้อมโหลดเริ่มต้นเบาถึงปานกลาง: ปั๊ม พัดลม โบลเวอร์ และคอมเพรสเซอร์ที่ทํางานด้วยความเร็วคงที่ได้รับประโยชน์จากประสิทธิภาพสูงของมอเตอร์กรงกระรอกและการบํารุงรักษาน้อยที่สุด แม้จะมีกระแสไฟไหลเข้าสูง แต่ระยะเวลาเริ่มต้นสั้น ๆ ก็มีผลกระทบเล็กน้อยต่อการใช้พลังงานตลอดอายุการใช้งานของมอเตอร์
การใช้งานแบบปรับความเร็วได้เมื่อจับคู่กับ VFD: กระบวนการผลิตสมัยใหม่ ระบบ HVAC และอุปกรณ์ขนถ่ายวัสดุต้องการการควบคุมความเร็วตัวแปรมากขึ้น การผสมผสานระหว่างมอเตอร์กรงกระรอกและ VFD ให้ประสิทธิภาพที่ยอดเยี่ยมด้วยประสิทธิภาพของระบบเกิน 94% เหนือกว่าทางเลือกโรเตอร์บาดแผลที่ควบคุมด้วยความต้านทาน
สภาพแวดล้อมที่รุนแรงหรือเป็นอันตราย: การไม่มีแหวนสลิปและแปรงทําให้มอเตอร์กรงกระรอกเหมาะสําหรับการใช้งานในบรรยากาศที่ระเบิดได้ (Class I, Division 1/2) สภาพแวดล้อมที่มีฤทธิ์กัดกร่อน หรือสถานที่ที่มีระดับฝุ่นหรือความชื้นสูง โครงสร้างโรเตอร์ที่ปิดสนิทช่วยลดความเสี่ยงในการปนเปื้อนและขจัดอันตรายจากประกายไฟที่เกี่ยวข้องกับการสัมผัสแปรง
การใช้งานที่ต้องการการบํารุงรักษาขั้นต่ํา: สิ่งอํานวยความสะดวกที่มีเจ้าหน้าที่ซ่อมบํารุงจํากัดหรือการติดตั้งระยะไกลจะได้รับประโยชน์จากช่วงเวลาการบํารุงรักษาเฉพาะตลับลูกปืน 5,000-8,000 ชั่วโมงของมอเตอร์กรงกระรอก เทียบกับ 1,000-2,000 ชั่วโมงสําหรับบริการแปรงโรเตอร์แผลและแหวนสลิป

เมื่อใดควรเลือกมอเตอร์โรเตอร์แบบบาดแผล
แม้จะมีการครอบงําของมอเตอร์กรงกระรอก แต่การออกแบบโรเตอร์แบบบาดแผลยังคงเหมาะสมที่สุดสําหรับการใช้งานเฉพาะที่มีลักษณะเฉพาะของมันให้ข้อได้เปรียบที่จับต้องได้:
โหลดความเฉื่อยสูงที่ต้องการแรงบิดเริ่มต้นสูงโดยมีกระแสไฟจํากัด: โรงสีบอล เครื่องบด พัดลมระบายอากาศขนาดใหญ่ และรอกเหมืองมักนําเสนอการผสมผสานที่ท้าทายนี้ มอเตอร์โรเตอร์แบบบาดแผลสามารถให้แรงบิดเริ่มต้น 250-300% ในขณะที่ดึงกระแสไฟฟ้าเพียง 200-250% ซึ่งอาจเป็นทางออกเดียวที่ใช้งานได้จริงเมื่อกําลังการผลิตของแหล่งจ่ายไฟมีข้อจํากัดและ VFD มีต้นทุนสูงเนื่องจากขนาดมอเตอร์
การใช้งานติดตั้งเพิ่มเติมด้วยโครงสร้างพื้นฐานของโรเตอร์บาดแผลที่มีอยู่: เมื่อเปลี่ยนมอเตอร์ในโรงงานที่ติดตั้งแผงควบคุมความต้านทานโรเตอร์และสวิตช์เกียร์ที่เกี่ยวข้อง
