

พาวเวอร์ซัพพลายโหมดสวิตช์ (SMPS): คู่มือการเลือกและการออกแบบที่สมบูรณ์สําหรับวิศวกร
แหล่งจ่ายไฟโหมดสวิตช์ได้กลายเป็นกระดูกสันหลังของระบบอิเล็กทรอนิกส์สมัยใหม่ตั้งแต่อุปกรณ์สําหรับผู้บริโภคไปจนถึงระบบอัตโนมัติทางอุตสาหกรรม สําหรับวิศวกรออกแบบและทีมจัดซื้อที่ประเมินโซลูชันด้านพลังงาน การทําความเข้าใจเทคโนโลยี SMPS และการรู้วิธีเลือกโทโพโลยีที่เหมาะสมสําหรับแอปพลิเคชันของคุณส่งผลโดยตรงต่อประสิทธิภาพ ความน่าเชื่อถือ และต้นทุน
คู่มือนี้อธิบายพารามิเตอร์ทางเทคนิคที่สําคัญ แนะนําวิธีการเลือกตามข้อจํากัดในการออกแบบจริง และเน้นถึงข้อผิดพลาดทั่วไปที่อาจทําให้ประสิทธิภาพของ Power stage ของคุณตกราง ไม่ว่าคุณจะออกแบบอุปกรณ์อิเล็กทรอนิกส์ยานยนต์ โหนดเซ็นเซอร์ IoT หรือระบบควบคุมอุตสาหกรรม คุณจะพบข้อมูลเชิงลึกที่นําไปใช้ได้จริงเพื่อการตัดสินใจเกี่ยวกับแหล่งจ่ายไฟที่ดีขึ้น
สารบัญ
- [พาวเวอร์ซัพพลายโหมดสวิตช์คืออะไรและเหตุใดจึงสําคัญ] (#1-what-is-a-switch-mode-power-supply-and-why-it-matters)
- [อธิบายพารามิเตอร์ทางเทคนิคที่สําคัญ] (#2-key-technical-parameters-explained)
- [วิธีเลือกโทโพโลยี SMPS ที่เหมาะสมสําหรับแอปพลิเคชันของคุณ] (#3-how-how-to-choose-the-right-smps-topology-for-your-application)
- [การเปรียบเทียบประสิทธิภาพ: Buck, Boost, Buck-Boost และโทโพโลยีแบบแยก] (#4-performance-comparison-buck-boost-buck-boost-and-isolated-topologies)
- [ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไป] (#5-ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไป)
- [ข้อควรพิจารณาเกี่ยวกับห่วงโซ่อุปทานและการจัดหา] (#6-ข้อควรพิจารณาเกี่ยวกับห่วงโซ่อุปทานและการจัดหา)
- คําถามที่พบบ่อย
- [บทสรุปและขั้นตอนต่อไปที่แนะนํา] (#8 ข้อสรุปและขั้นตอนถัดไปที่แนะนํา)
1. พาวเวอร์ซัพพลายโหมดสวิตช์คืออะไรและเหตุใดจึงสําคัญ
แหล่งจ่ายไฟโหมดสวิตช์แปลงพลังงานไฟฟ้าอย่างมีประสิทธิภาพโดยการเปิดและปิดทรานซิสเตอร์กําลังที่ความถี่สูง ซึ่งแตกต่างจากตัวควบคุมเชิงเส้นที่กระจายแรงดันไฟฟ้าส่วนเกินเป็นความร้อนโทโพโลยี SMPS ถ่ายโอนพลังงานผ่านตัวเหนี่ยวนําและตัวเก็บประจุ โดยให้ประสิทธิภาพสูงกว่า 85% และมักจะเกิน 95% ในการออกแบบที่ปรับให้เหมาะสม
สําหรับวิศวกร ประสิทธิภาพนี้แปลเป็นความต้องการในการจัดการความร้อนที่ลดลง ฟอร์มแฟคเตอร์ที่เล็กลง และต้นทุนการดําเนินงานที่ลดลง ในการใช้งานที่ใช้พลังงานจากแบตเตอรี่ ประสิทธิภาพ SMPS จะขยายรันไทม์โดยตรง ในระบบอุตสาหกรรมที่ดึงพลังงานอย่างต่อเนื่องการปรับปรุงประสิทธิภาพจะช่วยลดการกระจายความร้อนและปรับปรุงความน่าเชื่อถือในระยะยาว
การแลกเปลี่ยนคือความซับซ้อน การออกแบบ SMPS ต้องการการเลือกส่วนประกอบอย่างระมัดระวัง วินัยเค้าโครง PCB และความสนใจต่อการรบกวนทางแม่เหล็กไฟฟ้า (EMI) ความผิดพลาดในการออกแบบ เช่น การชดเชยลูปที่ไม่เพียงพอหรือการจัดวางตัวเหนี่ยวนําที่ไม่ดี อาจทําให้เกิดความไม่เสถียร ระลอกคลื่นมากเกินไป หรือการปล่อยมลพิษที่นําไฟฟ้า/แผ่รังสีซึ่งล้มเหลวในการทดสอบตามกฎระเบียบ
2. อธิบายพารามิเตอร์ทางเทคนิคที่สําคัญ
เมื่อประเมินคอนโทรลเลอร์ SMPS หรือโมดูลในตัว ให้มุ่งเน้นไปที่พารามิเตอร์ที่ส่งผลโดยตรงต่อประสิทธิภาพ ความน่าเชื่อถือ และการปฏิบัติตามข้อกําหนดของการออกแบบของคุณ เอกสารข้อมูลมีข้อมูลจําเพาะหลายสิบรายการ แต่โดยทั่วไปแล้วข้อมูลจําเพาะเหล่านี้เป็นข้อมูลจําเพาะที่ขับเคลื่อนการตัดสินใจเลือก
ประสิทธิภาพและการสูญเสียพลังงาน
ประสิทธิภาพคืออัตราส่วนของกําลังขับต่อกําลังไฟฟ้าเข้า ซึ่งแสดงเป็นเปอร์เซ็นต์ tage. ตัวแปลงบั๊กแบบซิงโครนัสที่ทันสมัยมีประสิทธิภาพ 92-96% ที่โหลดกลาง ในขณะที่ตัวแปลงฟลายแบ็คในแอปพลิเคชันที่แยกได้โดยทั่วไปจะสูงถึง 80-88% การสูญเสียการสวิตชิ่ง การสูญเสียการนําไฟฟ้า และการสูญเสียเกทไดรฟ์ล้วนมีส่วนช่วยในการกระจายพลังงานทั้งหมด
ให้ความสนใจกับเส้นโค้งประสิทธิภาพตลอดช่วงโหลดเต็ม คอนโทรลเลอร์ SMPS จํานวนมากรักษาประสิทธิภาพสูงที่โหลดหนัก แต่ลดลงอย่างมากที่โหลดเบา เว้นแต่จะใช้การทํางานของโหมดข้ามพัลส์หรือโหมดระเบิด สําหรับการใช้งานแบตเตอรี่ที่มีโปรไฟล์โหลดแปรผัน ประสิทธิภาพการโหลดเบามีความสําคัญพอๆ กับประสิทธิภาพสูงสุด
ความถี่ในการสลับ
ความถี่การสลับมีผลต่อขนาดตัวเหนี่ยวนํา การเลือกตัวเก็บประจุ และลักษณะ EMI ความถี่ที่สูงขึ้น (สูงกว่า 1 MHz) ช่วยให้ส่วนประกอบแบบพาสซีฟมีขนาดเล็กลง ซึ่งช่วยลดขนาดโซลูชัน อย่างไรก็ตาม การสูญเสียการสลับจะเพิ่มขึ้นตามความถี่ และการบรรเทา EMI จะท้าทายมากขึ้น
ในการใช้งานยานยนต์และอุตสาหกรรมที่ต้องการการปฏิบัติตามข้อกําหนดการปล่อยมลพิษ (CISPR 25, CISPR 32) การเลือกความถี่เป็นการแลกเปลี่ยนการออกแบบที่สําคัญ การทํางานที่ต่ํากว่าย่านความถี่วิทยุ AM (530-1710 kHz) หรือสูงกว่า 2 MHz สามารถลดความยุ่งยากในการกรองได้ แต่ความพร้อมใช้งานของส่วนประกอบและข้อจํากัดด้านต้นทุนมักจะผลักดันการออกแบบให้อยู่ในช่วง 300-600 kHz
อินพุตและเอาต์พุต Voltage ช่วง
ตัวควบคุม SMPS ระบุแรงดันไฟฟ้าอินพุตต่ําสุดและสูงสุด และโทโพโลยีบางตัวกําหนดขีดจํากัดที่เข้มงวดเกี่ยวกับอัตราส่วนแรงดันไฟฟ้าอินพุตต่อเอาต์พุต ตัวแปลงบั๊กต้องใช้ Vin > Vout ตัวแปลงบูสต์ต้องใช้ Vout > Vin และโทโพโลยีบัคบูสต์หรือ SEPIC จัดการช่วงอินพุต-เอาต์พุตที่ทับซ้อนกันโดยแลกกับส่วนประกอบเพิ่มเติมและประสิทธิภาพที่ต่ํากว่าเล็กน้อย
ในการใช้งานยานยนต์ ช่วงแรงดันไฟฟ้าอินพุตต้องรองรับข้อเหวี่ยงเย็น (ต่ําถึง 3.5V) การทํางานปกติ (9-16V) และโหลดดัมพ์ชั่วคราว (สูงสุด 40V) ระบบอุตสาหกรรมบนราง 24V ต้องทนต่อการเปลี่ยนแปลง ±20% ตรวจสอบเสมอว่าช่วงการทํางานของคอนโทรลเลอร์ครอบคลุมชั่วคราวในกรณีที่เลวร้ายที่สุดของคุณ ไม่ใช่แค่ปริมาตรเล็กน้อย tage.