การใช้งานที่ต้องการการเร่งความเร็วที่ควบคุมได้ของโหลดความเฉื่อยสูง: การสตาร์ทความต้านทานแบบขั้นบันไดของมอเตอร์โรเตอร์แบบบาดแผลให้การเร่งความเร็วที่ราบรื่นและควบคุมได้ ซึ่งจํากัดความเครียดเชิงกลบนข้อต่อ กระปุกเกียร์ และอุปกรณ์ขับเคลื่อน แม้ว่า VFD จะให้การควบคุมที่เหนือกว่า แต่วิธีการโรเตอร์บาดแผลอาจเป็นที่ต้องการในอุตสาหกรรมอนุรักษ์นิยมหรือในกรณีที่มีการใช้เทคโนโลยีที่ได้รับการพิสูจน์แล้ว
การควบคุมความเร็วในการใช้งานที่ไม่ต่อเนื่อง: สําหรับการใช้งานเช่นรอกเครนหรืออุปกรณ์ขึ้นรูปโลหะที่ต้องการความเร็วที่ลดลงในช่วงเวลาสั้น ๆ ตามด้วยการทํางานด้วยความเร็วเต็มที่การควบคุมความต้านทานอย่างง่ายของมอเตอร์โรเตอร์แบบบาดแผลสามารถประหยัดกว่าระบบ VFD แม้ว่าจะมีประสิทธิภาพต่ํากว่าในระหว่างการลดความเร็วก็ตาม
6. การบํารุงรักษา ความน่าเชื่อถือ และต้นทุนรวมในการเป็นเจ้าของ
การวิเคราะห์ทางเศรษฐกิจที่ครอบคลุมต้องคํานึงถึงไม่เพียง แต่ราคาซื้อเริ่มต้นเท่านั้น แต่ยังรวมถึงต้นทุนการติดตั้งการใช้พลังงานข้อกําหนดในการบํารุงรักษาและอายุการใช้งานที่คาดหวัง
การเปรียบเทียบต้นทุนเริ่มต้น
โดยทั่วไปแล้วมอเตอร์โรเตอร์แบบบาดแผลจะมีราคา 150-200% ของมอเตอร์กรงกระรอกที่เทียบเท่ากัน เนื่องจากโครงสร้างที่ซับซ้อนกว่า ซึ่งต้องการการไขลานที่แม่นยําของโรเตอร์ ธนาคารตัวต้านทานเริ่มต้นภายนอกจะเพิ่มอีก 20-30% ให้กับต้นทุนระบบทั้งหมด สําหรับมอเตอร์ 100 แรงม้า อาจแปลเป็น 15,000-20,000 ดอลลาร์สําหรับระบบโรเตอร์แบบบาดแผล เทียบกับ 8,000-10,000 ดอลลาร์สําหรับมอเตอร์กรงกระรอกที่มีซอฟต์สตาร์ทเตอร์ หรือ 12,000-15,000 ดอลลาร์สําหรับ VFD
อย่างไรก็ตาม การเปรียบเทียบต้นทุนจะซับซ้อนมากขึ้นสําหรับมอเตอร์ขนาดใหญ่ (สูงกว่า 500 แรงม้า) ซึ่งความสามารถของโรเตอร์แผลในการสตาร์ทโดยไม่มีการควบคุม VFD สามารถช่วยประหยัดต้นทุนอิเล็กทรอนิกส์กําลังได้อย่างมาก สําหรับการใช้งาน 2000 แรงม้า มอเตอร์โรเตอร์แบบบาดแผลที่มีความต้านทานสตาร์ทอาจมีราคา 120,000 ดอลลาร์เทียบกับ 180,000 ดอลลาร์สําหรับมอเตอร์กรงกระรอกที่มี VFD ที่ได้รับการจัดอันดับอย่างเหมาะสม
การวิเคราะห์ต้นทุนการดําเนินงาน
ต้นทุนพลังงานมีอิทธิพลเหนือเศรษฐกิจวงจรชีวิตสําหรับมอเตอร์ที่ทํางานมากกว่า 4000 ชั่วโมงต่อปี มอเตอร์ 100 แรงม้าทั่วไปที่ทํางาน 8000 ชั่วโมงต่อปีที่ 0.10 ดอลลาร์ต่อกิโลวัตต์ชั่วโมงใช้ไฟฟ้าประมาณ 60,000 ดอลลาร์ต่อปี ข้อได้เปรียบด้านประสิทธิภาพ 3-5% ของมอเตอร์กรงกระรอกแปลเป็นการประหยัดได้ 1,800-3,000 ดอลลาร์ต่อปี ซึ่งสามารถกู้คืนเบี้ยประกันภัยต้นทุนเริ่มต้นได้ภายใน 2-3 ปี
สําหรับมอเตอร์ที่มีความต้องการการควบคุมความเร็วที่สําคัญการเปรียบเทียบจะดียิ่งขึ้นสําหรับมอเตอร์กรงกระรอกที่ควบคุมด้วย VFD พลังงานที่นํากลับมาใช้ใหม่ผ่านการลดความเร็วอย่างมีประสิทธิภาพในระบบ VFD (เมื่อเทียบกับวาล์วควบคุมปริมาณหรือแดมเปอร์) โดยทั่วไปจะช่วยประหยัดพลังงานได้ 20-40% ซึ่งสูงกว่าต้นทุนของไดรฟ์ภายในปีแรกของการทํางาน
การพิจารณาค่าบํารุงรักษา
ข้อกําหนดในการบํารุงรักษาแตกต่างกันอย่างมากระหว่างมอเตอร์ทั้งสองประเภท มอเตอร์กรงกระรอกต้องการการหล่อลื่นแบริ่งเท่านั้น (ทุกๆ 5000-8000 ชั่วโมง) และการทําความสะอาดเป็นระยะ โดยค่าบํารุงรักษารายปีโดยทั่วไปอยู่ที่ 200-400 ดอลลาร์สําหรับหน่วย 100 แรงม้า มอเตอร์โรเตอร์แบบบาดแผลต้องเปลี่ยนแปรงทุกๆ 1,000-2,000 ชั่วโมง (300-500 ดอลลาร์) การเปลี่ยนพื้นผิวแหวนสลิปทุกๆ 2-3 ปี (800-1200 ดอลลาร์) และการบํารุงรักษาแบริ่งบ่อยขึ้นเนื่องจากภาระแรงดันแปรงเพิ่มเติม รวมเป็น 1,500-2,500 ดอลลาร์ต่อปี
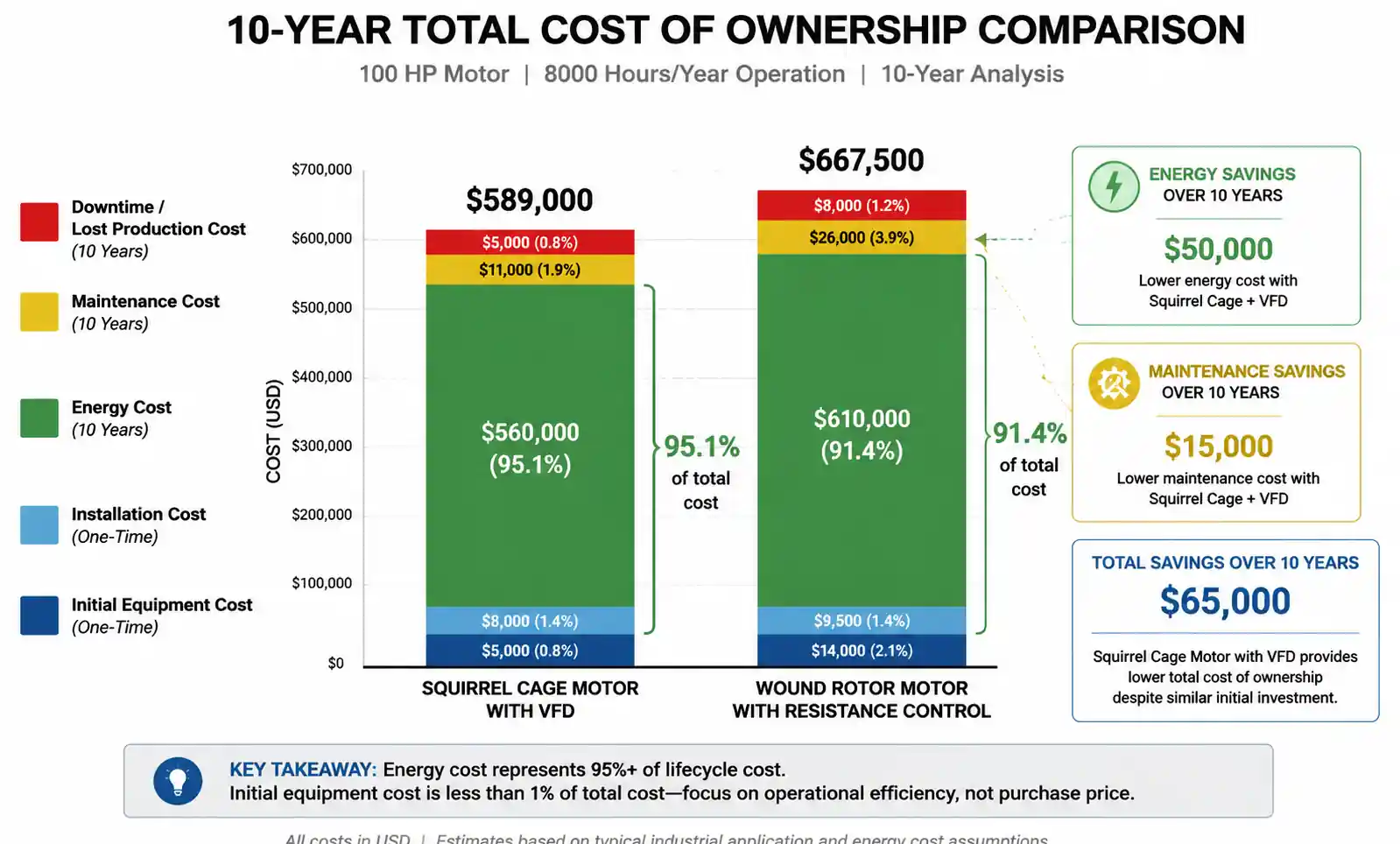
ตารางต่อไปนี้สรุปการเปรียบเทียบต้นทุนรวมในการเป็นเจ้าของ 10 ปีสําหรับการใช้งานทั่วไป 100 HP, 8000 ชั่วโมง/ปี:
| ส่วนประกอบต้นทุน | กรงกระรอก + VFD | โรเตอร์บาดแผล + ความต้านทาน |
|---|---|---|
| อุปกรณ์เบื้องต้น | $12,000 | $18,000 |
| การติดตั้ง | $2,000 | $3,500 |
| พลังงาน (10 ปี @ ประสิทธิภาพ 95%) | $570,000 | $620,000 |
| การบํารุงรักษา (10 ปี) | $3,000 | $18,000 |
| ค่าใช้จ่ายในการหยุดทํางาน (โดยประมาณ) | $2,000 | $8,000 |
| รวมค่าใช้จ่าย 10 ปี | $589,000 | $667,500 |