การควบคุมโหลดและการควบคุมสาย
การควบคุมโหลดระบุว่าปริมาณแรงดันขาออกเปลี่ยนแปลงไปมากน้อยเพียงใดเนื่องจากกระแสโหลดแตกต่างกันไปจากต่ําสุดถึงสูงสุด การควบคุมสายระบุการแปรผันของแรงดันขาออกเมื่อแรงดันไฟฟ้าขาเข้าเปลี่ยนไป แอปพลิเคชันประสิทธิภาพสูงต้องการการควบคุมที่เข้มงวด ซึ่งโดยทั่วไปจะต่ํากว่า 1% สําหรับตัวชี้วัดทั้งสอง
พารามิเตอร์เหล่านี้ได้รับอิทธิพลจากการออกแบบลูปป้อนกลับ ความแม่นยําในการอ้างอิง และอิมพีแดนซ์เอาต์พุต หากแอปพลิเคชันของคุณมีข้อกําหนดด้านความทนทานต่อแรงดันไฟฟ้าที่เข้มงวด เช่น การจ่ายไฟให้กับ ADC ที่มีความแม่นยําหรือส่วนหน้า RF ให้ตรวจสอบว่าประสิทธิภาพการควบคุมของคอนโทรลเลอร์ SMPS ตรงกับความต้องการของคุณโดยไม่ต้องมีกฎระเบียบเพิ่มเติม
การตอบสนองชั่วคราว
การตอบสนองชั่วคราวอธิบายว่า SMPS ฟื้นตัวจากการเปลี่ยนแปลงโหลดอย่างกะทันหันได้เร็วเพียงใด มีความสําคัญในแอปพลิเคชันที่มีโหลดแบบพัลซิ่ง เช่น ตัวรับส่งสัญญาณไร้สายที่สลับระหว่างโหมดสลีปและโหมดส่งสัญญาณ หรือโปรเซสเซอร์ที่บล็อกการดําเนินการประตูนาฬิกา การตอบสนองชั่วคราวที่ไม่ดีทําให้เกิดแรงดันไฟฟ้าลดลงหรือโอเวอร์ชูตซึ่งอาจทําให้เกิดการรีเซ็ตไฟดับหรือทําให้วงจรที่ละเอียดอ่อนเสียหาย
การออกแบบเครือข่ายค่าตอบแทนส่งผลโดยตรงต่อการตอบสนองชั่วคราว คอนโทรลเลอร์ที่มีการควบคุมโหมดตรงเวลาหรือแรงดันไฟฟ้าแบบปรับได้อาจต้องใช้กลยุทธ์การชดเชยที่แตกต่างจากคอนโทรลเลอร์โหมดปัจจุบัน เมื่อเลือก SMPS ให้ตรวจสอบส่วนประกอบการชดเชยที่แนะนําของแผ่นข้อมูล และตรวจสอบประสิทธิภาพชั่วคราวภายใต้เงื่อนไขขั้นตอนการโหลดที่คาดไว้
| พารามิเตอร์ | ช่วงทั่วไป | ผลกระทบต่อการออกแบบ | Synology Inc. |---|---|---| | ประสิทธิภาพ (โหลดเต็ม) | 85-96% | 85-96% | การจัดการความร้อน อายุการใช้งานแบตเตอรี่ | | ความถี่การสลับ | 200 kHz - 2 MHz | 200 กิโลเฮิรตซ์ ขนาดส่วนประกอบ ความซับซ้อนในการกรอง EMI | MISUMI | ช่วงแรงดันไฟฟ้าขาเข้า | เฉพาะการใช้งาน | การเลือกโทโพโลยี การป้องกันชั่วคราว | | ความแม่นยําของแรงดันขาออก | ±1% ถึง ±5% | ข้อกําหนดหลังการกํากับดูแล โหลดที่ละเอียดอ่อน | | โหลดการตอบสนองชั่วคราว | Syntu 10-100 ไมโครวินาที | ความจุจํานวนมาก เครือข่ายการชดเชย | | กระแสนิ่ง | 10 μA - 5 mA | 10 ไมโครแอมป์ - 5 มิลลิแอมป์ อายุการใช้งานสแตนด์บายแบตเตอรี่ ประสิทธิภาพการโหลดเบา | ThaiThailand | อุณหภูมิในการทํางาน | -40°C ถึง +125°C | คุณสมบัติยานยนต์/อุตสาหกรรม |
ตารางนี้สรุปพารามิเตอร์ที่ใช้บ่อยที่สุดในการตัดสินใจเลือก SMPS จัดลําดับความสําคัญของพารามิเตอร์ตามข้อจํากัดของแอปพลิเคชันของคุณ—อายุการใช้งานแบตเตอรี่สําหรับอุปกรณ์พกพาประสิทธิภาพการระบายความร้อนสําหรับระบบความหนาแน่นสูงการตอบสนองชั่วคราวสําหรับแอปพลิเคชัน RF
3. วิธีเลือกโทโพโลยี SMPS ที่เหมาะสมสําหรับแอปพลิเคชันของคุณ
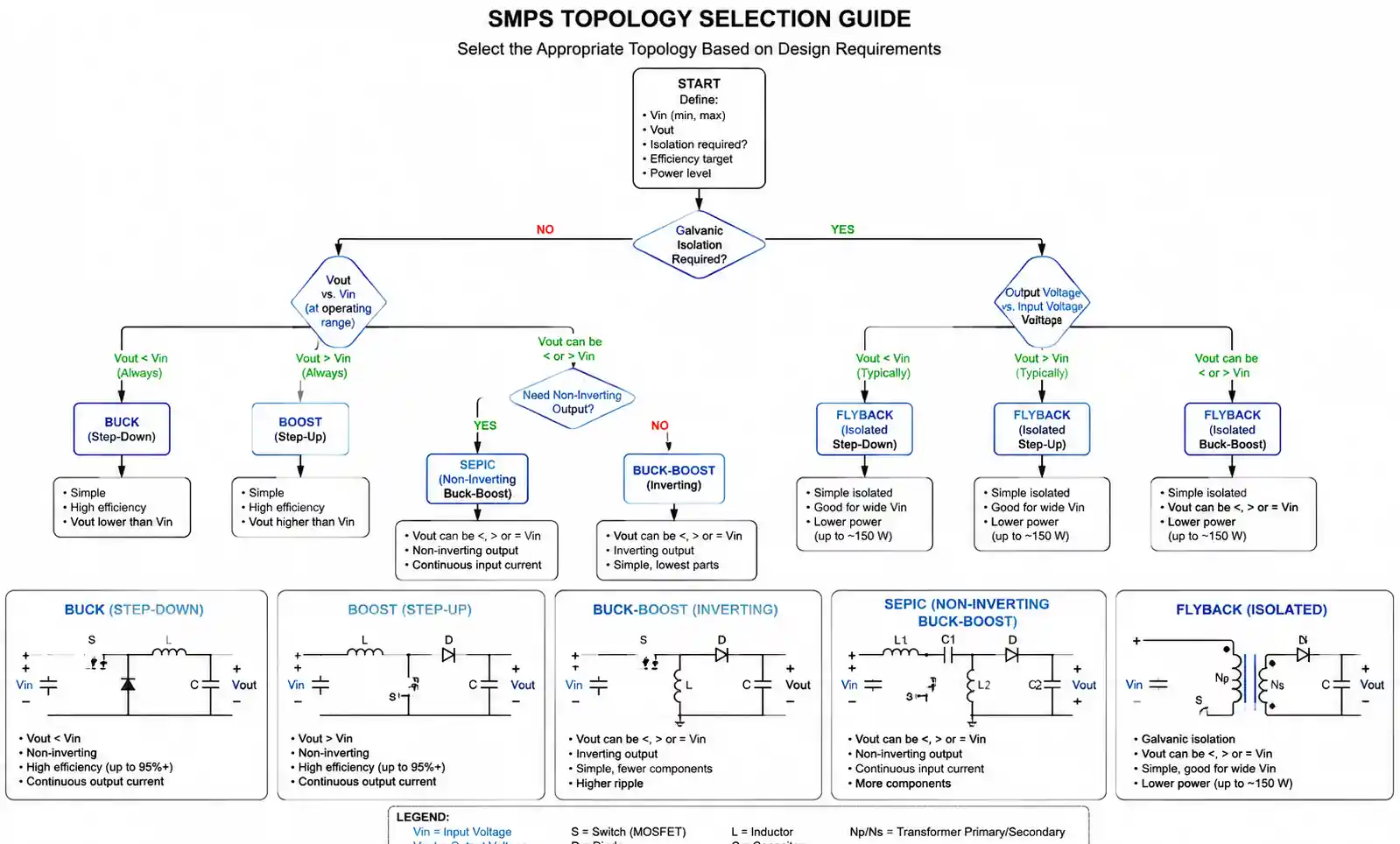
การเลือกโทโพโลยี SMPS เริ่มต้นด้วยช่วงแรงดันไฟฟ้าขาเข้า แรงดันขาออกที่ต้องการ กระแสโหลด และข้อกําหนดในการแยก ไม่มีโทโพโลยีเดียวที่เพิ่มประสิทธิภาพทุกแอปพลิเคชัน ดังนั้นกระบวนการคัดเลือกจึงเกี่ยวข้องกับการแลกเปลี่ยนระหว่างประสิทธิภาพ ต้นทุน จํานวนส่วนประกอบ และความซับซ้อนในการออกแบบ
ขั้นตอนที่ 1: กําหนดความสัมพันธ์ของแรงดันไฟฟ้าอินพุต-เอาต์พุต
หากแรงดันขาออกของคุณต่ํากว่าแรงดันไฟฟ้าอินพุตขั้นต่ําเสมอ ตัวแปลงบั๊ก (สเต็ปดาวน์) เป็นตัวเลือกตามธรรมชาติ หากเอาต์พุตต้องสูงกว่าอินพุต ให้ใช้ตัวแปลงบูสต์ (สเต็ปอัพ) เมื่อแรงดันไฟฟ้าอินพุตและเอาต์พุตทับซ้อนกัน หรือเมื่ออินพุตอาจสูงหรือต่ํากว่าเอาต์พุต ให้พิจารณาโทโพโลยี buck-boost, SEPIC หรือ Cuk
สําหรับการใช้งานที่ต้องการการแยกไฟฟ้าเช่นตัวแปลง AC-DC อุปกรณ์ทางการแพทย์หรือระบบที่มีข้อกังวลเกี่ยวกับกราวด์ลูปจําเป็นต้องมีโทโพโลยีแบบแยกเช่นตัวแปลงเรโซแนนซ์ฟลายแบ็คไปข้างหน้าหรือ LLC การแยกเพิ่มความซับซ้อนและค่าใช้จ่าย ดังนั้นให้ระบุเฉพาะเมื่อมาตรฐานความปลอดภัยหรือสถาปัตยกรรมระบบต้องการเท่านั้น
ขั้นตอนที่ 2: ประเมินข้อกําหนดด้านประสิทธิภาพ
หากแอปพลิเคชันของคุณต้องการประสิทธิภาพสูงสุดที่สูงกว่า 90% โดยทั่วไปแล้วจําเป็นต้องมีการแก้ไขแบบซิงโครนัส ตัวแปลงบั๊กแบบซิงโครนัสแทนที่ไดโอดอิสระด้วย MOSFET RDS(on) ต่ํา ซึ่งช่วยลดการสูญเสียการนําไฟฟ้า นี่เป็นมาตรฐานในอุปกรณ์ที่ใช้พลังงานจากแบตเตอรี่ แหล่งจ่ายไฟของศูนย์ข้อมูล และแอปพลิเคชันใดๆ ที่มีข้อจํากัดด้านความร้อนจํากัดการกระจายพลังงาน
สําหรับการออกแบบที่อ่อนไหวต่อต้นทุนซึ่งยอมรับประสิทธิภาพในช่วง 80-85% โทโพโลยีแบบอะซิงโครนัส (แบบไดโอด) จะลดจํานวนส่วนประกอบและลดความซับซ้อนของเค้าโครง PCB นี่เป็นเรื่องปกติในแหล่งจ่ายไฟเสริม รางอคติ และระบบอุตสาหกรรมที่ใช้พลังงานต่ํา
ขั้นตอนที่ 3: พิจารณาขนาดส่วนประกอบและพื้นที่ PCB
ความถี่การสลับส่งผลโดยตรงต่อขนาดส่วนประกอบแบบพาสซีฟ การทํางานที่ 1-2 MHz ช่วยให้ตัวเหนี่ยวนํา 1-2 μH ในแพ็คเกจขนาดกะทัดรัด ในขณะที่การออกแบบ 200-400 kHz ต้องใช้ตัวเหนี่ยวนํา 4-10 μH ความถี่ที่สูงขึ้นจะลดขนาดแม่เหล็ก แต่เพิ่มการสูญเสียการสลับและข้อกําหนดในการกรอง EMI
ในการออกแบบที่มีพื้นที่จํากัด เช่น อุปกรณ์สวมใส่ เซ็นเซอร์ IoT อุปกรณ์ทางการแพทย์แบบพกพา โมดูลพลังงานแบบบูรณาการที่รวมคอนโทรลเลอร์ MOSFET และตัวเหนี่ยวนําไว้ในแพ็คเกจเดียวให้รอยเท้าที่เล็กที่สุด การแลกเปลี่ยนคือความยืดหยุ่นที่ลดลงในการเพิ่มประสิทธิภาพหรือการตอบสนองชั่วคราว
ขั้นตอนที่ 4: ประเมิน EMI และความไวต่อเสียงรบกวน
ตัวแปลงโหมดสวิตช์สร้างสัญญาณรบกวนความถี่สูงที่สามารถจับคู่เข้ากับวงจรแอนะล็อกที่ละเอียดอ่อน ส่วนหน้า RF หรือระบบการวัดที่แม่นยํา หากการออกแบบของคุณมี ADC ที่มีความละเอียดสูงกว่า 12 บิต แอมพลิฟายเออร์เสียงรบกวนต่ํา หรือตัวรับส่งสัญญาณ RF สัญญาณรบกวนที่นําและแผ่ออกมาจาก SMPS อาจทําให้ความสมบูรณ์ของสัญญาณลดลง
กลยุทธ์การบรรเทาผลกระทบ ได้แก่ การตอกบัตรสเปรดสเปกตรัม (การเบี่ยงเบนความถี่เพื่อลดการปล่อยสูงสุด) การทํางานแบบซิงโครนัส (การตอกบัตรตัวแปลงหลายตัวจากแหล่งทั่วไปเพื่อหลีกเลี่ยงความถี่จังหวะ) และการจัดวาง PCB อย่างระมัดระวังด้วยระนาบกราวด์และการแยกส่วนที่เหมาะสม แอปพลิเคชันบางอย่างต้องการการควบคุมหลังด้วยตัวควบคุมเชิงเส้นแบบดรอปเอาต์ต่ําเพื่อแยกขั้นตอนอะนาล็อกที่ละเอียดอ่อนออกจากระลอกคลื่น SMPS
| ประเภทการใช้งาน | โทโพโลยีที่แนะนํา | ลําดับความสําคัญของการออกแบบที่สําคัญ |
|---|---|---|
| อุปกรณ์ IoT ที่ใช้พลังงานจากแบตเตอรี่ (อินพุต 3.7V, เอาต์พุต 3.3V) | บั๊กซิงโครนัส | ประสิทธิภาพโหลดเบา กระแสไฟนิ่ง |
| รางยานยนต์ 12V เป็น USB 5V (ข้อเหวี่ยงเย็นเพื่อถ่ายโอนข้อมูล) | MISUMI AG บั๊กซิงโครนัสพร้อม Vin กว้าง | การป้องกันชั่วคราว ประสิทธิภาพ |
| เครื่องชาร์จแบตเตอรี่ (อินพุต 5V, Li-ion 4.2V) | บั๊กหรือเชิงเส้น (ถ้าความร้อนยอมรับได้) | ความแม่นยําในการชาร์จ |