การวิเคราะห์นี้แสดงให้เห็นว่าสําหรับการใช้งานต่อเนื่องข้อได้เปรียบด้านประสิทธิภาพของมอเตอร์กรงกระรอกและความต้องการการบํารุงรักษาที่ต่ํากว่าจะช่วยประหยัดวงจรชีวิตได้มากแม้ว่าจะมีต้นทุนเริ่มต้นที่สูงขึ้นเมื่อรวมการควบคุม VFD
7. ข้อผิดพลาดในการออกแบบทั่วไปและข้อผิดพลาดในการเลือก
จากประสบการณ์ภาคสนามและกรณีการสนับสนุนทางเทคนิคข้อผิดพลาดที่เกิดขึ้นซ้ําหลายอย่างเกิดขึ้นเมื่อวิศวกรเลือกระหว่างมอเตอร์โรเตอร์กรงกระรอกและมอเตอร์โรเตอร์ที่บาดแผล
ประเมินข้อกําหนดเริ่มต้นต่ําเกินไป
ข้อผิดพลาดทั่วไปคือการเลือกมอเตอร์กรงกระรอกมาตรฐานสําหรับการใช้งานที่มีโหลดเริ่มต้นสูงโดยไม่ได้วิเคราะห์ความจุของแหล่งจ่ายไฟอย่างเพียงพอ กระแสไฟเริ่มต้น 600-800% อาจทําให้แรงดันไฟฟ้าลดลงเกิน 15% ซึ่งอาจทําให้รีเลย์แรงดันไฟตกสะดุดหรือขัดขวางอุปกรณ์อิเล็กทรอนิกส์ที่มีความละเอียดอ่อนในแหล่งจ่ายไฟเดียวกัน ก่อนระบุมอเตอร์ใดๆ ให้คํานวณแรงดันไฟฟ้าที่คาดไว้ระหว่างการสตาร์ทโดยใช้ความจุไฟฟ้าลัดวงจรของระบบและข้อมูลอิมพีแดนซ์ของมอเตอร์จากรายงานการทดสอบของผู้ผลิต
สําหรับการใช้งานที่การวิเคราะห์การเริ่มต้นเผยให้เห็นแรงดันไฟฟ้าตกมากเกินไป ให้พิจารณาการออกแบบกรงกระรอกแรงบิดสูง (NEMA Design C หรือ D) ซอฟต์สตาร์ทเตอร์ VFD หรือมอเตอร์โรเตอร์แบบบาดแผล แทนที่จะเป็นเพียงมอเตอร์ขนาดใหญ่เกินไป ซึ่งจะเพิ่มทั้งกระแสไฟเข้าและต้นทุนโดยไม่แก้ปัญหาพื้นฐาน
มองข้ามการระบายความร้อนด้วยความเร็วที่ลดลง
เมื่อระบุการควบคุม VFD สําหรับมอเตอร์กรงกระรอกวิศวกรหลายคนล้มเหลวในการคํานึงถึงการระบายความร้อนที่ลดลงที่ความเร็วต่ํา มอเตอร์ TEFC มาตรฐาน (Totally Enclosed Fan Cooled) พร้อมพัดลมที่ติดตั้งบนเพลาจะลดการไหลเวียนของอากาศลงประมาณ 50% ที่ความเร็ว 50% ซึ่งต้องมีการลดระดับลงอย่างมากสําหรับการทํางานที่ความเร็วต่ําอย่างต่อเนื่อง สําหรับการใช้งานที่ต้องการการทํางานอย่างต่อเนื่องต่ํากว่าความเร็วที่กําหนด 30% ให้ระบุมอเตอร์ที่มีการระบายอากาศแยกต่างหากหรือปรึกษาเส้นโค้งการลดพิกัดของผู้ผลิต
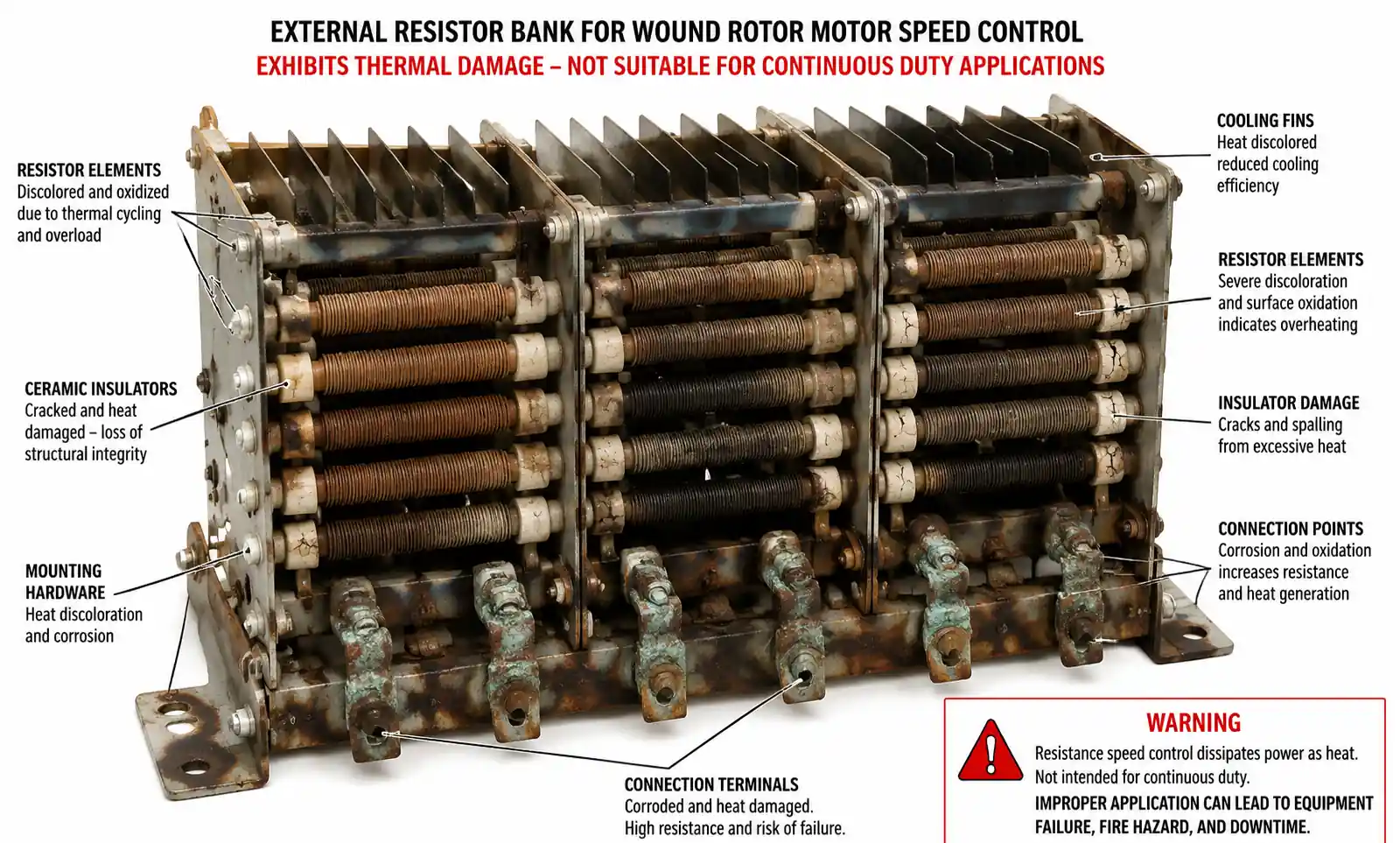
ใช้การควบคุมความเร็วโรเตอร์บาดแผลในทางที่ผิด