| อะแดปเตอร์ AC-DC แบบแยก (85-265 VAC ถึง 12V DC) | MISUMI ประเทศไทย ฟลายแบ็ค | การแยกความปลอดภัย ค่าใช้จ่าย |
| Boost สําหรับไฟแบ็คไลท์ LED (3.3V ถึง 24V) | บูสต์แบบซิงโครนัส | แรงดันขาออกสูง ประสิทธิภาพ |
| เอาต์พุตคู่ 24V ถึง 12V/5V อุตสาหกรรม | ซิงโครนัสบั๊ก + LDO หรือบั๊ก + บั๊ก | ประสิทธิภาพ การควบคุมโหลด |
| อุปกรณ์ทางการแพทย์ (แยก รั่วซึมต่ํา) | ฟลายแบ็คหรือไปข้างหน้าแบบแยก การปฏิบัติตามข้อกําหนดด้านความปลอดภัย กระแสไฟรั่ว |
เมทริกซ์การเลือกนี้แสดงตัวเลือกโทโพโลยีทั่วไปสําหรับการใช้งานทั่วไป ใช้เป็นจุดเริ่มต้น จากนั้นปรับแต่งตามข้อกําหนดด้านประสิทธิภาพ เป้าหมายต้นทุน และข้อจํากัดด้านกฎระเบียบที่เฉพาะเจาะจง
4. การเปรียบเทียบประสิทธิภาพ: โทโพโลยี Buck, Boost, Buck-Boost และ Isolated
โทโพโลยี SMPS แต่ละตัวมีจุดแข็งและข้อจํากัดเฉพาะตัว การทําความเข้าใจการแลกเปลี่ยนเหล่านี้จะช่วยให้คุณจับคู่โทโพโลยีกับข้อกําหนดของแอปพลิเคชันและหลีกเลี่ยงวิศวกรรมที่มากเกินไป
ตัวแปลงบั๊ก (สเต็ปดาวน์)
ตัวแปลงบั๊กลดแรงดันไฟฟ้าขาเข้าเป็นแรงดันขาออกที่ต่ํากว่าด้วยประสิทธิภาพทั่วไป 90-95% ในการออกแบบแบบซิงโครนัส ข้อดี ได้แก่ การควบคุมที่ง่าย พฤติกรรมที่คาดเดาได้ และการชดเชยที่ตรงไปตรงมา ข้อเสียรวมถึงข้อกําหนดที่ Vin > Vout ตลอดเวลา และความไวต่อแรงดันไฟฟ้าขาเข้าชั่วคราว
ดีที่สุดสําหรับ: อุปกรณ์ที่ใช้พลังงานจากแบตเตอรี่, การควบคุมจุดโหลด, การจ่ายไฟให้กับลอจิกดิจิทัลจากรางไฟฟ้าแรงสูง
ตัวแปลง Boost (Step-Up)
ตัวแปลงบูสต์เพิ่มแรงดันไฟฟ้าด้วยประสิทธิภาพใกล้เคียงกับตัวแปลงบั๊ก แต่กระแสไฟขาออกต่ํากว่ากระแสไฟเข้า ตัวแปลงบูสต์มีศูนย์ครึ่งระนาบขวาในฟังก์ชันการถ่ายโอนทําให้การชดเชยลูปซับซ้อนและจํากัดการตอบสนองชั่วคราว โทโพโลยี Boost ไม่สามารถจํากัดกระแสไฟเข้าเมื่อเริ่มต้นได้หากไม่มีส่วนประกอบเพิ่มเติม
ดีที่สุดสําหรับ: ไดรเวอร์ LED, ระบบสํารองแบตเตอรี่, การสร้างแรงดันไบแอสที่สูงกว่าแหล่งจ่ายไฟเข้า
ตัวแปลง Buck-Boost และ SEPIC
โทโพโลยี Buck-boost, SEPIC และ Cuk สามารถเพิ่มหรือลดแรงดันไฟฟ้าได้ จึงเหมาะอย่างยิ่งเมื่อช่วงแรงดันไฟฟ้าขาเข้าข้ามแรงดันไฟฟ้าขาออก การแลกเปลี่ยนคือจํานวนส่วนประกอบที่เพิ่มขึ้น (ตัวเหนี่ยวนําสองตัวใน SEPIC/Cuk หรือความเค้นกระแสของตัวเหนี่ยวนําที่สูงขึ้นใน buck-boost) ประสิทธิภาพที่ต่ํากว่าเล็กน้อย และการออกแบบแม่เหล็กที่ซับซ้อนมากขึ้น
ดีที่สุดสําหรับ: การใช้งานยานยนต์ที่มีรูปแบบอินพุตที่หลากหลายการแปลง Li-ion เซลล์เดียวเป็น 5V ระบบที่แรงดันไฟฟ้าของแหล่งสัญญาณเข้าไม่แน่นอน
Flyback Converter (แยก)
Flyback เป็นโทโพโลยีแบบแยกที่พบบ่อยที่สุดสําหรับระดับพลังงานต่ําถึงปานกลาง (ต่ํากว่า 100W) ให้การแยกไฟฟ้าด้วยส่วนประกอบแม่เหล็กเดียว (ตัวเหนี่ยวนํา/หม้อแปลงคู่) แต่โดยทั่วไปประสิทธิภาพจะอยู่ที่ 80-88% และการกระเพื่อมของเอาต์พุตจะสูงกว่าตัวแปลงที่ไม่แยก ตัวแปลงฟลายแบ็คต้องการการออกแบบหม้อแปลงอย่างระมัดระวังและวงจร snubber เพื่อจัดการการเหนี่ยวนําการรั่วไหล
ดีที่สุดสําหรับ: อะแดปเตอร์ AC-DC, อุปกรณ์อคติแบบแยก, อุปกรณ์ทางการแพทย์ที่ต้องการการแยกความปลอดภัย
| โทโพโลยี | ประสิทธิภาพ (ทั่วไป) | จํานวนส่วนประกอบ | ความซับซ้อน | การแยกตัว | กรณีการใช้งานที่ดีที่สุด | 2022 |---|---|---|---|---|---| | ซิงโครนัสบั๊ก | 92-96% | 92-96% | 92-96% | 92-96 ต่ํา | ต่ํา | ไม่ | ใช้พลังงานจากแบตเตอรี่ ณ จุดโหลด | | บั๊กแบบอะซิงโครนัส | 85-90% | 85-90% | ต่ํามาก | ต่ํามาก | ไม่ | รางเสริมที่ไวต่อต้นทุน | | บูสต์แบบซิงโครนัส | Synchronous Boost 90-95% | 90-95% | 90-95% ต่ํา | ปานกลาง | ไม่ | ไดรเวอร์ LED, แบตเตอรี่สํารอง | | บัคบูสต์ | 85-92% | 85-92% | ปานกลาง | ปานกลาง | ไม่ | ช่วงแรงดันไฟฟ้าอินพุตกว้าง | | SEPIC | ซีปิค 85-90% | 85-90% | ปานกลาง | ปานกลาง | ไม่ | วินข้าม Vout | | ฟลายแบ็ค (แยก) | 80-88% | 80-88% | 800 ปานกลาง | สูง | ใช่ | AC-DC อคติที่แยกได้ทางการแพทย์ | ไปข้างหน้า (แยก) | 85-90% | 85-90% | สูง | สูง | ใช่ | พลังงานที่สูงขึ้น หลายเอาต์พุต |
ตารางเปรียบเทียบนี้เน้นการแลกเปลี่ยนหลักระหว่างโทโพโลยี SMPS ทั่วไป เลือกตามเป้าหมายประสิทธิภาพเฉพาะ ข้อจํากัดด้านต้นทุน และข้อกําหนดในการแยก แทนที่จะถือว่าโทโพโลยีหนึ่งตัวเหนือกว่าในระดับสากล
5. ข้อควรพิจารณาในการออกแบบและข้อผิดพลาดทั่วไป
แม้จะมีโทโพโลยีและ IC คอนโทรลเลอร์ที่เหมาะสม แต่การออกแบบ SMPS ก็ล้มเหลวหรือทํางานได้ไม่ดีเนื่องจากข้อผิดพลาดที่ป้องกันได้ในการเลือกส่วนประกอบ เค้าโครง PCB และการชดเชยลูป นี่คือปัญหาที่พบบ่อยที่สุดในการตรวจสอบการออกแบบและการวิเคราะห์ความล้มเหลว
ข้อผิดพลาดในการเลือกตัวเหนี่ยวนํา
การเลือกตัวเหนี่ยวนําตามค่าความเหนี่ยวนําและพิกัดกระแสไฟฟ้าเท่านั้นไม่เพียงพอ กระแสอิ่มตัว (Isat) ต้องเกินกระแสเหนี่ยวนําสูงสุดที่มีระยะขอบ และความต้านทานกระแสตรง (DCR) ส่งผลโดยตรงต่อประสิทธิภาพ ในการออกแบบกระแสไฟสูง ความแตกต่าง 10 mΩ ใน DCR สามารถมีประสิทธิภาพ 1-2%
วัสดุหลักมีความสําคัญต่อการทํางานความถี่สูง แกนเฟอร์ไรต์ทํางานได้ดีสูงกว่า 500 kHz ในขณะที่แกนเหล็กแบบผงจะดีกว่าสําหรับความถี่ที่ต่ํากว่า แต่มีการสูญเสียแกนสูงกว่า ตัวเหนี่ยวนําที่มีฉนวนหุ้มช่วยลด EMI ที่แผ่รังสี แต่มีราคาสูงกว่าและอาจมีกระแสอิ่มตัวต่ํากว่าชนิดที่ไม่มีฉนวนหุ้ม ตรวจสอบประสิทธิภาพของตัวเหนี่ยวนําที่ความถี่และอุณหภูมิในการทํางานของคุณเสมอ
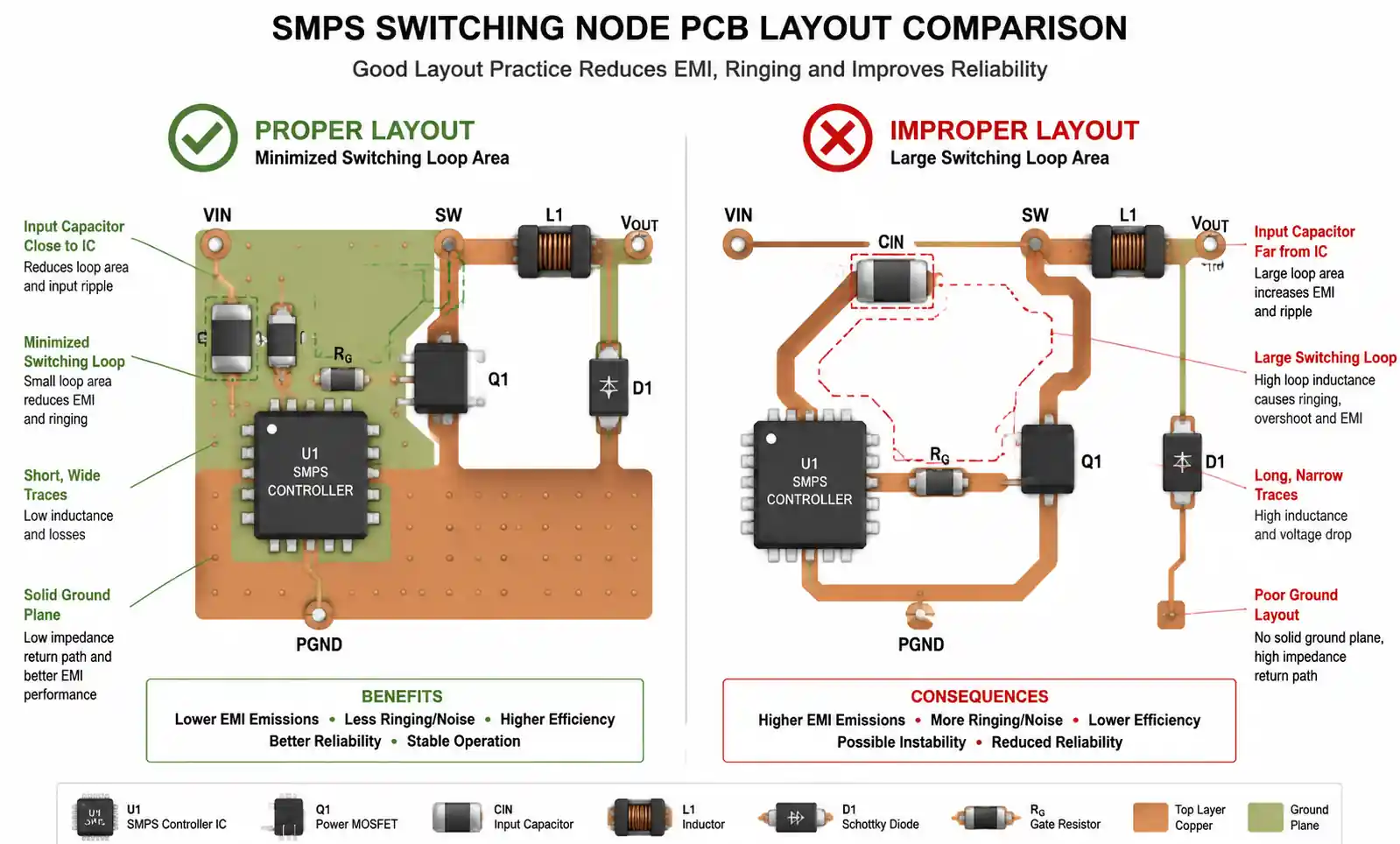
ข้อผิดพลาดของเค้าโครง PCB
ข้อผิดพลาดในการจัดวาง SMPS PCB เป็นสาเหตุหลักของเสียงรบกวน ความไม่เสถียร และความล้มเหลวของ EMI โหนดสวิตชิ่ง—การเชื่อมต่อระหว่างทรานซิสเตอร์สวิตช์ ตัวเหนี่ยวนํา และไดโอดอิสระหรือ FET แบบซิงโครนัส—มีกระแสไฟ di/dt สูงและต้องลดพื้นที่ให้เล็กที่สุด ลูปโหนดสวิตชิ่งขนาดใหญ่ทําหน้าที่เป็นเสาอากาศ แผ่สัญญาณรบกวนและเชื่อมต่อเข้ากับวงจรที่ละเอียดอ่อน
วางตัวเก็บประจุอินพุตและเอาต์พุตให้ใกล้กับพินไฟ IC มากที่สุด ใช้ระนาบกราวด์ แต่อย่าใช้กระแสสลับความถี่สูงผ่านร่องรอยแคบหรือระนาบกราวด์แยก อุทิศพื้นที่ระนาบกราวด์ที่มั่นคงสําหรับส่วนประกอบสเตจพลังงาน และเชื่อมต่อข้อเสนอแนะแบบอะนาล็อกและวงจรควบคุมกับจุดกราวด์ที่เงียบ (โดยทั่วไปคือขั้วลบของตัวเก็บประจุเอาต์พุต)
ความจุอินพุต/เอาต์พุตไม่เพียงพอ
ตัวเก็บประจุอินพุตต้องจัดการกับกระแสกระเพื่อม RMS ของตัวแปลง ซึ่งอาจมีนัยสําคัญในตัวแปลงบั๊ก แนะนําให้ใช้ตัวเก็บประจุเซรามิก (X5R หรือ X7R) ที่มี ESR ต่ํา แต่อาจต้องใช้ตัวเก็บประจุหลายตัวแบบขนานเพื่อให้เป็นไปตามพิกัดกระแสกระเพื่อม การประเมินกระแสกระเพื่อมต่ําเกินไปทําให้เกิดความล้มเหลวของตัวเก็บประจุก่อนเวลาอันควรและการกระเพื่อมของแรงดันไฟฟ้าอินพุตที่เพิ่มขึ้น