การระบุมอเตอร์โรเตอร์แบบบาดแผลพร้อมการควบคุมความเร็วความต้านทานสําหรับการทํางานแบบปรับความเร็วได้อย่างต่อเนื่องเป็นข้อผิดพลาดที่พบบ่อยซึ่งส่งผลให้เกิดการใช้พลังงานมากเกินไปและตัวต้านทานร้อนเกินไป การควบคุมความต้านทานจะประหยัดสําหรับการลดความเร็วเป็นระยะหรือการใช้งานที่เวลาในการทํางานที่ลดลงน้อยกว่า 20% ของเวลาทํางานทั้งหมด สําหรับการทํางานแบบปรับความเร็วได้อย่างต่อเนื่องมอเตอร์กรงกระรอกที่ควบคุมด้วย VFD ให้ประสิทธิภาพและประสิทธิภาพการควบคุมที่เหนือกว่ามาก
เพิกเฉยต่อปัจจัยแวดล้อม
สภาพแวดล้อมส่งผลต่อการเลือกมอเตอร์อย่างมาก แต่มักถูกมองข้าม มอเตอร์โรเตอร์แบบบาดแผลที่มีวงแหวนสลิปและแปรงแบบเปิดโล่งไม่เหมาะสําหรับสถานที่อันตรายที่ไม่มีเปลือกหุ้มป้องกันการระเบิดราคาแพงสําหรับการติดตั้งแปรง ในทํานองเดียวกันสภาพแวดล้อมของฝุ่นที่มีฤทธิ์กัดกร่อนหรือมีฤทธิ์กัดกร่อนทําให้อายุการใช้งานของแปรงและแหวนลื่นลดลงอย่างรวดเร็วทําให้มอเตอร์กรงกระรอกเป็นที่ต้องการอย่างมาก ตรวจสอบสภาพการทํางานของมอเตอร์เทียบกับการจัดอันดับด้านสิ่งแวดล้อมของผู้ผลิตก่อนตัดสินใจเลือก
ละเลยข้อกําหนดการควบคุมความเร็วในอนาคต
การใช้งานความเร็วคงที่จํานวนมากในภายหลังต้องการความสามารถความเร็วตัวแปรเพื่อเพิ่มประสิทธิภาพพลังงานหรือการปรับปรุงกระบวนการ มอเตอร์กรงกระรอกรองรับการติดตั้งเพิ่มเติม VFD ด้วยการดัดแปลงเพียงเล็กน้อย ในขณะที่มอเตอร์โรเตอร์แบบบาดแผลมีเส้นทางการอัปเกรดที่จํากัด เมื่อแผนสิ่งอํานวยความสะดวกระยะยาวรวมถึงระบบอัตโนมัติที่อาจเกิดขึ้นหรือความคิดริเริ่มในการจัดการพลังงานการเลือกมอเตอร์กรงกระรอกจะให้ความยืดหยุ่นในอนาคตอันมีค่าแม้ว่าความต้องการในทันทีจะไม่ต้องการก็ตาม
8. คําถามที่พบบ่อย
ข้อได้เปรียบหลักของใบพัดกรงกระรอกเหนือใบพัดแผลคืออะไร?
ใบพัดกรงกระรอกให้ความน่าเชื่อถือที่สูงขึ้นอย่างมากและความต้องการการบํารุงรักษาที่ต่ํากว่า เนื่องจากโครงสร้างที่เรียบง่ายและทนทาน โดยไม่มีแปรง แหวนสลิป หรือการเชื่อมต่อภายนอก โดยทั่วไปแล้วจะมีประสิทธิภาพ 92-96% ในระดับประสิทธิภาพระดับพรีเมียม และต้องการการบํารุงรักษาทุกๆ 5,000-8,000 ชั่วโมงเท่านั้น (การหล่อลื่นแบริ่ง) เทียบกับ 1,000-2,000 ชั่วโมงสําหรับการเปลี่ยนแปรงโรเตอร์แบบบาดแผล สําหรับการใช้งานส่วนใหญ่ ส่งผลให้ต้นทุนรวมในการเป็นเจ้าของลดลง 50-70% ในช่วงอายุการใช้งาน 10-15 ปี