ความจุเอาต์พุตตั้งค่าการกระเพื่อมของแรงดันขาออกและการตอบสนองชั่วคราว ในการใช้งานที่มีการโหลดชั่วคราวที่รวดเร็วความจุจํานวนมากต้องเพียงพอที่จะจ่ายกระแสโหลดในระหว่างเวลาตอบสนองของลูปป้อนกลับ ตัวเก็บประจุแบบอิเล็กโทรไลต์แทนทาลัมหรือพอลิเมอร์ให้ความหนาแน่นของความจุสูงกว่าเซรามิก แต่ดู ESR และ ESL ที่ความถี่สูง
ข้อผิดพลาดในการชดเชยลูป
โดยทั่วไปตัวควบคุม SMPS จะทํางานในโหมดแรงดันไฟฟ้าหรือการควบคุมโหมดปัจจุบัน ซึ่งแต่ละตัวต้องการกลยุทธ์การชดเชยที่แตกต่างกัน ระยะขอบเฟสไม่เพียงพอ (น้อยกว่า 45 องศา) ทําให้เกิดเสียงกริ่งและความไม่เสถียรที่อาจเกิดขึ้น ระยะขอบเฟสที่มากเกินไป (มากกว่า 70 องศา) ให้การตอบสนองชั่วคราวที่เฉื่อยชา
วิศวกรหลายคนพึ่งพาการออกแบบอ้างอิงแผ่นข้อมูลโดยไม่ตรวจสอบความเสถียรของลูปภายใต้สภาวะการทํางานเฉพาะ แรงดันไฟฟ้าขาออก กระแสโหลด และแม้แต่ปรสิต PCB ส่งผลต่อพลวัตของลูป สําหรับการออกแบบการผลิต ให้วัดการตอบสนองของลูปด้วยเครื่องวิเคราะห์เครือข่ายหรือทําการทดสอบโหลดชั่วคราวเพื่อตรวจสอบระยะขอบความเสถียร
| หลุมพรางทั่วไป | ผลที่ตามมา | การบรรเทาผลกระทบ |
|---|---|---|
| ความอิ่มตัวของตัวเหนี่ยวนําที่กระแสไฟสูงสุด | การสูญเสียประสิทธิภาพ ความร้อนสูงเกินไป ความเสียหายที่อาจเกิดขึ้น | เลือก Isat > กระแสเหนี่ยวนําสูงสุด 1.3× |
| พื้นที่ลูปโหนดสวิตชิ่งขนาดใหญ่ | EMI ที่แผ่รังสี, ครอสทอล์ค | ลดพื้นที่ลูป ใช้ระนาบกราวด์ |
| พิกัดกระแสกระเพื่อมของตัวเก็บประจุอินพุตไม่เพียงพอ ตัวเก็บประจุร้อนเกินไป รวมกระแสระลอกคลื่น RMS หลายตัวพิมพ์ใหญ่แบบขนาน | ||
| การกําหนดเส้นทางการติดตามข้อเสนอแนะไม่ดี การฉีดเสียงรบกวน ความไม่เสถียร | เส้นทางการติดตามข้อเสนอแนะออกจากโหนดสวิตชิ่ง | Synus Thailand |
| ละเว้นการออกแบบระบายความร้อน | คอนโทรลเลอร์หรือ MOSFET ร้อนเกินไป | MISUMI คํานวณการกระจายพลังงาน |
| การทดสอบชั่วคราวแบบข้ามโหลด | Synology Inc. ความไม่เสถียรภายใต้สภาวะโหลดจริง ทดสอบด้วยโหลดแบบไดนามิกตรวจสอบความเบี่ยงเบนของแรงดันไฟฟ้า |
ตารางนี้แสดงข้อผิดพลาดในการออกแบบที่พบบ่อยที่สุดและผลที่ตามมา จัดการกับสิ่งเหล่านี้อย่างเป็นระบบในระหว่างการตรวจสอบการออกแบบเพื่อหลีกเลี่ยงการรีสปินบอร์ดที่มีค่าใช้จ่ายสูงหรือความล้มเหลวของภาคสนาม
6. ข้อควรพิจารณาเกี่ยวกับห่วงโซ่อุปทานและการจัดหา
ไอซีการจัดการพลังงานและส่วนประกอบแบบพาสซีฟสําหรับการออกแบบ SMPS ต้องเผชิญกับความท้าทายในห่วงโซ่อุปทานที่อาจส่งผลกระทบต่อไทม์ไลน์และต้นทุนของโครงการ กลยุทธ์การจัดหาเชิงรุกและแนวทางปฏิบัติในการออกแบบเพื่อความพร้อมใช้งานช่วยลดความเสี่ยง
ความพร้อมใช้งานของ IC คอนโทรลเลอร์และระยะเวลารอคอยสินค้า
ไอซีการจัดการพลังงานปริมาณมากจากซัพพลายเออร์รายใหญ่ (Texas Instruments, Analog Devices, Infineon, ON Semiconductor) มักจะมีความพร้อมใช้งานที่ดีกว่าชิ้นส่วนเฉพาะกลุ่มหรือแหล่งเดียว ในช่วงที่ส่วนประกอบขาดแคลน ระยะเวลารอคอยสินค้าสําหรับตัวควบคุม SMPS แบบพิเศษอาจขยายได้ถึง 26-52 สัปดาห์
ออกแบบด้วยตัวเลือกแหล่งที่สองเมื่อเป็นไปได้ ตัวควบคุมบั๊กและบูสต์จํานวนมากมีทางเลือกที่เข้ากันได้กับพินหรือเทียบเท่าในการทํางาน หากการออกแบบของคุณใช้ชิ้นส่วนจากแหล่งเดียว ให้รักษาบัฟเฟอร์สินค้าคงคลังให้สูงขึ้นหรือระบุการเปลี่ยนทดแทนแบบดรอปอินในช่วงต้นของวงจรการออกแบบ
การจัดหาส่วนประกอบแบบพาสซีฟ