มอเตอร์โรเตอร์แบบบาดแผลสามารถให้แรงบิดเริ่มต้นได้ดีกว่ามอเตอร์กรงกระรอกที่มี VFD ได้หรือไม่
ไม่ VFD สมัยใหม่ที่ควบคุมมอเตอร์กรงกระรอกสามารถให้แรงบิดพิกัด 150% จากความเร็วศูนย์ในขณะที่จํากัดกระแสไฟไว้ที่ประมาณ 150% ของกระแสไฟที่กําหนด ซึ่งเท่ากับหรือเกินกว่าประสิทธิภาพการสตาร์ทโรเตอร์แบบบาดแผล วิธีการ VFD ยังให้ความแม่นยําในการควบคุมที่เหนือกว่า การเร่งความเร็วที่ราบรื่นขึ้น และขจัดการสูญเสียตัวต้านทานที่เกี่ยวข้องกับการสตาร์ทโรเตอร์แผล ใบพัดแบบบาดแผลยังคงมีข้อได้เปรียบเฉพาะในสถานการณ์การติดตั้งเพิ่มเติมด้วยโครงสร้างพื้นฐานที่มีอยู่หรือในกรณีที่ต้นทุนเงินทุน VFD เป็นสิ่งต้องห้ามสําหรับมอเตอร์ขนาดใหญ่มาก
ประสิทธิภาพเปรียบเทียบระหว่างโรเตอร์ทั้งสองประเภทที่โหลดเต็มที่อย่างไร
มอเตอร์กรงกระรอกประสิทธิภาพระดับพรีเมียม (การจําแนกประเภท IE3/IE4) ให้ประสิทธิภาพ 92-96% ที่โหลดพิกัด สูงกว่ามอเตอร์โรเตอร์แบบบาดแผลประมาณ 3-5 เปอร์เซ็นต์ (88-93%) เนื่องจากไม่มีการสูญเสียแหวนลื่นและแรงเสียดทานของแปรง ความแตกต่างของประสิทธิภาพนี้ประกอบขึ้นอย่างมากในการใช้งานต่อเนื่อง สําหรับมอเตอร์ 100 แรงม้าที่ทํางาน 8000 ชั่วโมงต่อปี มอเตอร์กรงกระรอกช่วยประหยัดค่าพลังงานได้ประมาณ 2,000-3,000 ดอลลาร์ต่อปีในอัตราค่าไฟฟ้าอุตสาหกรรมทั่วไป
มอเตอร์โรเตอร์แบบบาดแผลยังคงใช้ในการติดตั้งใหม่หรือไม่
มอเตอร์โรเตอร์แบบบาดแผลไม่ค่อยถูกระบุสําหรับการใช้งานทั่วไปแบบใหม่ เนื่องจากความพร้อมใช้งานอย่างแพร่หลายและประสิทธิภาพที่เหนือกว่าของมอเตอร์กรงกระรอกที่ควบคุมด้วย VFD อย่างไรก็ตาม ยังคงใช้งานได้สําหรับการใช้งานเฉพาะทาง เช่น มอเตอร์ขนาดใหญ่มาก (สูงกว่า 2,000 แรงม้า) ในโรงงานเหมืองแร่หรือปูนซีเมนต์ที่ต้องจํากัดกระแสไฟเริ่มต้นโดยไม่ต้องเสียค่าใช้จ่ายด้านทุนของ VFD กําลังสูง หรือในสถานการณ์การติดตั้งเพิ่มเติมที่โครงสร้างพื้นฐานของโรเตอร์บาดแผลที่มีอยู่สามารถใช้ประโยชน์จากเศรษฐกิจได้
ช่วงการควบคุมความเร็วใดที่ใช้งานได้จริงสําหรับมอเตอร์โรเตอร์แบบบาดแผลที่มีการควบคุมความต้านทาน