ตัวเหนี่ยวนํามักเป็นส่วนประกอบ SMPS ที่มีข้อจํากัดด้านอุปทานมากที่สุด โดยเฉพาะอย่างยิ่งในการจัดอันดับเกรดยานยนต์หรือกระแสสูง แม่เหล็กแบบกําหนดเองมีระยะเวลารอคอยสินค้านานกว่าชิ้นส่วนแคตตาล็อก สร้างมาตรฐานเกี่ยวกับตัวเหนี่ยวนําจากซัพพลายเออร์หลายราย (Coilcraft, Wurth, TDK, Murata) เพื่อรักษาความยืดหยุ่นในการจัดหา
ตัวเก็บประจุเซรามิกที่มีพิกัดแรงดันไฟฟ้าเฉพาะและค่าความจุในขนาดเคสขนาดกะทัดรัด (0603, 0805) สามารถเผชิญกับการจัดสรรในช่วงที่ตลาดรัดกุม ออกแบบด้วยค่าความจุมาตรฐานและหลีกเลี่ยงการผลักดันขีดจํากัดการลดแรงดันไฟฟ้าเข้าใกล้เกินไป—ใช้ตัวเก็บประจุพิกัด 25V สําหรับการใช้งาน 12V แทนที่จะเป็นชิ้นส่วน 16V
การเพิ่มประสิทธิภาพต้นทุนโดยไม่ลดทอนประสิทธิภาพ

ในการผลิตในปริมาณมากแม้แต่การลดต้นทุนชิ้นงานขนาดเล็กก็ทวีคูณ อย่างไรก็ตาม การเพิ่มประสิทธิภาพต้นทุนโดยการเลือกตัวเหนี่ยวนําที่ถูกกว่าที่มี DCR สูงกว่าหรือตัวเก็บประจุเกรดต่ํากว่าที่มี ESR สูงกว่าอาจทําให้ประสิทธิภาพและความน่าเชื่อถือในระยะยาวลดลง
สร้างสมดุลระหว่างต้นทุนและประสิทธิภาพโดยกําหนดเป้าหมายประสิทธิภาพที่โหลดทั่วไปมากกว่าโหลดสูงสุด โดยยอมรับขนาดส่วนประกอบที่ใหญ่ขึ้นเล็กน้อยเพื่อใช้ชิ้นส่วนที่พร้อมใช้งานมากขึ้น หรือลดความซับซ้อนของคุณสมบัติการควบคุม (เช่น การทํางานความถี่คงที่แทนการแพร่กระจายสเปกตรัม)
| ประเภทส่วนประกอบ | ความเสี่ยงด้านความพร้อมใช้งาน | กลยุทธ์การบรรเทาผลกระทบ |
|---|---|---|
| IC คอนโทรลเลอร์ SMPS | ปานกลาง | ออกแบบด้วยทางเลือกที่เข้ากันได้กับพิน |
| MOSFET กําลัง | MOSFET ต่ํา-ปานกลาง | แหล่งที่มาที่ได้รับการอนุมัติหลายแหล่ง แพ็คเกจมาตรฐาน |
| ตัวเหนี่ยวนํา (พิเศษ) | สูง | แคตตาล็อกชิ้นส่วนจากผู้ขายหลายราย |
| เซรามิกความจุสูง | ปานกลาง | ค่ามาตรฐาน อนุมัติเคสหลายขนาด |
| วงจรเรียงกระแส Schottky/sync | Schottky ต่ํา | ชิ้นส่วนสินค้าหลายแหล่ง |
ตารางนี้สรุปความเสี่ยงของห่วงโซ่อุปทานสําหรับส่วนประกอบ SMPS ทั่วไป สําหรับการออกแบบที่สําคัญ ให้ติดต่อกับผู้จัดจําหน่ายตั้งแต่เนิ่นๆ เพื่อทําความเข้าใจระยะเวลารอคอยสินค้าและการจัดสรร และพิจารณาสินค้าคงคลังฝากขายสําหรับส่วนประกอบที่มีโอกาสในการขายระยะยาว
7. คําถามที่พบบ่อย
อะไรคือความแตกต่างระหว่าง SMPS แบบซิงโครนัสและแบบอะซิงโครนัส?
SMPS แบบซิงโครนัสแทนที่ไดโอดอิสระด้วย MOSFET ช่วยลดการสูญเสียการนําไฟฟ้าและปรับปรุงประสิทธิภาพ 3-8% การออกแบบแบบอะซิงโครนัสใช้ไดโอด Schottky ซึ่งง่ายกว่าและต้นทุนต่ํากว่า แต่กระจายพลังงานได้มากกว่า เลือกซิงโครนัสสําหรับการใช้งานที่ใช้พลังงานจากแบตเตอรี่หรือข้อจํากัดด้านความร้อน แบบอะซิงโครนัสสําหรับอุปกรณ์เสริมที่ไวต่อต้นทุน
ฉันจะคํานวณค่าตัวเหนี่ยวนําที่ต้องการสําหรับตัวแปลงบั๊กได้อย่างไร
ค่าตัวเหนี่ยวนําขึ้นอยู่กับความถี่ในการสลับ แรงดันไฟฟ้าอินพุต/เอาต์พุต กระแสโหลด และกระแสกระเพื่อมที่ต้องการ เป้าหมายการออกแบบทั่วไปคือกระแสกระเพื่อม 20-40% ใช้สูตร: L = (Vout × (Vin - Vout)) / (Vin × ΔIL × Fsw) โดยที่ ΔIL คือกระแสกระเพื่อมและ Fsw คือการสลับความถี่ ตรวจสอบว่าพิกัดกระแสอิ่มตัวเกินกระแสสูงสุด
สามารถใช้ SMPS ในงานยานยนต์ได้หรือไม่?
ใช่ แต่การออกแบบ SMPS ยานยนต์ต้องเป็นไปตามคุณสมบัติ AEC-Q100 สําหรับ IC จัดการกับแรงดันไฟฟ้าข้อเหวี่ยงเย็นลดลงถึง 3.5V อยู่รอดจากการถ่ายโอนโหลดชั่วคราวได้ถึง 40V และเป็นไปตามมาตรฐานการปล่อยมลพิษที่นําไฟฟ้า/แผ่รังสี (CISPR 25) ใช้ส่วนประกอบเกรดยานยนต์และรวมการป้องกันชั่วคราวของอินพุต
อะไรเป็นสาเหตุของความไม่เสถียรหรือการสั่นของ SMPS?