มอเตอร์โรเตอร์แบบบาดแผลพร้อมระบบควบคุมความต้านทานของโรเตอร์ทํางานได้จริงระหว่าง 50-100% ของความเร็วที่กําหนดสําหรับการทํางานเป็นระยะ ความเร็วต่ํากว่า 50% ประสิทธิภาพจะลดลงต่ํากว่า 60% เนื่องจากการสูญเสียการลื่นมากเกินไปทําให้การทํางานต่อเนื่องไม่สามารถทําได้ทางเศรษฐกิจ สําหรับการใช้งานที่ต้องการการทํางานบ่อยครั้งหรือต่อเนื่องด้วยความเร็วต่ํากว่า 70% มอเตอร์กรงกระรอกที่ควบคุมด้วย VFD ให้ประสิทธิภาพที่เหนือกว่ามาก (โดยทั่วไป 90-95% ที่ความเร็ว 70%) และควรระบุแทน
ข้อกําหนดในการบํารุงรักษาแหวนสลิปส่งผลต่อความน่าเชื่อถือของมอเตอร์โรเตอร์บาดแผลอย่างไร
แหวนสลิปและแปรงถ่านต้องได้รับการตรวจสอบทุกๆ 1,000-2,000 ชั่วโมงการทํางาน โดยโดยทั่วไปแล้วจําเป็นต้องเปลี่ยนแปรงทุกๆ 2,000-4,000 ชั่วโมง ขึ้นอยู่กับสภาพการทํางาน แหวนสลิปต้องเปลี่ยนพื้นผิวเป็นระยะทุกๆ 2-3 ปีเพื่อรักษาการสัมผัสที่เหมาะสม ค่าใช้จ่ายในการบํารุงรักษานี้เพิ่มความเสี่ยงในการหยุดทํางานที่ไม่ได้วางแผนไว้เมื่อเทียบกับมอเตอร์กรงกระรอก และต้องใช้ช่างเทคนิคที่ผ่านการฝึกอบรมซึ่งคุ้นเคยกับการปรับเสื้อผ้าแปรง ในการใช้งานที่สําคัญความแตกต่างของความน่าเชื่อถือนี้สนับสนุนมอเตอร์กรงกระรอกอย่างมาก
ฉันสามารถติดตั้ง VFD เข้ากับมอเตอร์โรเตอร์แบบบาดแผลได้หรือไม่
แม้ว่าจะเป็นไปได้ในทางเทคนิค แต่โดยทั่วไปไม่แนะนําให้ติดตั้ง VFD เพิ่มเติมกับมอเตอร์โรเตอร์ที่พันแผล ความต้านทานและความเหนี่ยวนําของโรเตอร์ที่สูงขึ้นของโรเตอร์แบบบาดแผลสร้างความท้าทายในการควบคุมสําหรับ VFD มาตรฐาน ซึ่งอาจทําให้เกิดความร้อนมากเกินไปและความสามารถในการบิดลดลง นอกจากนี้ แหวนสลิปและแปรงของมอเตอร์ที่มีอยู่ยังคงเป็นหนี้สินในการบํารุงรักษาโดยไม่ให้ประโยชน์ใดๆ ในการทํางานของ VFD แนวทางที่ประหยัดคือการเปลี่ยนมอเตอร์โรเตอร์แบบบาดแผลด้วยชุดกรงกระรอกที่ตรงกับการทํางานของ VFD อย่างเหมาะสม
พารามิเตอร์หลักที่ต้องตรวจสอบในเอกสารข้อมูลมอเตอร์ก่อนการเลือกคืออะไร
พารามิเตอร์ที่สําคัญ ได้แก่ กระแสโรเตอร์ล็อค (LRA) และแรงบิดของโรเตอร์ล็อค (LRT) สําหรับการวิเคราะห์เริ่มต้นประสิทธิภาพโหลดเต็มและตัวประกอบกําลังสําหรับการคํานวณต้นทุนการดําเนินงานปัจจัยการบริการสําหรับความจุเกินพิกัดและระดับฉนวนสําหรับขีดจํากัดการเพิ่มขึ้นของอุณหภูมิ สําหรับมอเตอร์โรเตอร์แบบบาดแผล ให้ตรวจสอบแรงดันไฟฟ้าของแหวนสลิปเพิ่มเติม และพิกัดกระแสไฟฟ้า ข้อมูลจําเพาะความต้านทานภายนอก และคําแนะนําเกรดแปรง ขอรายงานการทดสอบที่ผ่านการรับรองสําหรับมอเตอร์ที่มีกําลังสูงกว่า 50 แรงม้าเสมอ เพื่อตรวจสอบว่าประสิทธิภาพที่แท้จริงตรงกับการจัดอันดับแผ่นข้อมูล