ความไม่เสถียรมักเป็นผลมาจากการชดเชยลูปไม่เพียงพอ ความล่าช้าของเฟสที่มากเกินไปในเครือข่ายข้อเสนอแนะ หรือปัญหาเค้าโครง PCB ที่ทําให้เกิดสัญญาณรบกวนในเส้นทางป้อนกลับ ตรวจสอบว่าระยะขอบเฟสเกิน 45 องศาตลอดช่วงการทํางาน การต่อสายดินที่ไม่ดีหรือการเหนี่ยวนําปรสิตขนาดใหญ่ในตัวเก็บประจุเอาต์พุตอาจทําให้เกิดการสั่นได้เช่นกัน
ฉันจะลด EMI จากแหล่งจ่ายไฟโหมดสวิตช์ได้อย่างไร
ใช้การตอกบัตรแบบสเปรดสเปกตรัมหากคอนโทรลเลอร์รองรับลดพื้นที่ลูปโหนดสลับบน PCB เพิ่มตัวกรองอินพุตและเอาต์พุต (โช้คโหมดทั่วไปตัวเก็บประจุ X / Y) ใช้ตัวเหนี่ยวนําที่มีฉนวนหุ้มและใช้การต่อสายดินที่เหมาะสมกับระนาบต่อเนื่อง ขอบสวิตชิ่งที่ช้าลงจะลด EMI แต่เพิ่มการสูญเสียการสลับ ซึ่งสมดุลตามขีดจํากัดการปล่อยมลพิษของคุณ
อุณหภูมิในการทํางานมีผลกระทบต่อประสิทธิภาพ SMPS อย่างไร?
ประสิทธิภาพลดลงที่อุณหภูมิสูงเนื่องจาก MOSFET RDS(on) และตัวเหนี่ยวนํา DCR ที่เพิ่มขึ้น กระแสไฟนิ่งของคอนโทรลเลอร์อาจเพิ่มขึ้น ซึ่งส่งผลต่อประสิทธิภาพการโหลดเบา ตัวเก็บประจุ ESR เพิ่มขึ้นทําให้ประสิทธิภาพของระลอกคลื่นลดลง ตรวจสอบการออกแบบระบายความร้อนเสมอเพื่อให้แน่ใจว่าอุณหภูมิของจุดเชื่อมต่อยังคงอยู่ในขีดจํากัดของแผ่นข้อมูลภายใต้สภาวะแวดล้อมและโหลดที่เลวร้ายที่สุด
มีทางเลือกอื่นที่เข้ากันได้กับพินหรือไม่หากคอนโทรลเลอร์ SMPS ของฉันล้าสมัย
ตัวควบคุมบั๊กและบูสต์จํานวนมากมีฟังก์ชันการทํางานที่เทียบเท่าจากซัพพลายเออร์คู่แข่ง แม้ว่าความเข้ากันได้ของพินที่แน่นอนจะหายาก เมื่อออกแบบ ให้จัดทําเอกสารพารามิเตอร์ที่สําคัญ (ความถี่การสลับ โทโพโลยีป้อนกลับ เครือข่ายการชดเชย) เพื่อให้สามารถประเมินชิ้นส่วนที่เทียบเท่าได้ ผู้ผลิตบางรายเสนอโปรแกรมอายุการใช้งานที่รับประกันความพร้อมใช้งานเป็นเวลา 10+ ปีในการใช้งานในอุตสาหกรรม/ยานยนต์
จําเป็นต้องมีการทดสอบอะไรบ้างในการตรวจสอบการออกแบบ SMPS
อย่างน้อยที่สุด ให้ทดสอบประสิทธิภาพตลอดช่วงโหลด การควบคุมสายและโหลด การตอบสนองชั่วคราวต่อขั้นตอนการโหลด การกระเพื่อมของอินพุต/เอาต์พุต และประสิทธิภาพการระบายความร้อนภายใต้ภาระสูงสุด สําหรับการใช้งานที่มีความสําคัญต่อการปฏิบัติตามข้อกําหนด ให้ดําเนินการทดสอบการปล่อยมลพิษและการแผ่รังสี (EMI) การทดสอบการถ่ายโอนข้อมูลโหลดและข้อเหวี่ยงเย็น (ยานยนต์) และการทดสอบการแยกความปลอดภัย (ทางการแพทย์/AC-DC)
8. บทสรุปและขั้นตอนต่อไปที่แนะนํา
การเลือกและออกแบบด้วยพาวเวอร์ซัพพลายโหมดสวิตช์จําเป็นต้องสร้างสมดุลระหว่างประสิทธิภาพ ต้นทุน ความพร้อมใช้งานของส่วนประกอบ และความซับซ้อนในการออกแบบกับข้อกําหนดเฉพาะของแอปพลิเคชันของคุณ ตัวแปลงบั๊กครองการควบคุมจุดโหลดในระบบที่ใช้พลังงานจากแบตเตอรี่และระบบดิจิทัล เนื่องจากประสิทธิภาพสูงและความเรียบง่ายในการออกแบบ ตัวแปลงบูสต์ให้บริการไดรเวอร์ LED และแอปพลิเคชันสํารองแบตเตอรี่ โทโพโลยีแบบ Buck-boost และแบบแยกระบุช่วงอินพุตที่กว้างและข้อกําหนดในการแยกความปลอดภัยโดยแลกกับส่วนประกอบเพิ่มเติมและความพยายามในการออกแบบ
หากแอปพลิเคชันของคุณให้ความสําคัญกับประสิทธิภาพและทํางานจากแรงดันไฟฟ้าอินพุตที่เสถียรสูงกว่าความต้องการเอาต์พุตของคุณ ให้เริ่มต้นด้วยตัวแปลงบั๊กแบบซิงโครนัส หากแรงดันไฟฟ้าขาเข้าแตกต่างกันอย่างมากหรือข้ามแรงดันเอาต์พุตเป้าหมายของคุณ ให้ประเมินโทโพโลยี buck-boost หรือ SEPIC สําหรับการออกแบบแบบแยกส่วน ตัวแปลงฟลายแบ็คให้ความสมดุลที่ดีที่สุดระหว่างต้นทุนและประสิทธิภาพที่ต่ํากว่า 100W
ก่อนเสร็จสิ้นการออกแบบ ให้ตรวจสอบความเสถียรของลูปภายใต้สภาวะการทํางานที่เลวร้ายที่สุด ตรวจสอบประสิทธิภาพการระบายความร้อนด้วยโปรไฟล์โหลดที่สมจริง และดําเนินการทดสอบการปฏิบัติตามข้อกําหนดล่วงหน้าของ EMI หากผลิตภัณฑ์ของคุณต้องเผชิญกับข้อกําหนดด้านกฎระเบียบ มีส่วนร่วมกับซัพพลายเออร์ส่วนประกอบตั้งแต่เนิ่นๆ เพื่อทําความเข้าใจระยะเวลารอคอยสินค้าสําหรับตัวเหนี่ยวนําและไอซีพิเศษ และออกแบบด้วยตัวเลือกแหล่งที่สองเพื่อลดความเสี่ยงของห่วงโซ่อุปทาน
สําหรับการสนับสนุนด้านเทคนิคเพิ่มเติม โปรดดูบันทึกการใช้งานจากผู้ผลิตคอนโทรลเลอร์ SMPS รายใหญ่ ดาวน์โหลดการออกแบบอ้างอิงที่ตรงกับโทโพโลยีและระดับพลังงานของคุณ และพิจารณาใช้เครื่องมือออกแบบออนไลน์ที่ทําให้การเลือกส่วนประกอบและการคํานวณการชดเชยลูปเป็นไปโดยอัตโนมัติ หากการออกแบบของคุณเกี่ยวข้องกับระดับพลังงานสูง (สูงกว่า 100W) โทโพโลยีที่แยกจากกัน หรือข้อกําหนด EMI ที่เข้มงวด การปรึกษากับวิศวกรแอปพลิเคชันภาคสนาม (FAE) สามารถป้องกันการทําซ้ําการออกแบบที่มีค่าใช้จ่ายสูงได้