สรุป
ทางเลือกระหว่างมอเตอร์เหนี่ยวนํากรงกระรอกและโรเตอร์แบบบาดแผลนั้นขึ้นอยู่กับข้อกําหนดในการสตาร์ทเฉพาะของแอปพลิเคชัน สําหรับการใช้งานในอุตสาหกรรมส่วนใหญ่ โดยเฉพาะไดรฟ์ความเร็วคงที่หรือการใช้งานแบบปรับความเร็วได้เมื่อจับคู่กับ VFD มอเตอร์กรงกระรอกให้ความน่าเชื่อถือ ประสิทธิภาพ และต้นทุนรวมในการเป็นเจ้าของที่เหนือกว่า โครงสร้างที่เรียบง่าย ทนทาน และความต้องการการบํารุงรักษาน้อยที่สุดทําให้เป็นตัวเลือกเริ่มต้นสําหรับโรงงานอุตสาหกรรมสมัยใหม่
มอเตอร์โรเตอร์แบบบาดแผลยังคงรักษาข้อได้เปรียบเฉพาะในการใช้งานที่ต้องการแรงบิดเริ่มต้นสูงโดยมีกระแสไฟจํากัด โดยเฉพาะอย่างยิ่งสําหรับมอเตอร์ขนาดใหญ่ (สูงกว่า 500 แรงม้า) ที่ต้นทุน VFD สูงเกินไป หรือในสถานการณ์การติดตั้งเพิ่มเติมด้วยโครงสร้างพื้นฐานของโรเตอร์บาดแผลที่มีอยู่ อย่างไรก็ตาม ความต้องการในการบํารุงรักษาที่สูงขึ้น ประสิทธิภาพที่ลดลง และเส้นทางการอัปเกรดที่จํากัดทําให้การแข่งขันลดลงเรื่อย ๆ เนื่องจากเทคโนโลยี VFD ก้าวหน้าและต้นทุนลดลง
เมื่อทําการเลือกขั้นสุดท้าย ให้จัดลําดับความสําคัญของการวิเคราะห์ที่ครอบคลุมของแรงบิดเริ่มต้นเทียบกับข้อกําหนดเริ่มต้นในปัจจุบัน ลักษณะรอบการทํางาน และต้นทุนการเป็นเจ้าของทั้งหมด 10 ปี แทนที่จะมุ่งเน้นไปที่ราคาซื้อเริ่มต้นเพียงอย่างเดียว สําหรับการใช้งานที่มีความไม่แน่นอนเกี่ยวกับข้อกําหนดในการควบคุมความเร็วในอนาคตมอเตอร์กรงกระรอกให้ความยืดหยุ่นสูงสุดสําหรับการติดตั้งเพิ่มเติมและการอัปเกรดในอนาคต
พร้อมที่จะระบุมอเตอร์ที่เหมาะสมที่สุดสําหรับการใช้งานของคุณแล้วหรือยัง ดาวน์โหลดแผ่นงานการเลือกมอเตอร์โดยละเอียดของเรา หรือติดต่อทีมวิศวกรแอปพลิเคชันของเราเพื่อขอความช่วยเหลือในการวิเคราะห์การเริ่มต้น การปรับขนาด VFD และการคํานวณต้นทุนรวมในการเป็นเจ้าของที่ปรับให้เหมาะกับความต้องการเฉพาะของคุณ